Изобретение относится к подъем но-трат- портному машиностроению, а именно к кон сольным поворотным кранам для монтажных и перегрузочных работ
Цель изобретения - расширение области применения
На фиг 1 показан кран в условиях работы в манипуляторном режиме, общий вид; на фиг. 2то же, вид сверху; на
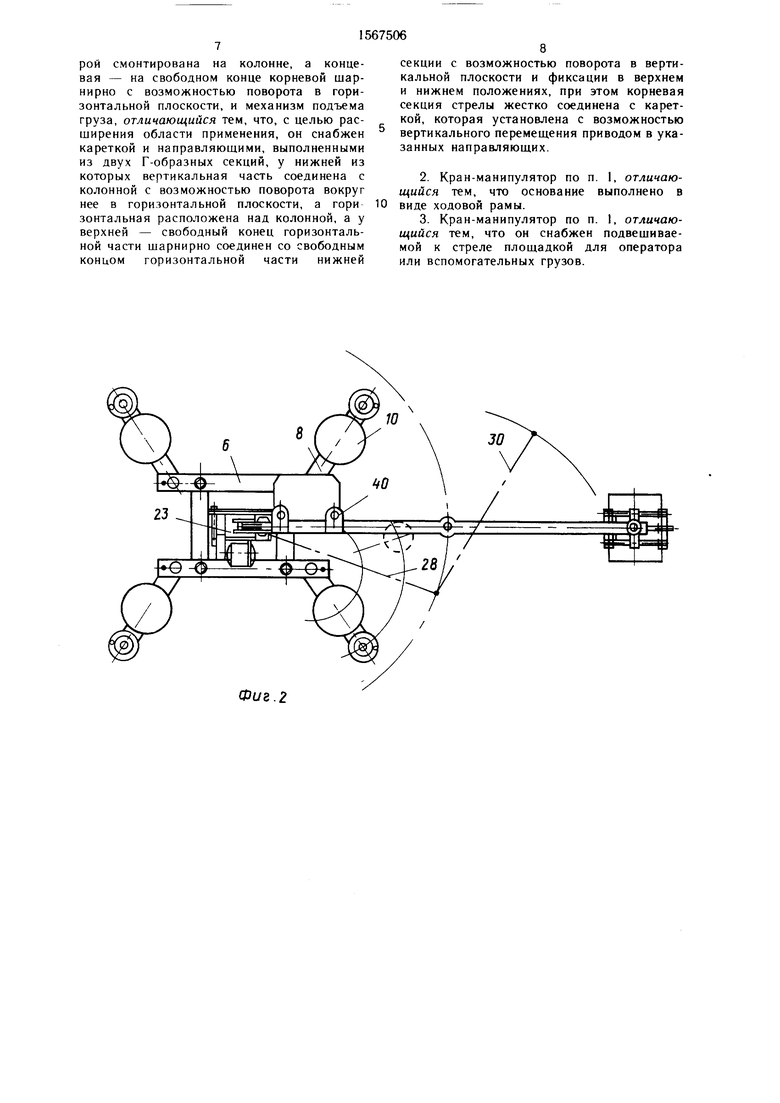
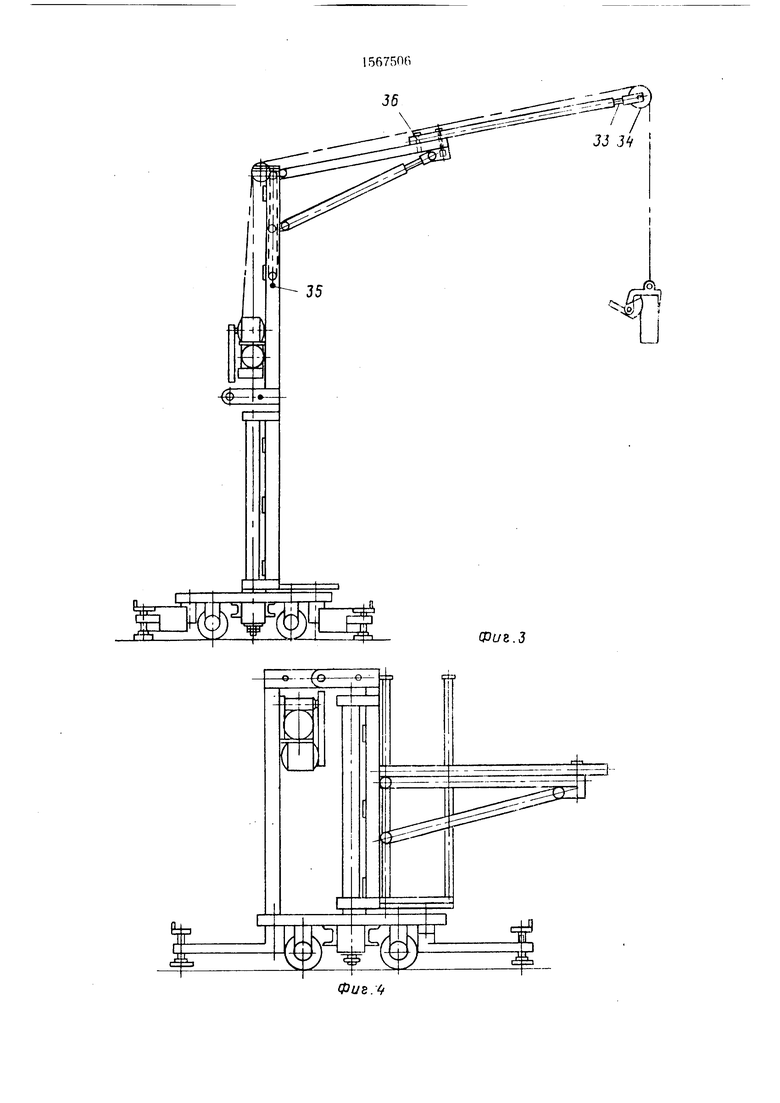
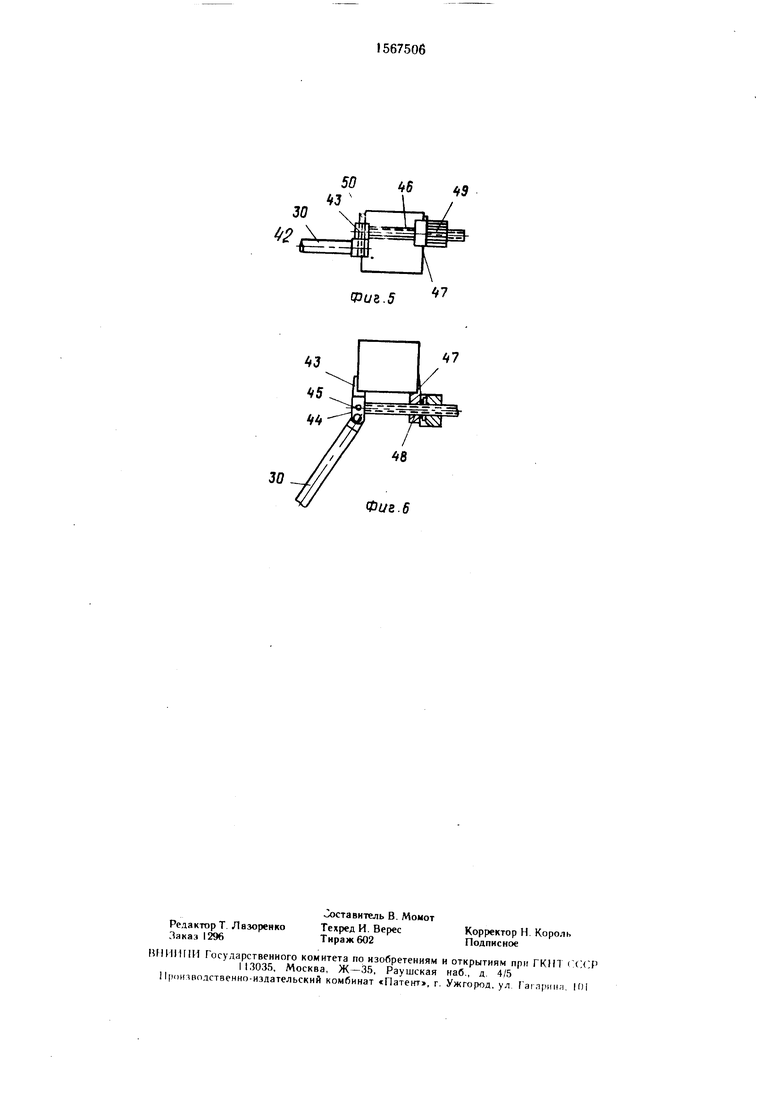
фиг. 3 - то же.со стрелой в условиях работы в режиме укосины, вид сбоку; на фиг. 4 - то же, в тра нспортном состоянии; на фиг 5 - схват к крану, вид сбоку, на фиг. 6 -- то же, вид сверху
Кран-манипулятор содержит тележку I. колонну 2, стрелу 3, несущую схват 4, направляющие 5 для вертикального перемещения стрелы 3
Тележка 1 имеет раму 6, четыре полно поворотных ходовые колеса 7 с осями поворота, расположенными по углам квадрата, четыре поворотные выносные опоры 8, снабженные регулировочными винтовыми домкратами 9 и накладными балластами 10.
Заделанная нижним концом неподвижно в тележке 1 колонна 2 охвачена двумя ра- диально-упорными подшипниками 11, корпуса которых скреплены с нижней частью 12 направляющих 5, верхняя часть 13 которых скреплена с нижней частью, вынесенной в сторону шарнирной осью 14, причем для фиксации в рабочем положении прикрепленные к верхним и нижним направляющим кронштейны 15 и 16 связаны в этом положении запором, выполненным в виде шкворня 17
На верхнем конце направляющих расположен блок 18 для каната 1Q электролебедки 20, содержащей электродвигатель 21, связанный клиноременной передачей с редуктором 22, выходной вал которого сопряжен с барабаном 23, на который намотан канат 19. В вертикальных направляющих 5 установлены каткч 24 подъемной капгтки
L 5 составляющей часть стрелы 3 п подвешенной к канату 19
К. ретка 25 сочленена горизошальными шарни) IMH с нижним эчементом 26 и верхним элементом 27, образ н в целом корневую с секцию 28 стрелы 3 Через вертикальную шарнирную ось 29 корневая секция 28 сое динена с концевой секцией 30 стрелы 3
Нижний элемент 26 . телескопическим из двух труб, вс-аллейных одна в другую и фиксируемых одна относительно 0 Другой шкворнем 31 для придания всей стреле горизонтального или направленного вверх положения.
Концевая секция 30 3 выполнена также телескопической с фиксацией составляющих ее труб о,та п другой с чо5 МОЩЬЮ ШКВОрНЯ 32 С ВОЗМОЖНО Г ,Ю ЧТИМ
путем 1ццять стрелу 3 Крннпою можно лтенять трубой 3.), снабженной блоком 34, в случае работы стрелы 3 в режиме укосины. При этом от каретки 25 отцепляют канат 19 лебедки 20 и фиксируют ее неподвижно шкворнем 35 (фиг. 3). Концевая секция 30 имеет запор (шкворень) 36 для фиксирования к корневой секции 28 при работе в режиме укосины
К нижней части 12 вертикальных на5 правляющих жестко прикреплена небольшая консоль 37 для поддррж-шия в нижнем положении площадки 38, служащей для подъема оператора К ней прикреплены вертикальные стойки-подвески 39, пропущенные через петли 40, приваренные к верхнему
0 элементу 27 корневой секции 2ft стрелы 3 и имеющие возможности отхватывать стойки 39 за их упоры 41, чтобы по :нгмать площадку 38 вместе с оператором При необ ходимости, исходя из требуемой высоты подъема площадки 38, стойки 39 могут вы5 подняться телескопическими
Изображенный на фиг 5,6 схват 42 другой конструкции, сопря ярмый с концевой 30 стрелы 3 шарнирио имеет ьер0
тикальную щеку 43, снабженную консолью 44 для такого крепления и жестко скрепленную штифтом 45 с винтом 46. На винт 46 надета с возможностью свободного скольжения вторая щека 47 с гладким отверстием и шпонкой 48, погруженной в имеющийся на винте 41 продольный паз для предотвращения прокручивания щеки 47 по отношению к винту.
Щека 47 сопряжена проточками с посаженной на резьбе того же винта 46 гайкой 49 для защемления и разведения щек 43, 47. В консоль 44 щеки 43 запрессован штырь 50, выступающий по обе стороны консоли 44 и вставляемый с возможностью свободного вращения в вертикальное отверстие на конце концевой секции 30 стрелы 3. Это дает возможность оператору поворачивать схват 42 по отношению к стреле 3 под желаемым углом. Два выступающих конца
требующие при укладке груза подъем, оператора на поцмость во избежание при каждом переносе хождение по лестнице, он может пользоваться площадкой 38, которая, когда стрела 3 поднимается на соответствующую высоту подтягивается вверх корневой секцией 28 стрелы 3 вместе с one ратором.
При переводе крана с манипуляторного режима работы в режим укосины в первую.
10 очередь фиксируют секции стрелы 3 жестко по отношению друг к другу с помощью шкворня 36 (фиг. 3), затем всю стрелу 3 поднимают в верхнее положение и фиксируют в нем шкворнем 35. предваритель15 но установив блок 34 на концевой секции 30 стрелы 3, или по необходимости, заменяя концевую трубу в этой секции, а также выставляя всю стрелу 3 под желаемым наклоном вверх.
Далее конец каната 19 лебедки 20 отъештыря 50 позволяют разворачивать схват 20 диняют от каретки 25 и. проведя его над 42 по отношению к стреле 3 в ту или инуюстрелой 3, огибают им блок 34, опуская
сторону.конец каната 19, предпочтительно снабженный коушем, вниз и подвешивая на нем
Кран-манипулятор работает следующим образом.
При использовании крана в режиме манипулятора стрела 3 через свою подъемную каретку 25 подвешена к канату 19, прикрепленному к нижней части последней. Для подъема стрелы 3 канал 19 наматывает25
грузоподъемное устройство - крюк, горизонтальные вилы, схват и т.п. Перенос грузов на грузоподъемном устройстве производят затем прямым наматыванием каната 19 на барабан лебедки 20 при неподвижной стреле 3.
Кран характеризуется высокой маневренся на барабан 23 электролебедки 20, оги- 30 ностыо и проходимостью через проемы малой
бая блок 18 на верхнем конце вертикальных направляющих 13, и подтягивает каретку 25 вместе со всей стрелой 3 и подвешенным к ней схватом 42. На фиг. 1 показан обычный самозащемляющийся схват 4 на подвеске, которым можно пользоваться, когда нет надобности поднимать изделия на высоту самой стрелы 3 или даже большую, что становится возможным при использовании другого схвата 42, изображенного на фиг. 6,5.
Консольно-поворотный схват 42 обладает 40 возможностью переносить грузы на вылете по отношению к стреле 3 и которые он захватывает сбоку, поэтому высота груза может превышать высоту стрелы 3 крана. Крепвысоты и ширины, а также малыми транспортными габаритами и небольшой массой, что позволяет перевозить его на грузовых автомашинах любой грузоподъемности, а при необходимости на коротких участках пути 35 переносить на руках (со снятыми балластами) четырьмя- шестью рабочими.
Чтобы перевести кран в изображенное на фиг. 1 транспортное состояние, или в состояние, обеспечивающее проходимость сквозь узкие проемы, такие как обычные двери, стрелу 3 опускают в нижнее положение, загибая концевую секцию 30 почти на 180° в горизонтальной плоскости Затем вынимают фиксирующий шкворень 17 из кронштейнов 15, 16 и разворачивают в
ление груза в схвате 42 осуществляется 4g вертикальной плоскости верхнюю часть 13
двумя щеками 43 и 47, а обжатие переносимого ими груза производят, закручивая гайку 49, которая перемещает щеку 47. Схват 42 особенно эффективен при кладке штабелей изделий, стеновых камней под перекрытие -помещения и т.п.
Перенос изделий на уровнях, соответствующих человеческому росту, оператор производит, перемещаясь на нулевой отметке вместе со схватом 42, воздействуя на него рукой для его горизонтальных движений и на кнопки или другие органы управления 55 лебедкой 20 для опускания и подъема схвата 42 вместе со всей стрелой 3. Если переносы производятся на более высокие уровни.
вертикальных направляющих в запрокинутое положение. Далее вынимают фиксаторы, удерживающие выносные опоры 8 в рабочем положении и, предпочтигелььо сняв балласты 10, поворачивают эти опоры 50 8 попарно навстречу друг к другу за передним и задним концами рамы 6 с тем. чтобы ширина всего крана определялась шириной рамы 6.
Формула изобретения
1. Кран-манипулятор, содержащий установленную на основании колонну, двухсекционную стрелу, корневая секция кототребующие при укладке груза подъем, оператора на поцмость во избежание при каждом переносе хождение по лестнице, он может пользоваться площадкой 38, которая, когда стрела 3 поднимается на соответствующую высоту подтягивается вверх корневой секцией 28 стрелы 3 вместе с one ратором.
При переводе крана с манипуляторного режима работы в режим укосины в первую.
очередь фиксируют секции стрелы 3 жестко по отношению друг к другу с помощью шкворня 36 (фиг. 3), затем всю стрелу 3 поднимают в верхнее положение и фиксируют в нем шкворнем 35. предварительно установив блок 34 на концевой секции 30 стрелы 3, или по необходимости, заменяя концевую трубу в этой секции, а также выставляя всю стрелу 3 под желаемым наклоном вверх.
Далее конец каната 19 лебедки 20 отъе
грузоподъемное устройство - крюк, горизонтальные вилы, схват и т.п. Перенос грузов на грузоподъемном устройстве производят затем прямым наматыванием каната 19 на барабан лебедки 20 при неподвижной стреле 3.
Кран характеризуется высокой маневренностыо и проходимостью через проемы малой
высоты и ширины, а также малыми транспортными габаритами и небольшой массой, что позволяет перевозить его на грузовых автомашинах любой грузоподъемности, а при необходимости на коротких участках пути переносить на руках (со снятыми балластами) четырьмя- шестью рабочими.
Чтобы перевести кран в изображенное на фиг. 1 транспортное состояние, или в состояние, обеспечивающее проходимость сквозь узкие проемы, такие как обычные двери, стрелу 3 опускают в нижнее положение, загибая концевую секцию 30 почти на 180° в горизонтальной плоскости Затем вынимают фиксирующий шкворень 17 из кронштейнов 15, 16 и разворачивают в
вертикальной плоскости верхнюю часть 13
вертикальных направляющих в запрокинутое положение. Далее вынимают фиксаторы, удерживающие выносные опоры 8 в рабочем положении и, предпочтигелььо сняв балласты 10, поворачивают эти опоры 8 попарно навстречу друг к другу за передним и задним концами рамы 6 с тем. чтобы ширина всего крана определялась шириной рамы 6.
Формула изобретения
1. Кран-манипулятор, содержащий установленную на основании колонну, двухсекционную стрелу, корневая секция которой смонтирована на колонне, а концевая - на свободном конце корневой шар- нирно с возможностью поворота в горизонтальной плоскости, и механизм подъема груза, отличающийся тем, что, с целью расширения области применения, он снабжен кареткой и направляющими, выполненными из двух Г-образных секций, у нижней из которых вертикальная часть соединена с колонной с возможностью поворота вокруг нее в горизонтальной плоскости, а гори зонтальная расположена над колонной, а у верхней - свободный конец горизонтальной части шарнирно соединен со свободным концом горизонтальной части нижней
секции с возможностью поворота в вертикальной плоскости и фиксации в верхнем и нижнем положениях, при этом корневая секция стрелы жестко соединена с кареткой, которая установлена с возможностью вертикального перемещения приводом в указанных направляющих.
2.Кран-манипулятор по п. 1, отличающийся тем, что основание выполнено в
виде ходовой рамы.
3.Кран-манипулятор по п. I, отличающийся тем, что он снабжен подвешиваемой к стреле площадкой для оператора или вспомогательных грузов.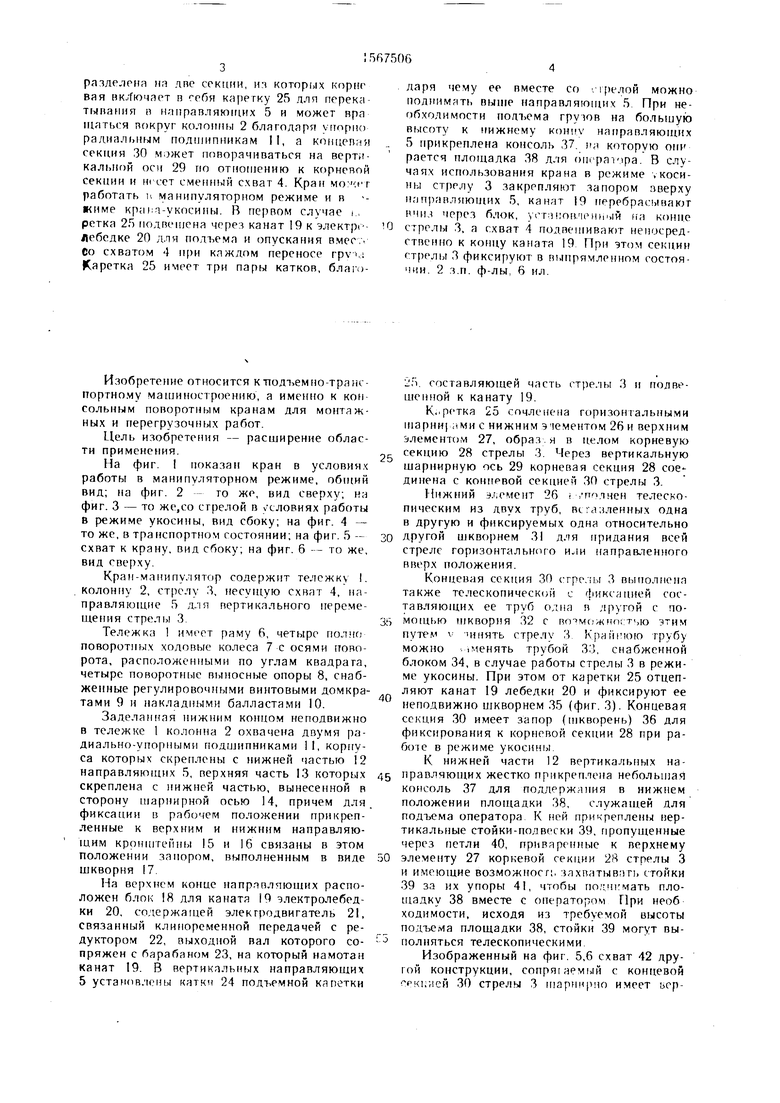

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Передвижной кран Розина К.Б. | 1988 |
|
SU1588652A1 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| Кран-манипулятор | 1985 |
|
SU1271817A1 |
| ПУТЕУКЛАДЧИК ТРАКТОРНЫЙ | 2023 |
|
RU2808047C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Грузоподъемный кран | 1989 |
|
SU1735198A1 |
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |
Изобретение относится к подъемно-транспортному машиностроению, точнее к консольным поворотным кранам для монтажных и перегрузочных работ. Цель изобретения - расширение области применения. Кран-манипулятор состоит из тележки 1, колонны 2, стрелы 3, несущей схват 4, направляющих 5 для вертикального перемещения стрелы 3. Тележка 1 имеет четыре ходовых колеса 7 и четыре выносные опоры 8 с домкратами 9 и накладными балластами 10 для повышения устойчивости. Направляющие 5 разделены по высоте на две части, из которых верхнюю 13 можно запрокидывать вокруг выносного шарнира 14 для прохождения через низкие проемы
стрела 3 разделена на две секции, из которых корневая включает в себя каретку 25 для перекатывания в направляющих 5 и может вращаться вокруг колонны 2 благодаря упорно-радиальным подшипникам 11, а концевая секция 30 может поворачиваться на вертикальной оси 29 по отношению к корневой секции и несет сменный схват 4. Кран может работать в манипуляторном режиме и в режиме крана-укосины. В первом случае каретка 25 подвешена через канат 19 к электролебедке 20 для подъема и опускания вместе со схватом 4 при каждом переносе груза. Каретка 25 имеет три пары катков, благодаря чему ее вместе со стрелой можно поднимать выше направляющих 5. При необходимости подъема грузов на большую высоту к нижнему концу направляющих 5 прикреплена консоль 37, на которую опирается площадка 38 для оператора. В случаях использования крана в режиме укосины стрелу 3 закрепляют запором вверху направляющих 5, канат 19 перебрасывают вниз через блок, установленный на конце стрелы 3, а схват 4 подвешивают непосредственно к концу каната 19. При этом секции стрелы 3 фиксируют в выпрямленном состоянии. 2 з.п. ф-лы, 6 ил.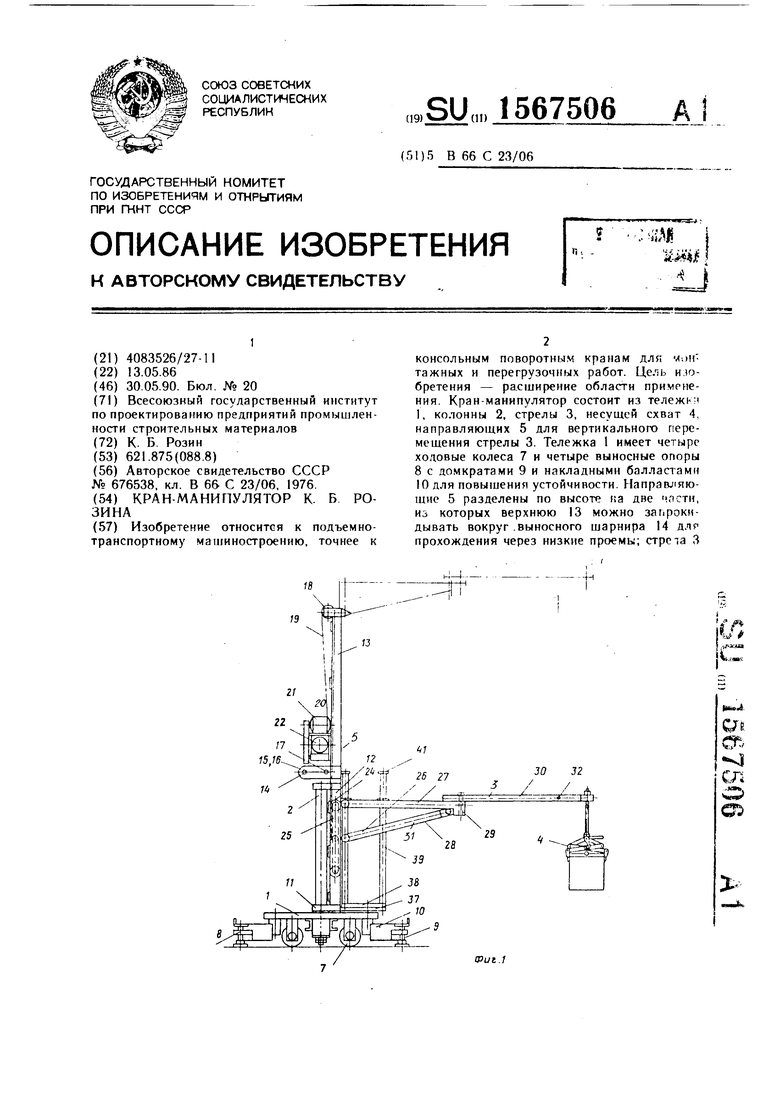
Фиг. 2
Фиё.4
Фиг.5
47
Фиг. 6
| Консольно поворотный кран | 1976 |
|
SU676538A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
