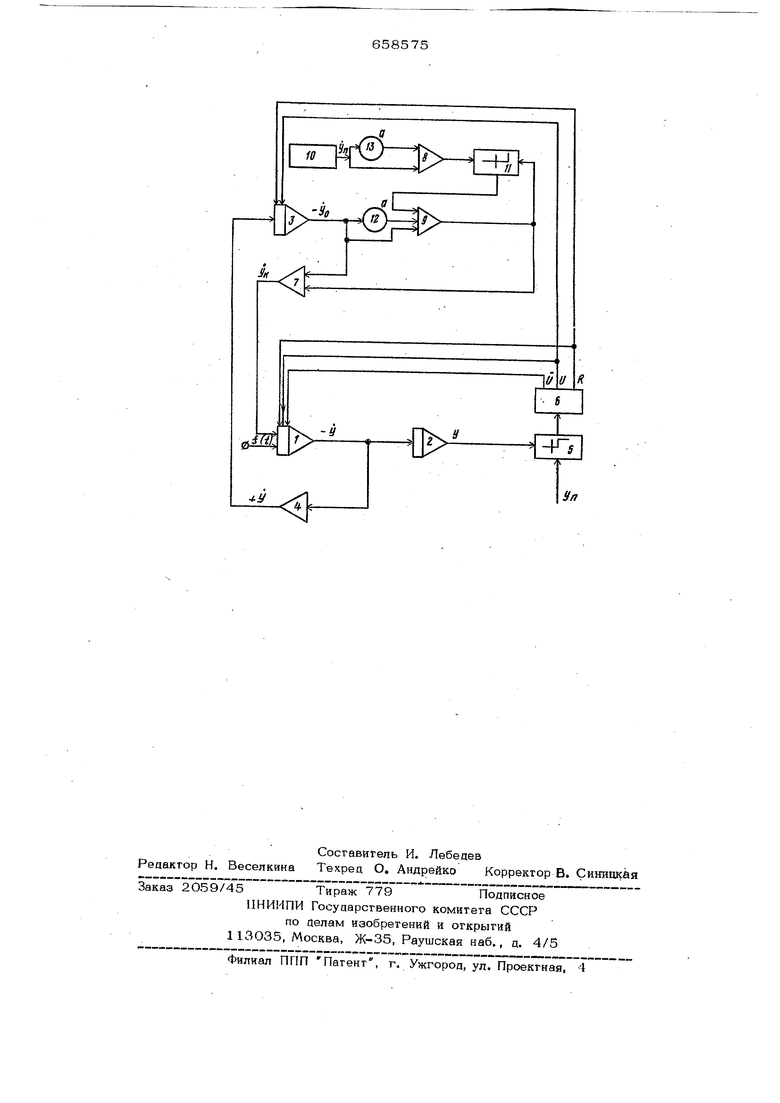
Изобретение относится к вычислитепь ной технике и может быть использовано, например, в тренажерах при имитации динамийи движения транспортных средств. Известны электронные модели удара, содержащие схему моделирования /шижения Teha до и после удара и схему для задания послеударной скорости, включающую элементы сравнения, реле и запоминающие элементы l . Недостаток этих устройств заключает- ся в том, что при моделировании удара учитываются только упругие свойства соударяющихся гел, но совершенно игнориру ется возможность дифференциации преград по прочностным характеристикам движуще гося тела, что заранее предопределяет знак послеударной скорости. Поэтому на известных моделях невозможно получить послеударную сворость того же знака, что и предударная, т.е. невозможно моделировать факт преодолеттея преграды. Это сужает класс решаемы с помощью этих мо делей задач. Наиболее близкой по техш1ческой сущности к предлагаемой является электронная модель удара, содержащая управляемый интегратор, первый информационный вход которого подключен ко входу устройства, а выход соединен со входом интегратора, выход которого подключен к первому входу блока сравнения, второй вход которого подключен ко входу устройства, а выход соединен со входом блока задержки процесса решения, первый, второй и третий выходы которого соединены соответственно с тремя управляющими входами управляемого интегратора, инвертор, вход которого ;поаключеда к выходу управляемого интегратора, а выход соединен со входом управл5гемого следящего интегратора, два управляющих входа которого подключены соответственно ко второму и третьему выходам блока задержки процесса реше-, ния 2 . Недостаток данной модели заключается в том, что она моделирует удар о непреодолимую преграду. Цепь изобретения - расширение функциональных возможностей устройства за сче моделирования преодоления преграды. Для достижения цепи в устройство дополнительно введены блок формирования характеристики прочности преграды, первый и второй сумматоры, первый и второй депитепи напряжения, ограничитель и операционный усилитель, один вход которого непосредственно, .а .другой вход через пер вый делитель напряжения подключены к выходу управляемого следящего, интегратора, соединенному с одним входом пер-вого сумматора, выход которого подключен ко второму информационному входу уп равляемого интегратора, а другой вход первого сумматора подключен к выходу рпераииочного усилителя, соединенному с первым входом ограничителя, выход которого соединен с третьим входом операционного усилителя, а второй вход ограни читёля подключен к выходу второго сумма тора, один вход которого непосредственно а другой вход через второй делитель напряжения соединены с выходом блока форм рования характеристики прочности прегра ды. Модель (см. чертеж) состоит из управ ляемого интегратора 1, интегратора 2, управляемого следящего интегратора 3, инвертора 4, блока сравнения 5, блока за держки процесса решения 6, сумматоров 7 и 8, операционного усилителя 9, блока 10 формирования характеристики прочности преградь ограничителя 11 и делителей напряжения 12 и 13. На чертеже: У - текущая скорость движущегося тепаУд - предударная скорость тела; У - послеударная скорость тела; У - .перемещение тела} У,-ч оордината преграды; У - величина, имеющая размерность скорости и являющаяся характеристикой прочности преграды при ударе об нее тепа заданной массы Моедпь работает следующим образом. Под действием возмущающей функции f ( f ). поданой на первый информационный вход управляемого интегратора 1, работающего в режиме Решение, на ег выходе формируется напряжение, которое соответствует текущей скорости У , а на выходе интегратора 2 - напряжение, соот ветствующее перемещению У . Одновремен но управляемый следящий интегратор 3 отслеживает инвертированное инвертором 4 напряжение на выходе управляемого интегратора 1. В момент удара, т.е. в момент, когда перемещение У станет равным заданой координате преграды У , -срабатывает блок сравнения 5 и на выходе блока задержки процесса рещения 6 формируется одиночная серия последовательных сигналов U , R , X) и Сигналом U останавливается процесс решения, управляемый следящий интегратор 3 переводится в режим SanoMHHairae, а управляемый интегратор 1 - в режим Слежение. Емкосгь .в обратной связи интегратора 1 пе.резаряжается до значения напряжения, равного напряжению на выходе сумматора 7, .которое соответствует величине послеударной скорости. С выдержкой времени, достаточной для окончания процесса перезарядки емкости, сигналом R интегратор 3 возвращается в режим Слежение, а с .некоторым интервалом сигналом U осуществляется Пуск модели. Величина напряжения на выходе сумматора 7 в момент удара тела о преграду .двояко зависит от величины выходного напряжения следящего интегратора 3, т,е. двояко зависит от величины предударной скорости. Если в момент удара скорость гела Уд меньше заданной величины У , то суммарное входное напряжение операционного усилителя 9, подаваемое со следяше,го интегратора 3 непосредственно и через ;депитель напряжения 12, будет меньше суммарного входного напряжения сумматора 8, подаваемого с блока формирования характеристики прочности преграды 10 непосредственно и через делитель напряжения 13. При этом ограничитель 11 не сработает и на выходе сумматора 7 будет напряжение, соответствующее послеударной скорости. У у-Уо-«Уо -аУс к о О о о Как видно из формулы.(1), в результате удара скоростьтела изменила как величину (пропорционально коэффициенту восстановления скорости а ), так и знак, В данном случае удар воспроизводится аналогично тому, как это происходит в известных устройствах, где преграда пред-, полагается непреодолимой. Если же в момент удара скорость тела У больше заданной величины У,, , то за счет действия блока ограничения 11 выходная величина операционного усилителя 9 установится на заданном уровне У| , в результате чего послеударна скорость буцет вычисляться по формуле УГ О-УП. (2) Поскольку по условию имеем Уд у, , то из формулы (2), следует, что , т. е. послеударная скорость по знаку совпадает; с предударной. Этот факт свидетельствует о том, что преграда преодолена и тел о после удара продолжает двигать- . 0 ся в том же направлении. В момент удара преграда как бы отбирает у тела часть запасенной им скорости, не изменяя при этом направления его движения Нетрудно убедиться, что при мо- дель не будет воспроизводить удара ще или, другими словами, преграда преодолима при любой скорости тела, а при будет моделироваться только удар о непреодолимую преграду. Таким образом, предлагаемое устройство при соответствующей настройке блока формирования характеристики прочности преграды позволяет моделировать: а)удар о непреодолимую преграду ( или )„ 00) ; б)удар о преодолимую преграду 1У„ у„ или д 0) Формула изобретения Электронная модель удара, содержаща управляемый интегратор, первый информ ционный вход которого подключен ко вхо ду устройства,-, а выход соединен со входом интегратора, выход которого подклю чен к первому входу блока сравнения, вт рой вход которого подключен ко входу устройства, а выхш соединен со входом блока задержки процесса решения, первы 6 756 второй и третий выходы которого соединены соответственно с тремя управляющими входами управляемого интегратора, инвертор, вход которого подключен к выходу управляемого интегратора, а выход соединен со входом управляемого следятцего интегратора, два управляющих входа которого подключены соответственно ко второму и третьему выходам блока задержки процесса решения, отлича-ющаяся тем, что, с целью расширения функииональных возможностей за счет моделирования преодоления преграды, ;в нее дополнительно введены блок формирования характеристики прочности преграды, первый и второй сумматоры, первый и второй делители напряжения, ограничитель и операционный усилитель, один вход которого непосредственно, а другой вход через первый деитель напряжения .подключены к выходу управляемого следящего интегратора, соединенному с одним входом первого сумматора, выход которого подключен ко второму информационному входу управляемого интегратора, а другой вход первого сумматора подключен к выходу операционного усилителя, соединенному с первым входом ограничителя, выход которого соединен с третьим входом операционного усилителя, а второй вход ограничителя подключен к выходу второго сумматора, один вход которого непосредственно, а другой вход через второй делитель напряжения соединены с выходом блока формирования характеристики прочности преграды. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 2О5387, кл. G 06 Q 7/68, 1966. 2.Авторское свидетельство СССР № 438О24, кл. G Об Q 7/48, 1971.
Уп
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронная модель удара | 1971 |
|
SU438024A1 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Устройство для моделирования ударных систем | 1973 |
|
SU451102A1 |
| Устройство для моделирования м-фазного вентильного преобразователя | 1974 |
|
SU524200A1 |
| ЭЛЕКТРОННАЯ МОДЕЛЬ УДАРА | 1966 |
|
SU179104A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Устройство для измерения скорости | 1984 |
|
SU1255939A1 |