1
Изобретение относится к аналоговой технике.
Известны устройства для моделирования ударных систем, содержащие п блоков решения уравнений движения, состоящих из последовательно включенных первого и второго интеграторов и п управляемых следящих систем, каждая из которых состоит из подключенных к блоку управления и последовательно соединенных блока памяти, сумматора и управляемого усилителя с релейной характеристикой.
Однако известные устройства не могут бытприменены для моделирования многомерных ударных систем.
Предложенное устройство отличается тем, что оно содержит блок решения уравнений удара, входы которого присоединены к выходам первых интеграторов соответствующих блоков решения уравнений движения, а выходы подключены ко входам блоков памяти соответствующих управляемых следящих систем, другие входы сумматоров которых и выходы управляемых усилите.тей с релейной характеристикой подключены соответственно к выходам и входам первых интеграторов соответствующих блоков решения уравнений движения.
Это позволяет расширить область применения предлагаемых устройств.
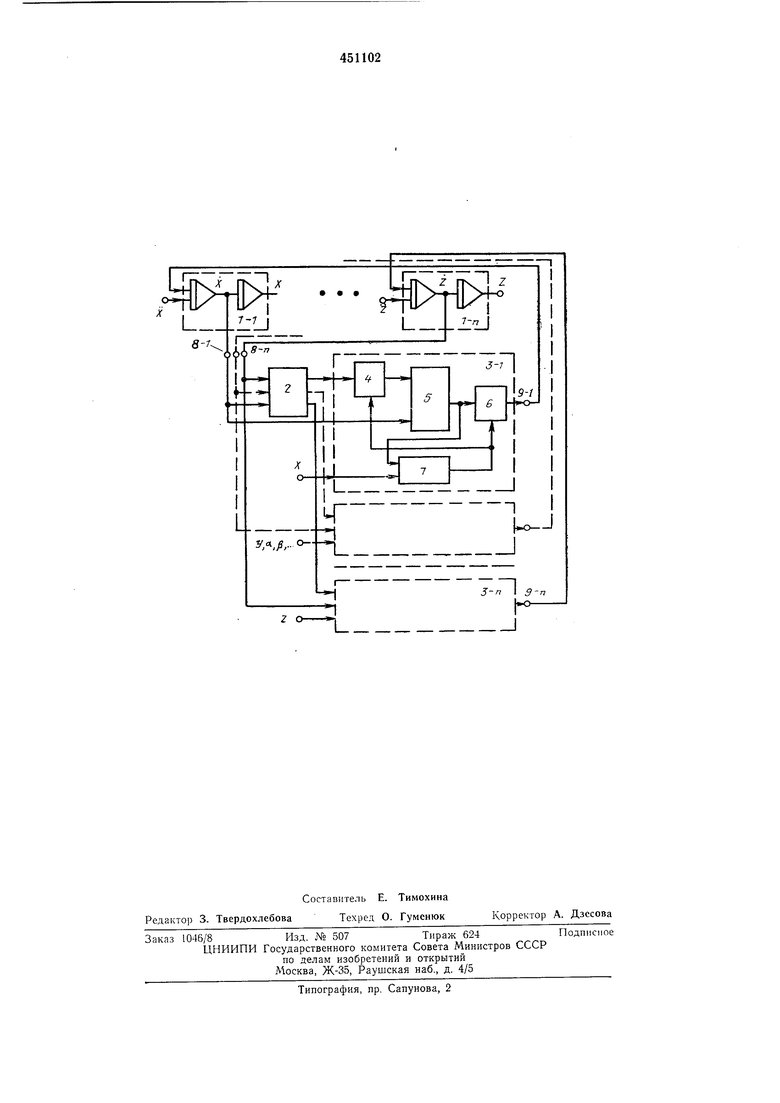
На чертеже изображена блок-схема предлагаемого устройства.
Устройство содержит группы интеграторов 1 1,,... блоков решения основных уравнений движения системы, блок 2 решения уравнений удара, управляемые следящие системы 3-1, 3-2,..., 3-я, формирующие новые начальные условия для первых интеграторов групп 1-1, 1-2,..., 1-п. Каждая следящая система содержит управляемый блок 4 памяти, сумматор 5, управляемый усилитель 6 с релейной характеристикой и блок 7 управления.
Группы интеграторов 1-1, 1-2,.., 1-п решают основные уравнения движения системы но различным степеням свободы (х, у, a,..,z). Это означает, что в общем случае при ударе тела об ограничитель он совершает не только поступательное движение, но и сложное вращательное движение. Выходные сигналы из каждой группы интеграторов с выходов 8-1, 8-2,.., 8-п, пропорциональные текущим значениям составляющей скорости по отдельным координатам, поступают на входы блока 2 решения системы уравнений удара. Система уравнений удара может быть решена как с помошью нелинейных аналоговых моделирующих устройств, так и с помощью быстродействующих аналого-цифровых вычислительных систем в случае, когда система уравнений удара является весьма сложной. На выходе блока 2 формируются послеударные скорости массы по отдельным координатам. Так, например, выход блока 2, в котором сигнал, пропропорциональный послеударной скорости по координате х подключен на вход управляемого блока 4 памяти. Блок 7 управления, на вход которого поступает сигнал, пропорциональный положению массы, по координате х управляет запоминающим блоком 4 так, что при отсутствии удара он работает в режиме «слежения, и на вход сумматора 5 поступает сигнал, пропорциональный послеударной скорости на массы по координате- X. Он сравнивается на входе сумматора 5 с сигналом, поступающим с выхода 8-1 интегратора 1-1 и пропорциональным текущей скорости массы по координате х. Сигнал с выхода сумматора 5 поступает на вход управляемого усилителя 6, который при отсутствии удара сигналом блока 7 управления заблокирован, и на выходе 9-1 сигнал отсутствует. При ударе блок управления 7 управляет устройством 4 так, что оно работает в режиме «хранения, и на выходе фиксируется значение послеударной скорости по координате х. Блок 7 прекращает также блокирование выхода усилителя 6. При разности сигналов на входах сумматора 5, т. е. при несовпадении послеударной скорости, фиксируемой на выходе устройства 4, и текущего значения скорости но X на выходе 8-1, напряжение на выходе 9-1 скачкообразно возрастает и скачкообразно изменяет начальные условия первого интегратора блока 1-1 до такой величины и знака, пока на входах сумматора 5 сигналы уравновешиваются. При этом значение скорости по координате х оказывается полностью замененной послеударной. При фиксировании блоком 7 окончания удара устройство 4 переводится в режим «слежения, а выход усилителя 6 блокируется. Замена текущей скорости послеударной происходит мгновенно. Аналогично работает схема для замены текущих скоростей послеударными в момент удара и для других степеней свободы. Начальные условия заменяются соответственно через выходы 9-2, 9-3,..., 9-п в группах интеграторов 1-2, 1-3, -п. .Применение такой схемы легко распрострапяется н для моделирования многомерных виброударных систем с несколькими соударяюьчимися
массами. При этом имеется mX« групп интеграторов, пУ(,т входов блока 2 и /гх/п управляемых следящих систем с устройствами заиоминания, где т - число соударяющихся масс.
Предмет изобретения
Устройство для моделирования ударных систем, содержащее п блоков рещения уравнений движения, состоящих из последовательно
включенных первого и второго интеграторов и п управляемых следящих систем, каждая из которых состоит из иодключенных к блоку управления и иоследовательно соединенных блока иамяти, сумматора и управляемого усилителя с релейной характеристикой, отличающееся тем, что, с целью расширения области применения, оно содержит блок решения уравнений удара, входы которого присоединены к выходам первых интеграторов соответствующих блоков решения уравнений движения, а выходы подключены ко входам блоков памяти соответствующих управляемых следящих систем, другие входы сумматоров которых и выходы управляемых усилителей с
релейной характеристикой подключены соответственно к выходам и входалг первых интеграторов соответствуюил,их блоков решения уравнений движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Электронная модель удара | 1977 |
|
SU658575A1 |
| В.-С. С. Зарецкас, В. Л. Рагульскене и И. И. СкучасКаунасский политехнический институт | 1970 |
|
SU273535A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Устройство для моделирования м-фазного вентильного преобразователя | 1974 |
|
SU524200A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |