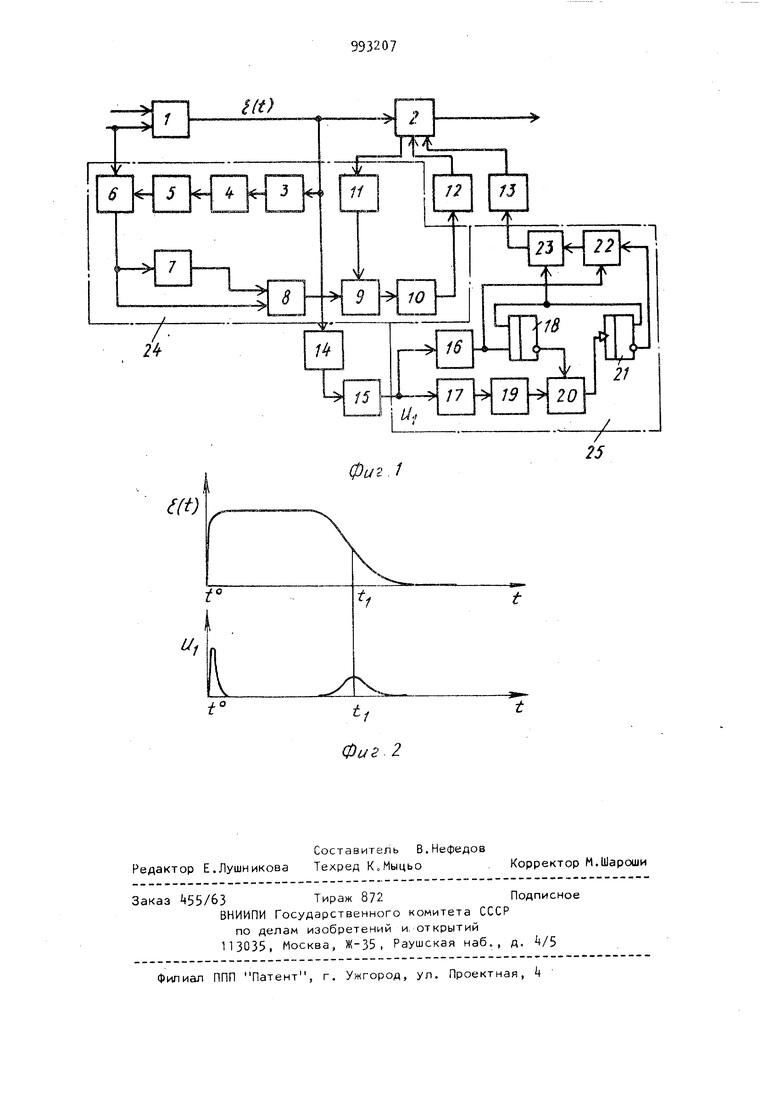
теЛьно соединенные второй пороговый элемент, первый триггер, второй ключ, второй .триггер, интегратор, третий ключ и последовательно соединенные третий пороговый элемент и второй формирователь, подключенный выходом к второму входу второго ключа, второй пороговый элемент подключен входом к выходу блока выделения модуля и к входу третьего порогового эле- о мента, а выходом - к второму входу интегратора, третий ключ соединен вторым входом с вторым входом первого триггера и с вторым выходом вто рого триггера, а выходом - с входом блока управления частотой квантования, вход блока синхронизации подклю чен к выходу широтно-импульсного мод лятора, а выход - к второму входу им пульсного элемента, второй вход вычислительного блока соединен с выхо дом Первого ключа, вход которого сое динен с входом сравнивающего элемен та, выход фиксатора пoдкл эчeн к вхо ду блока подстройки коэффициента ус ления, а вход первого порогового эл мента связан с выходом сравнивающего элемента. На фиг. 1 представлена структурная схема регулятора; на фиг, 2 - д аграммы, поясняющие работу устройст ва. Регулятор содержит сравнивающий элемент 1, широтно-импульсный модулятор 2, первый пороговый элемент 3, первый формирователь k, первый б 5 задержки, первый ключ 6, второй блок 7 задержки, вычислительный бло 8, импульсный элемент 9, фиксатор 1U, блок 11 синхронизации, блок 12 подстройки коэффициента усиления, блок 13 управления частотой квантования, дифференциатор , блок 15 в деления модуля, второй и третий пороговые элементы 16 и 17, первый триггер 18, второй формирователь 19 второй ключ 20, второй триггер 21, интегратор 22, третий ключ 23, блок 2 определения коэффициента усиления, блок 25 определения запаздывания . Регулятор работает следующим обр зом. Пусть в некоторый момент времени на первый вход элемента сравнения подан ступенчатый скачок, в результате чего появляется сигнал рас согласования E(t) (фиг. 2) и на выходё блока 15 выделения модуля появляются импульсы, соответствующие нарастанию и убыванию сигнала-рассогласования. Причем амплитуда первого импульса в несколько раз больше амплитуды второго импульса. Второй пороговый элемент 16 настроен таким образом, что через него может пройти только первый импульс, а третий пороговый элемент 17 пропускает оба импульса. Первый импульс, пройдя второй пороговый элемент 16, опрокидывает первый триггер 18, в результате чего второй ключ 20 открыт. Первый и второй импульсы, проходя через третий пороговый элемент 17, формирователь 19 и открытый второй ключ 20, поступают на счетный вход второго триггера 21. В момент прихода второго импульса t, триггеры 21 и 18 опрокидываются в первоначальное состояние, второй ключ 20 закрывается, а третий ключ 23 открывается. Таким образом, в интервале между импульсами на вход интегратора 22 подается постоянное напряжение с выхода второго триггера 21. Напряжение на выходе интегратора 22 в момент времени t t пропорционально величине запаздывания. Блок 13 по величине напряжения на своем входе, поступающего с выхода интегратора 22 через открытый третий ключ 23, производит перестройку частоты квантования модуля °Р В случае, когда сигнал рассогласования E(t) превосходит некоторый заданный уровень, что может быть вызвано изменением коэффициента усиления объекта, первый пороговый элемент 3 посылает сигнал на вход первого формирователя k, который вырабатывает импульс с длительностью, большей периода квантования модулятора Т. Сигнал с выхода первого формирователя 4 пройдя блок 5 с задерж ой..,, (максимальная величина запазТПиА1„дывания объектаj поступает на первый вход первого ключа 6. Сигнал с входа блока сравнения через открытый первый ключ 6 непосредственно и через блок 7 с задержкой О ) поступает на входы вычислительного блока 8, который вместе с импульсным элементом 9 и фиксатором (нулевого порядка) 10 осуществляет оценку коэффициента усиления объекта согласно заданным алгоритмам. Для объектов первого порядка общим алгоритмом работы блоков 8-10 может быть, например )-e °®x(tv,) -4/ToLtH e-ty j Mat где К - оценка коэффициента усиленияТд - постоянная времени объекта ty. - величина выходного сигнала объекта в момент , М - амплитуда импульса управления M const. Причем это выражение получено из уравнения динамики объекта с учетом того, что коэффициент усиления объекта медленно изменяется, и за время в- можно считать постоянным, в силу того, что при превышении сигналом рассогласования заданный уровень длительность импульсов на выходе модулятора большее. Алгоритм оценки коэффициента прост, так как знаменатель в выражении представляет собой постоянную величину. Для оценки коэффициента усиления по алгоритму тре буется, чтобы импульсный элемент 9 и широтно-импульсный модулятор 2 работали синхронно, причем фаза выходного сигнала импульсного элемента Э отстает от фазы выходного сигнала широтно-импульсного модулятора 2 на время 0. Блок 11 обеспечивает синхронную работу модулятора 2 и импульс ного элемента 9- Блок 12 подстройки по величине сигнала на своем входе производит перестройку коэффициента усиления модулятора. Таким образом, в блоках и 25 осуществляется идентификация- текущих параметров объекта. Этим обеспечивается корректировке коэффициента усиления и частоты квантования импульсного регулятора при отклонении их от оптимальных значений в направлении, противоположном этим отклонениям. Повышение точности регулирования достигается за счет обеспечения опти мальных параметров настройки при изменениях коэффициента усиления и вре мени запаздывания управляемого процесса. Формула изобретения Адаптивный импульсный регулятор для нестационарных объектов с запаздыванием, содержащий блок подстройки коэффициента усиления, последовательно соединенные сравнивающий элемент, дифференциатор, блок выделения модуля и последовательно соединенные блок управления частотой квантования и широтно-импульсный модулятор, второй вход которого подключен к выходу сравнивающего элемента, а третий вход - к выходу блока подстройки коэффициента усиления, отличающийся тем, что, с целью повышения точности егулятора , он содержит блок синхронизации, последовательно соединенные первый пороговый элемент, первый формирователь, пер- . вый блок задержки, первый ключ, второй блок задержки, вычислительный блок, импульсный элемент, фиксатор, последовательно соединенные второй пороговый элемент, первый триггер, второй ключ, второй триггер, интегратор, третий ключ и последовательно соединенные третий пороговой элемент и второй формирователь, подключенный выходом к второму входу второго ключа, второй пороговой элемент подключен входом к выходу блока выделения модуля и к входу третьего порогового элемента, а выходом - к второму входу интегратора, третий ключ соединенвторым входом с вторым входом первого триггера и с вторым выходом второго триггера, а выходом с входом блока управления частотой квантования, вход блока синхронизации подключен к выходу широтно-импульсного модулятора, а выход - к второму входу импульсного элемента, второй вход вычислительного блока соединен с выходом первого ключа, вход которого соединен с входом сравнивающего элемента, выход фиксатора подключен к входу блока подстройки коэффициента усиления, а вход первого порогового элемента связан с выходом сравнивающего элемента. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР it32i459, кл. G 05 В 13/02, 1976. 2.Авторское свидетельство СССР 802928, кл. G 05 В 13/02, 1980 (прототип).
фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования уровня воды на участке канала | 1986 |
|
SU1418407A1 |
| Устройство для регулирования уровня воды в канале | 1986 |
|
SU1348788A1 |
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
| Импульсный регулятор | 1977 |
|
SU732809A1 |
| Адаптивный регулятор | 1979 |
|
SU802928A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Устройство для цифровой записи-воспроизведения цифровой информации | 1990 |
|
SU1788521A1 |
| Устройство для регулирования уровня воды на участке оросительного канала | 1987 |
|
SU1569383A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
-да
Фиг. 2
