Изобретение относится к специали- эированньм средствам вычислительной техники и может быть использовано для согласованной фильтрации импульсных сигналов на фоне помех в системах передачи информации и многоканальных системах телемеханики и связи.
Целью изобретения является повы- шение точности фильтрации при воздействии низкочастотных помех.
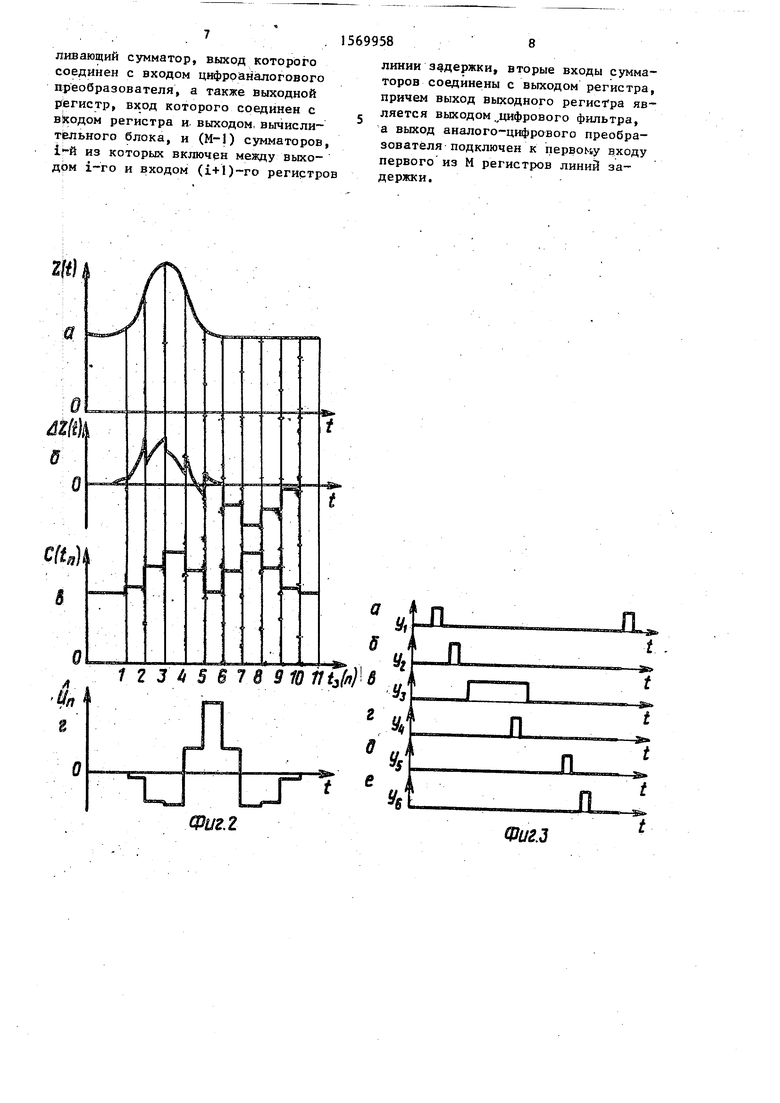
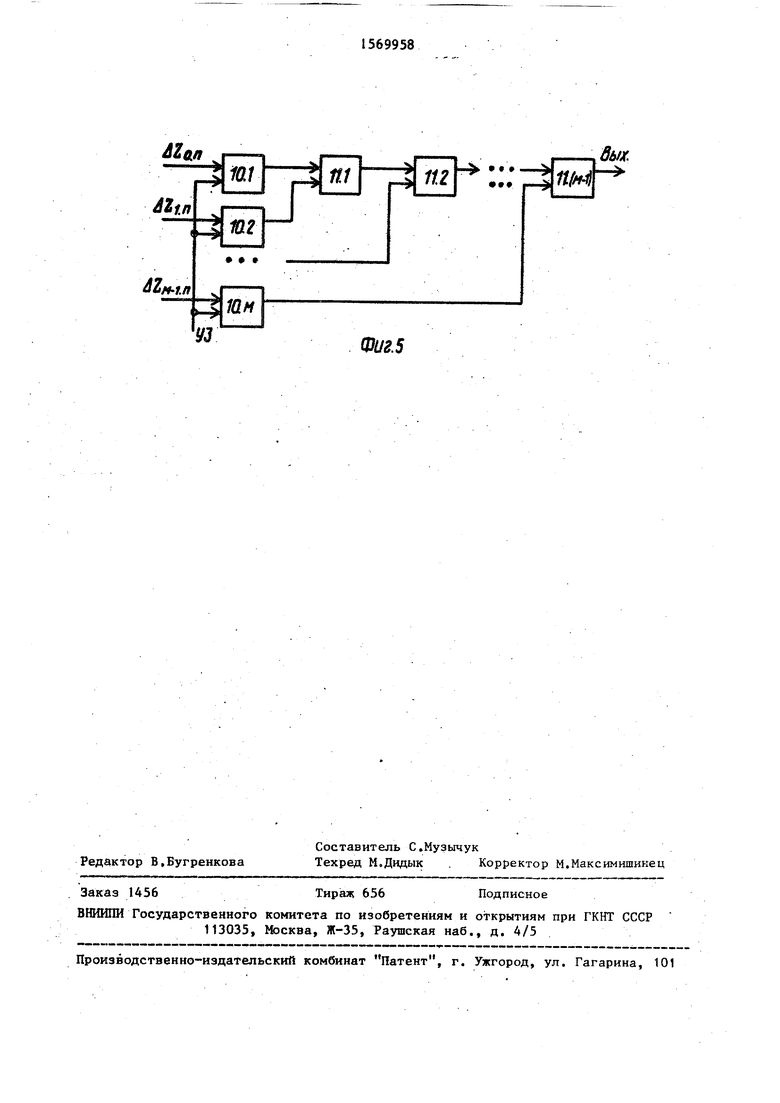
На фиг.I приведена структурная схема цифрового фильтра; на фиг.2-4 временные диаграммы, поясняющие его работу; на фиг.5 - структурная схема вычислительного блока.
Цифровой фильтр содержит аналоговый вычитатель 1, аналого-цифровой преобразователь (АЦП) 2, вычисли- тельный блок (ВБ) 3, регистр 4, накапливающий сумматор 5, выходной регистр 6, цифроаналоговый преобразователь (ЦАП) 7, регистры 8.1-8.М линии задержки, сумматоры 9.1-9(М-1) ВБ 3 содержит умножители .М и сумматоры 11.1-11.(М-1).АЦП 2 имеет К-разрядный выход, блоки 3, 4, 6, 8.1-8.М имеют также разрядность К. Так как медленно меняющая- ся помеха имеет диапазон изменений значительно больший, чем диапазон изменения полезного сигнала, то разрядность блоков 5 и 7 равна 1 К.
В основу предлагаемого техническо го решения положен двухканальный нерекурсивный цифровой фильтр, реализующий операции линейной свертки
f&Zn
(
где к...К -весо- вые коэффициенты. Первый канал такогюции операции липеммил иосуч п
ШС...С1К I
...Kib,Jbzn.M+1J
О
го фильтра вычисляет оценку Uy, импульсного сигнала, второй - оценку ДС - приращения помехи, которая используется для формирования оценки
помехи на п-такте.
-п - с
- С„.,+ ЬСП (2)
и компонент вектора наблюдений AZ
AZ.
ZM - С„(3)
т
- А
AZn.,- Z,.,.- .- ЛС„, ; ,
Огл.г- г„-г- Cn-5- &Ch-2- лс„.,и
Цифровой фильтр работает следующим образом.
Исходное состояние цифрового фильтра после завершения всех вычислений на (п-1)-такте. В выходном регистре 6 находится код оценки имА
и.
пульсного сигнала U(n., . В регистре 4 и накапливающем сумматоре 5 хранятся коды приращения помехи йС, и оценки помехи С „, соответственн На выходе ЦАП 7 действует аналоговы сигнал Сцр.,), соответствующей коду помехи С п, . В регистрах 8-8М хранятся коды компонент вектора наблюдний (3) на (п-1)-такте, а именно: в регистре 8.1 находится код величины
bZ
- Z
Л2„.7- и т.д.,
«.1 - V«-J регистре 8.2 n-г Сц-г
Zp-M
в регистре 8М лг.1
Z«-z п-э ЬСП
п-м
- С
П-М-1
- ЬС
-м
-6А«-1
-йС„.г . Б сумматорах 9.М-9(М-1) хранятся коды следующих разностей соответственно A(Zn. - ЛС„., „2,,., -С ц-, , & Z.j -4uC(,i Z п. 1 7 ( Zn-/W i Cn-i«
Справедливость этих тождеств следует из соотношений (2)
Сп-г V
С и-э + ЛС п.г +UC п-1
П-1
20. 25 30 - 35 ) 40
д
Совокупность кодовых комбинаций на выходах сумматоров 9.1-9 (М-1) образует вектор наблюдений (3) на n-такте без первой компоненты UZ. В сумматоре 11(М-1) ВБ 3 хранится код величины йб п, .
В момент времени th nT (Т - период дискретизации), когда выходной сигнал аналогового вычитателя 1 равен разности Z(tn) - C(tn-,), поступает тактовый импульс Y, (фиг.2а), АЦП 2 преобразует действующий на его входе сигнал Z(tR) - 6(tn ,) в код &Zn Z - Сп | . Синхроимпульсом осуществляется запись этого кода в регистр 8.1. Одновременно эти же импульсом в регистры 8.2-8.М записываются кодовые комбинации, хранящиеся в соответствующих сумматорах 9.1- 45 9 (М-1), образуют вектор наблюдений (3), используемый для вычисления оценок (1).
Вычисление оценки импульсного
M-J
сигнала U. « р
дится ВБ 3 после поступления на его
управляющий вход синхроимпульса Y (фиг.За,б,в). Описание работы ВБ 3 приводится ниже. Синхроимпульсом У. (фиг.Зг) код вычисленной оценки и„ записывается в выходной регистр 6.
Вычисление оценки приращения помехи А (1 К &Zn.
произво&СП
(с
U Z h , ос тг ествляется
о
51569958
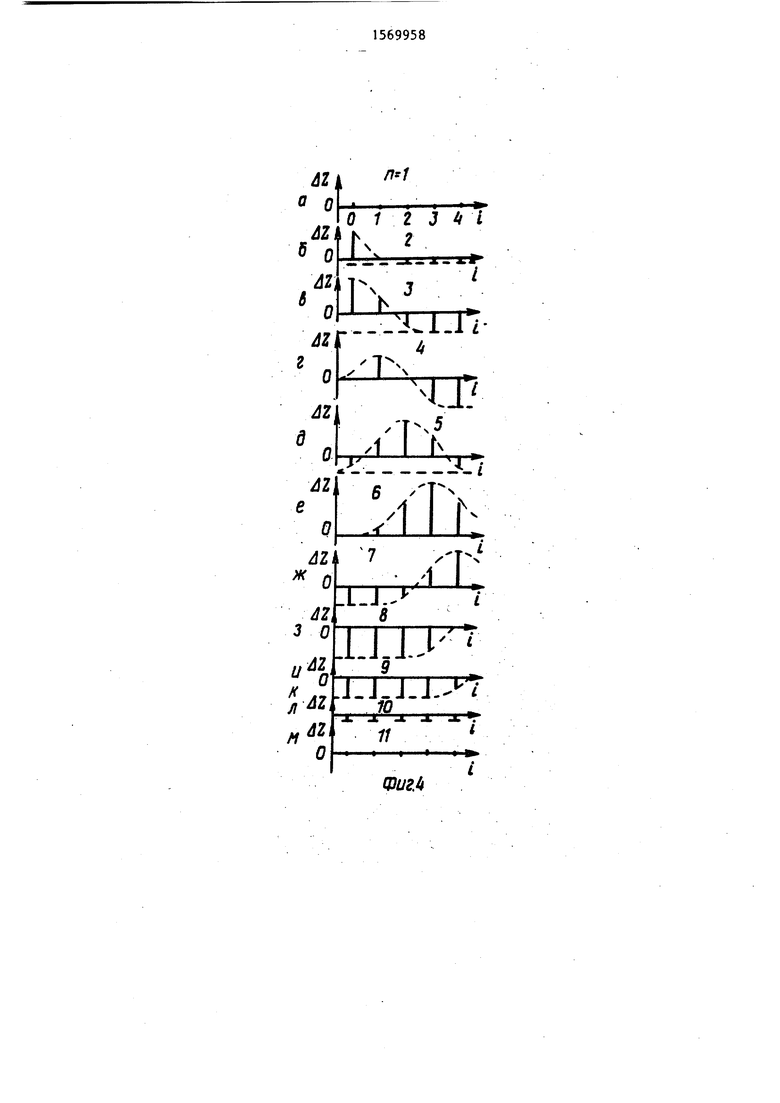
ВБ 3 после снятия с управляющего вхо- преобразуется в код iZt Z4 t(, кода синхроимпульса Y3(на управляющем торый записывается в регистр 8.1. Од- входе действует сигнал Лог. О). повременно кодовые комбинации сумматоров 9. L-9.4 переписываются в регистры 8.2-8.5. Выходы регистров 8.1- 8.5 образуют вектор наблюдений AZT« гг- C,Z,- С,- &С, - АС,- АС, (фиг.46), Этот процесс продолжается JQ до 11-го такта, в котором схема возвращается в исходное состояние (фиг.2а-г, 4 а-н).
Из фиг.2 и 4 видно, что фильтр, вычисляющий оценку Un импульсного сигнала, является оптимальным, поскольку его реакция на информационный импульс имеет характерный максимум, приходящийся на момент окончания импульса, Кроме этого, диапазон изменения сигнала на входе АЦП 2 не зависит от помехи C(t) и определяется только диапазоном изменения импульсного сигнала. Коэффициенты , Гк I (1) такого фильтра можно 25 рассчитать, используя метод наименьших квадратов,.
Функциональная схема вычислительного блока 3 (фиг.1) приведена на фиг.5. ВБ 3 состоит из М К-раэрядных умножителей 10,1-10.М на постоянный коэффициент и (М-1) сумматоров 11.1 - 11.(М-1). Каждый умножитель выполнен в виде постоянного программируемого запоминающего устройства (ППЗУ) с (К+1)-разрядным адресным входом и К-разрядным выходом. На первые К разрядов входа 1-го ППЗУ (,M) поступает число bZn.J, на (К+1)-й разряд - управляющий сигнал Y в за-
В этом режиме ВБ 2 находится до прихода следующего синхроимпульса YJ. Синхроимпульсом Y (фиг.Зд) код вычисленной оценки ЛСП записывается в регистр 4, что приводит к изменению кодовьк комбинаций в сумматорах 9.1-9 (М-1). В сумматоре 9.1 образуется разность UZh - ЛС„ Z „ - Сп в сумматоре 9.2 UZn., - ДС„ Z Пн - С„ и т.д. Таким образом, совокупность этих комбинаций образует неполный вектор наблюдений (3) на (п+1)-такте. Синхроимпульсом Yg (фиг.Зе) производится вычисление и запись оценки Сп (2) в накапливающем сумматоре 5. Код оценки помехи С(п) преобразуется ЦАП 7 в соответствующий аналоговый сигнал С (t), поступающий на первый вход аналогового вычитателя 1. Схема возвращается в исходное состояние.
Рассмотрим процесс формирования вектора наблюдений &Z (3) на каждом такте, привлекая для этого диаграммы, показанные на фиг.2а-г, 4 а-м. Память фильтра равна . За исходное состояние примем ситуацию, когда в наблюдаемом сигнале отсутствует информационный импульс, т.е. Z(t) C(t) (шум t (t) на диаграммах не показан). Предположим, что к этому моменту вычислена оценка помехи, равная помехе C(t,) C(t), Тогда, накапливающий сумматор 5 хранит код оценки помехи CQ, которому соответствует аналоговая величина C(tQ) на выходе ЦАП 7, В регистре 4 хранится код приращения помехи ДС 0, в регистрах 8.1-8,5 и сумматорах 9.1-9.4 хранятся нулевые кодовые комбинации, в выходном регистре 6 находится также нулевая кодовая комбинация U0 0, (фиг.2г).
При поступлении на вход фильтра информационного импульса Z(t) C(t) + TJ(t) АЦП 2 в такте 1 преобразует разность ДZ(t, ) Z (t() - - С (t0) в код AZ, который записывается в регистр 8.1 (фиг.2,- 4а). В этом такте на основании вектора наблюдения &Z лг,0Д1.Ол (фиг,4а) вычисляются оценки L,, UC(, С,, (фиг.2). В сумматоре 9.1 появляется код величины UZ , -UC, Zj- С,, в сумматорах 9.2-9.4 - коды UC,. В следующем такте разность UZ(t)
15
20
30
35
4Q
45
висимости от которого считывается код произведения K{wfiZn, (Y, l) или код К(( „, (Y,0).
Формула изобретения
Цифровой фильтр, содержащий вычислительный блок, М регистров линии задержки, выход i-ro из которых (,М) соединен с i-м входом вычис50 лительного блока, и последовательно соединенные цифроаналоговый преобразователь, аналоговый вычитательу второй вход которого является входом циф. рового фильтра, и аналого-цифровой пре-
55 образователь, отличающийся тем, что, с целью повышения точности фильтрации при воздействии низкочастотных помех, введены последовательно соединенные регистр и накап-
25
15
25
20
30
35
висимости от которого считывается код произведения K{wfiZn, (Y, l) или код К(( „, (Y,0).
Формула изобретения
Цифровой фильтр, содержащий вычислительный блок, М регистров линии задержки, выход i-ro из которых (,М) соединен с i-м входом вычислительного блока, и последовательно соединенные цифроаналоговый преобразователь, аналоговый вычитательу второй вход которого является входом циф. рового фильтра, и аналого-цифровой пре-
образователь, отличающийся тем, что, с целью повышения точности фильтрации при воздействии низкочастотных помех, введены последовательно соединенные регистр и накап-
ливающий сумматор, выход которого соединен с входом цнфроаналогового преобразователя, а также выходной регистр, вход которого соединен с входом регистра и выходом вычислительного блока, и (М-1) сумматоров, 1-й из которых включен между выходом 1-го и входом (i-H)-ro регистров
линии задержки, вторые входы сумматоров соединены с выходом регистра, причем выход выходного регистра является выходом „цифрового фильтра, а выход аналого-цифрового преобразователя подключен к первоь4у входу первого из М регистров линий задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 1994 |
|
RU2097921C1 |
| Цифровой согласованный фильтр | 1987 |
|
SU1503057A1 |
| Устройство для контроля аналоговых объектов | 1985 |
|
SU1288702A1 |
| Устройство для коррекции изображений | 1990 |
|
SU1725239A1 |
| Цифровой демодулятор сигналов с двухуровневой амплитудно-фазовой манипуляцией и относительной оценкой амплитуды символа | 2022 |
|
RU2790140C1 |
| Вычислительный преобразователь информации | 1985 |
|
SU1330642A1 |
| Устройство для контроля аналоговых объектов | 1986 |
|
SU1397941A1 |
| Процессор цифровой обработки сигналов | 1990 |
|
SU1789991A1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2022 |
|
RU2786159C1 |
| СПОСОБ ИНДЕНТИФИКАЦИИ ТОНАЛЬНЫХ СИГНАЛОВ В СЕТЯХ СВЯЗИ И ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2291405C2 |
Изобретение относится к вычислительной технике и может быть использовано для согласованной фильтрации импульсных сигналов на фоне помех в системах передачи информации. Цель изобретения - повышение точности фильтрации при воздействии низкочастотных помех. Цифровой фильтр (ЦФ) содержит аналоговый вычитатель 1, аналого-цифровой преобразователь (АЦП) 2, вычислительный блок (ВБ) 3, регистры 4 и 6, накапливающий сумматор 5, цифроаналоговый сумматор (ЦАП) 7, регистры 8.1 - 8.M линии задержки сумматоры 9.1 - 9(M- 1) АЦП 2, блоки 3, 4, 6, 8.1 - 8M имеют одинаковую разрядность K (разрядность блоков 5 и 7 равна L*98К, т.к. диапазон медленно меняющийся помехи больше диапазона полезного сигнала). Поставленная цель достигается введением регистра 4, накапливающего сумматора 5, регистра 6, (M - 1) сумматоров и их соединением с узлами ЦФ. В основу ЦФ положен двухканальный нерекурсивный фильтр, реализующий соответствующую операцию линейной свертки. Первый канал такого фильтра вычисляет оценку Uп импульсного сигнала второй канал - оценку ΔСп приращения помехи, которая используется для формирования оценки помехи на N тактов, и компонент вектора наблюдений ΔZ. 5 ил.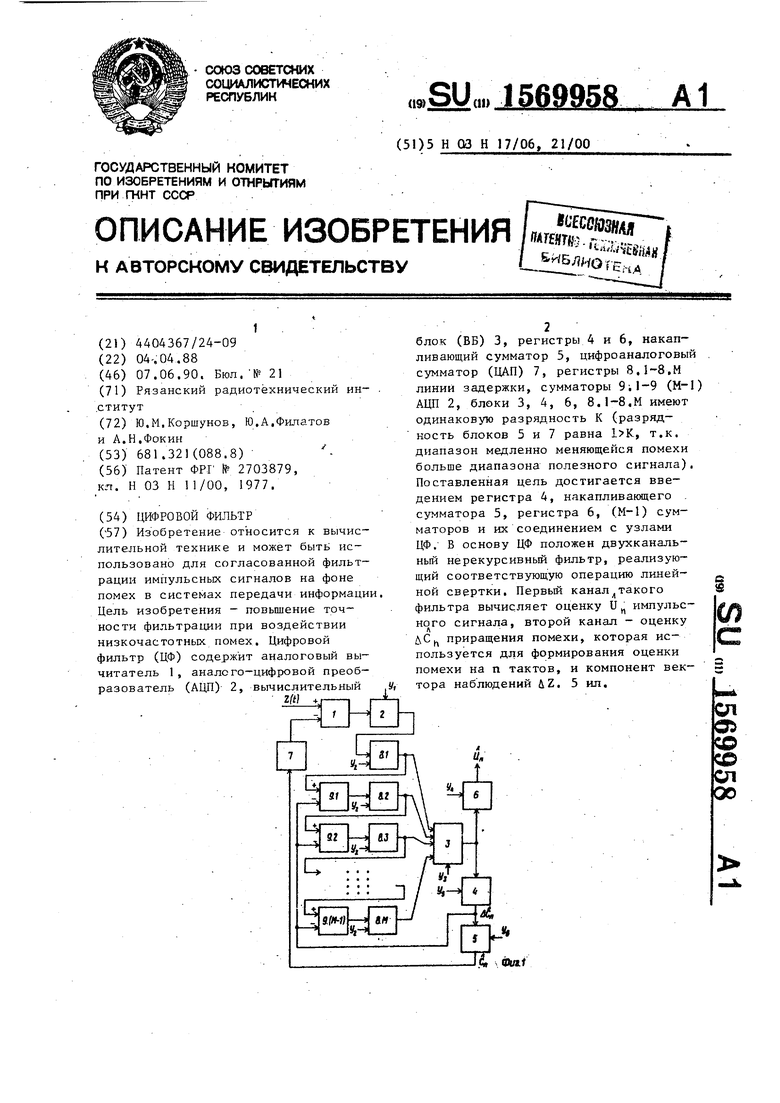
zMi
12345678 9101Н3(л) в
Фиг. 2
в
а 4
б %
г
V
УЗ
Редактор В.Бугренкова
Составитель С.Музычук
Техред М.Дидык Корректор М.Максимншинец
Заказ 1456
Тирад 656
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фиг.5
Подписное
