Изобретение относится к области авиационной техники, а именно к системам управления самолетом в продольном движении.
Применяемые в настоящее время системы дистанционного управления (СДУ) маневренными самолетами для предотвращения сваливания, штопора оснащаются ограничителями предельных режимов (ОПР) полета (Оболенский Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007 г., 480 с. с. 255, второй абзац снизу).
Примером активной системы ОПР является система ограничения угла атаки, использующая нелинейный элемент в цепи прохождения сигнала от ручки управления самолетом (РУС) на вход СДУ и предусматривающая уменьшение коэффициента передачи в два-три раза в зависимости от превышения допустимого угла атаки с учетом темпа его изменения (Вопросы автоматизации управления самолетами. Под редакцией чл.-корр. АН СССР Бюшгенса Г.С. Отраслевая библиотека «Технический прогресс и повышение квалификации» Министерства авиационной промышленности СССР, серия 5, 1978 г., 388 с, с. 144-145, фиг. 6.15). Ее недостаток связан со сложностью формирования закона изменения коэффициента передачи и потребного темпа изменения угла атаки в законе управления с целью обеспечения требуемых статических и динамических характеристик системы ОПР во всей области эксплуатации маневренных самолетов.
Известна система ОПР, применяемая на самолетах МиГ с механической проводкой управления, работающая на принципе принудительного увода РУС в сторону уменьшения угла атаки с помощью гидравлического толкателя (Оболенский Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007 г., 480 с. с. 256-257). Недостаток этого ОПР обусловлен тем, что «при пилотировании на допустимых углах атаки появляется так называемая «пила», когда ручка управления отталкивается, снова добирается «на себя», снова отталкивается и т.д.» (Оболенский Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007 г., 480 с. с. 259 третий абзац снизу).
Наиболее близкой к заявляемому к патентованию ОПР является система ограничения угла атаки, применяемая на самолетах МиГ-29М, МиГ-29К (Оболенский Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007 г., 480 с. с. 260, рис. 5.11). Принцип построения и особенности работы ОПР подробно рассмотрены в приведенном источнике на с. 260÷263.
Летная практика использования ОПР данной структуры на маневренных самолетах в условиях широкого диапазона изменения высот и скоростей полета выявила ее недостатки. В первую очередь они сводятся к трудностям обеспечения приемлемых качественных показателей совместной работы СДУ самолета и ОПР, а именно - в достижении приемлемого компромисса между быстродействием процессов выхода на заданный угол атаки и возникающим при этом перерегулировании. Обеспечение потребного быстродействия (в пределах 1,5 с при достижении уровня 70% от заданного угла атаки) вызывает на многих режимах полета существенное кратковременное превышение предельных значений угла атаки (перерегулирование) и, наоборот, устранение таких «забросов» по углу атаки с помощью ОПР затягивает время регулирования. Второй недостаток связан с тем, что у маневренных самолетов на больших углах атаки не обеспечиваются приемлемые угловые скорости вращения самолета по крену, в связи с чем необходимо снижение допустимых углов атаки при управлении креном. В прототипе подобная коррекция отсутствует. Еще один недостаток обусловлен требованиями летчиков о необходимости резервного (дополнительного) запаса по перемещению РУС от максимального значения с целью возможного превышения предельных углов атаки на определенную величину в критических ситуациях. В прототипе такой возможности при полностью взятой «на себя» РУС не имеется.
Целью изобретения является выполнение требований по быстродействию и перерегулированию процессов выхода самолета на предельно допустимый угол атаки, обеспечение коррекции (снижения) предельных углов атаки при управлении самолета по крену и возможности превышения допустимых углов атаки на определенную величину при предельном перемещении РУС.
Ожидаемый технический результат достигается тем, что ограничитель предельных режимов полета маневренного самолета содержит блок формирования допустимого угла атаки, блок формирования демпфирующих сигналов, блок формирования астатического контура ОПР, датчики угловой скорости тангажа, угла атаки, источник сигнала на входе рулевого привода, первый сумматор, первый вход которого соединен с выходом блока формирования допустимого угла атаки, второй - с выходом датчика угла атаки, первый вход блока формирования демпфирующих сигналов подключен к датчику угловой скорости тангажа, второй вход - к выходу датчика угла атаки, третий вход - к выходу первого сумматора, первый вход блока формирования астатического контура ОПР соединен с выходом блока формирования демпфирующих сигналов, второй вход - с выходом источника сигнала на входе рулевого привода, а выход блока формирования астатического контура ОПР является выходом ОПР.
Блок формирования допустимого угла атаки включает в себя датчик перемещения ручки (ДПР) управления самолетом по тангажу, датчик максимального значения перемещения РУС по тангажу, датчик обратного значения удвоенного максимального перемещения РУС, датчик предельного значения угла атаки самолета, второй и третий сумматоры, блок перемножения сигналов, первый вход которого соединен с выходом второго сумматора, а выход - с первым входом третьего сумматора, выход датчика заданного максимального значения перемещения РУС подключен к первому входу второго сумматора, отличающийся тем, что дополнительно содержит последовательно соединенные первый нелинейный блок и первый фильтр, выход которого подключен к второму входу второго сумматора, ДПР управления самолета по крену, четвертый сумматор, последовательно соединенные второй и третий нелинейные блоки, через которые выход ДПР управления самолета по крену подключен к первому инвертирующему входу четвертого сумматора, блок определения минимума двух сигналов, четвертый нелинейный блок, второй фильтр и блок ограничения скорости изменения сигнала, подключенные своими выходами к входам блока определения минимума двух сигналов, а своими входами - к выходу датчика предельного значения угла атаки самолета, выход блока определения минимума двух сигналов через четвертый нелинейный блок соединен с вторым входом четвертого сумматора, пятый нелинейный блок, выход четвертого сумматора подключен к второму инвертирующему входу третьего сумматора и через последовательно соединенные датчик обратного значения удвоенного максимального перемещения РУС и пятый нелинейный блок - к второму входу блока перемножения сигналов, шестой и седьмой нелинейные блоки, пятый и шестой сумматоры, выход третьего сумматора подключен к первым входам пятого и шестого сумматоров, выход ДПР управления самолетом по тангажу через шестой нелинейный блок соединен с вторым входом пятого сумматора, выход которого через седьмой нелинейный блок подключен к второму входу шестого сумматора, выход которого является выходом блока формирования допустимого угла атаки.
Блок формирования демпфирующих сигналов включает в себя третий и четвертый фильтры, первый, второй и третий масштабирующие блоки, седьмой и восьмой сумматоры, первый вход блока формирования демпфирующих сигналов соединен с входом третьего фильтра, выход которого подключен к входу первого масштабирующего блока, второй вход блока формирования демпфирующих сигналов через последовательно соединенные второй масштабирующий блок и четвертый фильтр подключен к первому входу седьмого сумматора, третий вход блока формирования демпфирующих сигналов соединен с вторым входом седьмого сумматора, выход третьего масштабирующего блока подключен к первому входу восьмого сумматора, выход которого является выходом блока формирования демпфирующих сигналов, отличающийся тем, что дополнительно содержит восьмой, девятый и десятый нелинейные блоки, выход первого масштабирующего блока через восьмой нелинейный блок соединен с входом девятого нелинейного блока, выход которого подключен к входу третьего масштабирующего блока и к третьему входу седьмого сумматора, выход седьмого сумматора через десятый нелинейный блок подключен к второму входу восьмого сумматора, третий вход которого соединен с вторым входом седьмого сумматора.
Блок формирования астатического контура ОПР включает в себя двухпозиционный ключ, нормально-замкнутый вход которого является входом блока формирования астатического контура ОПР, последовательно соединенные блок определения максимума двух сигналов, одиннадцатый нелинейный блок, четвертый масштабирующий блок и первый вход девятого сумматора, выход которого является выходом блока формирования астатического контура ОПР, инвертирующий блок, выход которого соединен с нормально-разомкнутым входом ключа и с первым входом блока определения максимума двух сигналов, второй вход которого подключен к выходу ключа, интегратор, блок логики, на первый вход которого подается сигнал с входа рулевого привода, вход интегратора подключен к выходу блока логики, отличающийся тем, что дополнительно содержит двенадцатый нелинейный блок, через который выход интегратора подключен к второму входу девятого сумматора, тринадцатый нелинейный блок, вход которого соединен с выходом одиннадцатого нелинейного блока, а выход - с вторым входом блока логики, пятый фильтр, выход которого соединен с входом инвертирующего блока, а вход - с выходом девятого сумматора.
Сущность изобретения поясняется графическими изображениями:
на фиг. 1 представлена обобщенная структурная схема ОПР;
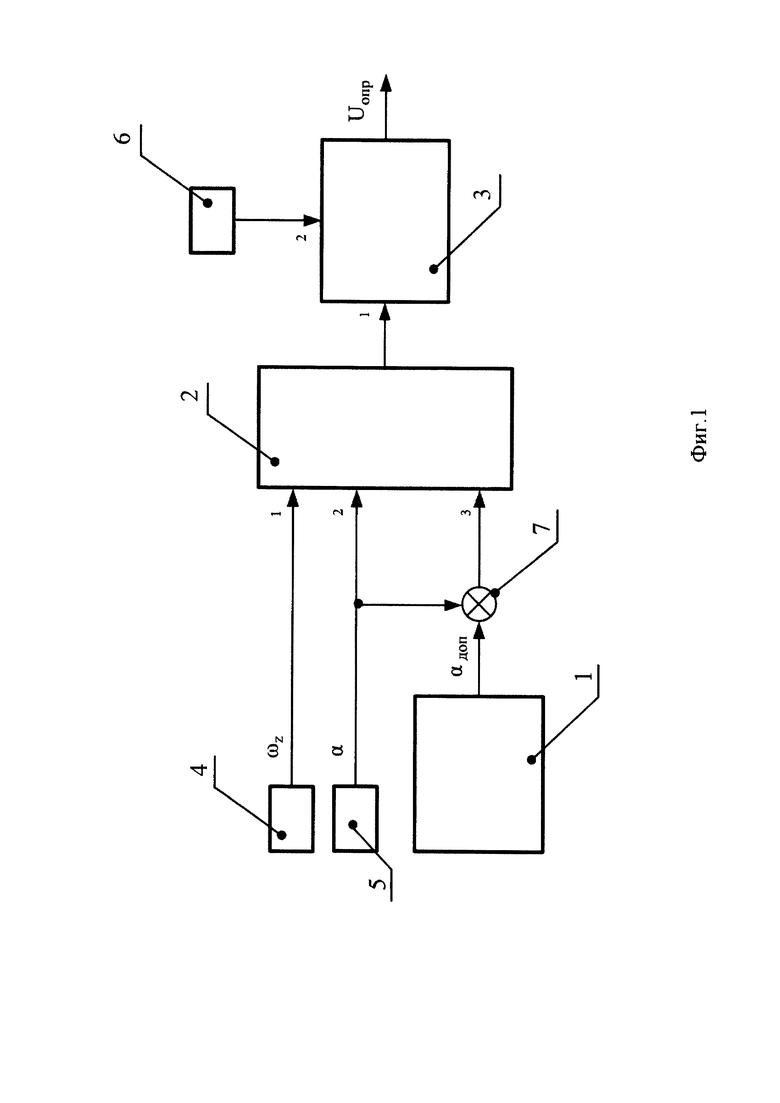
на фиг. 2 изображен блок формирования допустимого угла атаки;
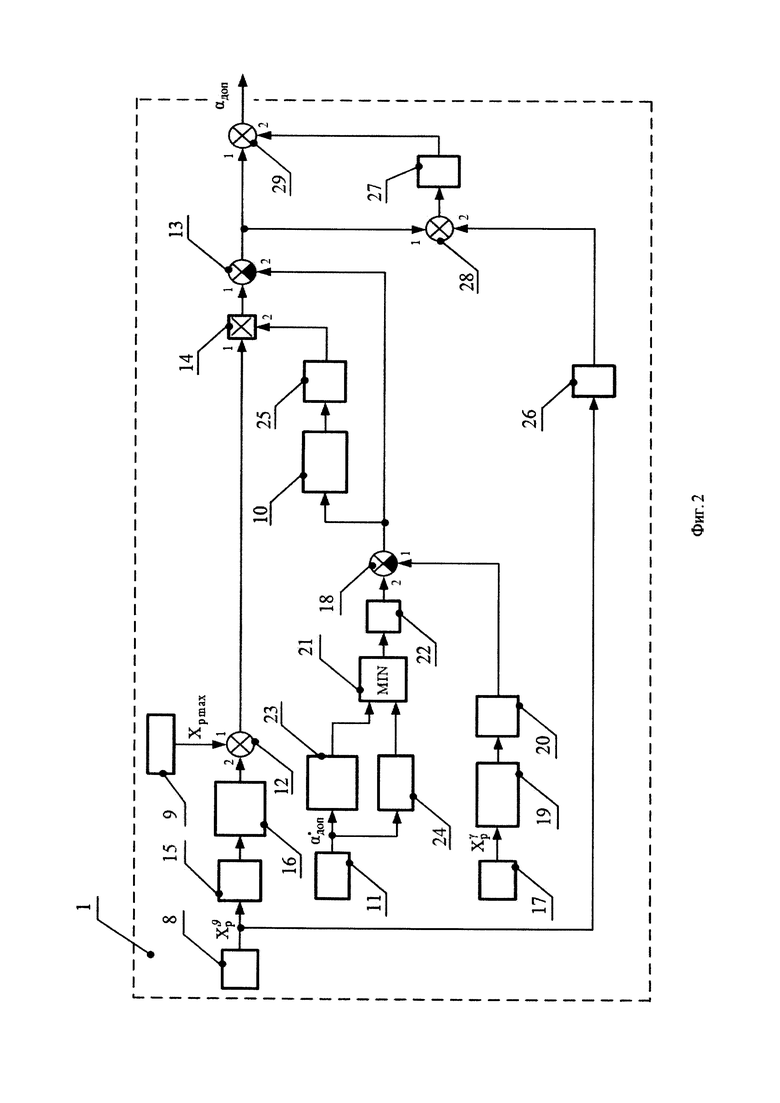
на фиг. 3 показан блок формирования демпфирующих сигналов;
на фиг. 4 представлен блок формирования астатического контура ОПР;
на фиг. 5 представлены варианты реализации нелинейных блоков;
на фиг. 6 изображены границы изменения допустимых углов атаки в зависимости от перемещения ручки управления самолетом;
на фиг. 7 изображена структурная схема прототипа;
на фиг. 8 показана структурная схема аналога (Вопросы автоматизации управления самолетами. Под редакцией чл.-корр. АН СССР Бюшгенса Г.С. Отраслевая библиотека «Технический прогресс и повышение квалификации» Министерства авиационной промышленности СССР, серия 5, 1978 г., 388 с, с. 144-145, фиг. 6.15).
На фиг.1÷8 использованы следующие обозначения:
ωz - угловая скорость тангажа;
α - угол атаки;
М - число Маха;
Рст - статическое давление атмосферы;
qдин - динамический скоростной напор;
Н - высота полета;
 - допустимый угол атаки, формируемый системой ограничения сигналов (СОС);
- допустимый угол атаки, формируемый системой ограничения сигналов (СОС);
Uoпp - сигнал на выходе ОПР, поступающий на вход рулевого привода;
Uвx pп - сигнал на входе рулевого привода СДУ;
 - перемещение РУС по тангажу;
- перемещение РУС по тангажу;
 - перемещение РУС по крену;
- перемещение РУС по крену;
Хр max - максимальное значение перемещения РУС по тангажу;
αдоп - допустимый угол атаки, формируемый системой ОПР;
MIN- логический блок выделения минимума из двух сигналов;
Δα=(α+αдоп);
МАХ - логический блок выделения максимума из двух сигналов;
"Отключение ОПР" - сигнал отключения ОПР летчиком;
1 - блок формирования допустимого угла атаки;
2 - блок формирования демпфирующих сигналов;
3 - блок формирования астатического контура ОПР;
4 - датчик угловой скорости тангажа;
5 - датчик угла атаки;
6 - источник сигнала на входе рулевого привода;
7 - первый сумматор;
8 - ДПР управления самолетом по тангажу;
9 - датчик максимального значения перемещения РУС по тангажу;
10 - датчик обратного значения удвоенного максимального перемещения РУС (Хр max);
11 - датчик предельного значения угла атаки;
12, 13 - второй и третий сумматоры соответственно;
14 - блок перемножения сигналов;
15 - первый нелинейный блок;
16 - первый фильтр;
17 - ДПР по крену;
18 - четвертый сумматор;
19, 20 - второй и третий нелинейные блоки;
21 - блок определения минимума двух сигналов;
22 - четвертый нелинейный блок;
23 - второй фильтр;
24 - блок ограничения скорости изменения входного сигнала;
25, 26, 27 - пятый, шестой и седьмой нелинейные блоки соответственно;
28, 29 - пятый и шестой сумматоры соответственно;
30, 31 - третий и четвертый фильтры соответственно;
32, 33, 34 - первый, второй и третий масштабирующие блоки соответственно;
35, 36 - седьмой и восьмой сумматоры соответственно;
37, 38, 39 - восьмой, девятый и десятый нелинейные блоки соответственно;
40 - двухпозиционный ключ;
41 - блок определения максимума двух сигналов;
42 - одиннадцатый нелинейный блок;
43 - четвертый масштабирующий блок;
44 - девятый сумматор;
45 -инвертирующий блок;
46 - интегратор;
47 - блок логики;
48, 49 - двенадцатый и тринадцатый нелинейные блоки соответственно;
50 - пятый фильтр.
Заявляемый к патентованию ОПР содержит (фиг. 1) блок 1 формирования допустимого угла атаки, блок 2 формирования демпфирующих сигналов, блок 3 формирования астатического контура ОПР, датчики 4 и 5 угловой скорости тангажа и угла атаки, источник сигнала на входе рулевого привода 6, первый сумматор 7, первый вход которого соединен с выходом блока 1 формирования допустимого угла атаки, второй - с выходом датчика угла атаки 5, первый вход блока 2 формирования демпфирующих сигналов подключен к датчику угловой скорости тангажа 4, второй вход - к выходу датчика угла атаки 5, третий вход - к выходу первого сумматора 7, первый вход блока 3 формирования астатического контура ОПР соединен с выходом блока 2 формирования демпфирующих сигналов, второй вход - с выходом источника сигнала на входе рулевого привода 6, а выход блока 3 формирования астатического контура ОПР является выходом ОПР, сигнал которого поступает на вход рулевого привода самолета.
Блок 1 формирования допустимого угла атаки (фиг. 2) включает в себя датчик 8 перемещения ручки управления самолетом по тангажу, датчик 9 заданного максимального значения перемещения РУС, датчик 10 обратного значения удвоенного максимального перемещения РУС, датчик 11 предельного значения угла атаки самолета, второй 12 и третий 13 сумматоры, первый блок 14 перемножения сигналов, первый вход которого соединен с выходом второго сумматора 12, а выход - с первым входом третьего сумматора 13, выход датчика 9 заданного максимального значения перемещения РУС подключен к первому входу второго сумматора 12, отличающийся тем, что дополнительно содержит последовательно соединенные первый нелинейный блок 15 и первый фильтр 16, выход которого подключен к второму входу второго сумматора 12, ДПР 17 по крену, четвертый сумматор 18, последовательно соединенные второй 19 и третий 20 нелинейные блоки, через которые выход ДПР 17 по крену подключен к первому инвертирующему входу четвертого сумматора 18, блок 21 определения минимума двух сигналов, четвертый нелинейный блок 22, второй фильтр 23 и блок 24 ограничения скорости изменения сигнала, подключенные своими выходами к входам блока 21 определения минимума двух сигналов, а своими входами - к выходу датчика 11 предельного значения угла атаки самолета, выход блока 21 определения минимума двух сигналов через четвертый нелинейный блок 22 соединен с вторым входом четвертого сумматора 18, пятый нелинейный блок 25, выход четвертого сумматора 18 подключен к второму инвертирующему входу третьего сумматора 13 и через последовательно соединенные датчик 10 обратного значения удвоенного максимального перемещения РУС и пятый нелинейный блок 25 - к второму входу блока 14 перемножения сигналов, шестой 26 и седьмой 27 нелинейные блоки, пятый 28 и шестой 29 сумматоры, выход третьего сумматора 13 подключен к первым входам пятого 28 и шестого 29 сумматоров, выход ДПР 8 управления самолетом по тангажу через шестой нелинейный блок 26 соединен с вторым входом пятого сумматора 28, выход которого через седьмой нелинейный блок 27 подключен к второму входу шестого сумматора 29, выход которого является выходом блока 1 формирования допустимого угла атаки.
Блок 2 формирования демпфирующих сигналов (фиг. 3) включает в себя третий 30 и четвертый 31 фильтры, первый 32, второй 33 и третий 34 масштабирующие блоки, седьмой 35 и восьмой 36 сумматоры, первый вход блока 2 формирования демпфирующих сигналов соединен с входом третьего фильтра 30, выход которого подключен к входу первого масштабирующего блока 32, второй вход блока 2 формирования демпфирующих сигналов через последовательно соединенные второй масштабирующий блок 33 и четвертый фильтр 31 подключен к первому входу седьмого сумматора 35, третий вход блока 2 формирования демпфирующих сигналов соединен с вторым входом седьмого сумматора 35, выход третьего масштабирующего блока 34 подключен к первому входу восьмого сумматора 36, выход которого является выходом блока 2 формирования демпфирующих сигналов, отличающийся тем, что дополнительно содержит восьмой 37, девятый 38 и десятый 39 нелинейные блоки, выход первого масштабирующего блока 32 через восьмой нелинейный блок 37 соединен с входом девятого нелинейного блока 38, выход которого подключен к входу третьего масштабирующего блока 34 и к третьему входу седьмого сумматора 35, выход седьмого сумматора 35 через десятый нелинейный блок 39 подключен к второму входу восьмого сумматора 36, третий вход которого соединен с вторым входом седьмого сумматора 35.
Блок 3 формирования астатического контура ОПР (фиг. 4) включает в себя двухпозиционный ключ 40, нормально-замкнутый вход которого является входом блока 3 формирования астатического контура ОПР, последовательно соединенные блок 41 определения максимума двух сигналов, одиннадцатый нелинейный блок 42, четвертый масштабирующий блок 43 и первый вход девятого сумматора 44, выход которого является выходом блока 3 формирования астатического контура ОПР, инвертирующий блок 45, выход которого соединен с нормально-разомкнутым входом ключа 40 и с первым входом блока 41 определения максимума двух сигналов, второй вход которого подключен к выходу ключа 40, интегратор 46, блок логики 47, на первый вход которого подается сигнал с входа рулевого привода, вход интегратора 46 подключен к выходу блока логики 47, отличающийся тем, что дополнительно содержит двенадцатый нелинейный блок 48, через который выход интегратора 46 подключен к второму входу девятого сумматора 44, тринадцатый нелинейный блок 49, вход которого соединен с выходом одиннадцатого нелинейного блока 42, а выход - с вторым входом блока логики 47, пятый фильтр 50, выход которого соединен с входом инвертирующего блока 45, а вход - с выходом девятого сумматора 44.
На фиг. 7 представлена схема прототипа предполагаемого изобретения (Оболенский Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007 г., 480 с. с. 260, рис. 5.11), на которой выделены основные блоки формирования сигналов в ОПР.
Назначение и функционирование блока 1 формирования допустимого угла атаки (фиг. 2) такие же, как в прототипе (фиг. 7). Существенными отличительными признаками блока 1 являются:
1. С помощью ДПР 17 и нелинейных блоков 19, 20 осуществляется коррекция допустимого угла атаки αдоп в сторону его уменьшения при управлении креном. В зависимости от величины перемещение РУС по крену  на выходе блока 19 формируется сигнал, на величину которого понижается допустимый угол атаки αдоп. За счет уменьшения текущего угла атаки обеспечиваются достаточные на практике угловые скорости вращения по крену. Коррекция αдоп начинается с определенного значения сигнала , формируемого СОС, и осуществляется далее по линейному закону до максимального значения сигнала , предварительно назначенного в блоке 20. Пример реализации нелинейных блоков 19 и 20 показан на фиг. 5.
на выходе блока 19 формируется сигнал, на величину которого понижается допустимый угол атаки αдоп. За счет уменьшения текущего угла атаки обеспечиваются достаточные на практике угловые скорости вращения по крену. Коррекция αдоп начинается с определенного значения сигнала , формируемого СОС, и осуществляется далее по линейному закону до максимального значения сигнала , предварительно назначенного в блоке 20. Пример реализации нелинейных блоков 19 и 20 показан на фиг. 5.
2. Фильтр 23, блок 24 ограничения скорости изменения входного сигнала и блок логики 21 препятствуют возможному скачкообразному изменению сигнала  с выхода датчика 11 предельного значения угла атаки, формируемого системой ограничения сигналов (СОС) ОПР. С помощью нелинейного блока 22 сигнал
с выхода датчика 11 предельного значения угла атаки, формируемого системой ограничения сигналов (СОС) ОПР. С помощью нелинейного блока 22 сигнал  ограничивается на уровне, соответствующем максимальному значению перемещения РУС.
ограничивается на уровне, соответствующем максимальному значению перемещения РУС.
В реализованном на практике ОПР принято  при предельном перемещении РУС на 140 мм
при предельном перемещении РУС на 140 мм  а уровень ограничения в нелинейном блоке 11 равен 26° (фиг. 5), что соответствует максимальному перемещению РУС на 120 мм
а уровень ограничения в нелинейном блоке 11 равен 26° (фиг. 5), что соответствует максимальному перемещению РУС на 120 мм  За счет разницы между
За счет разницы между  и уровнем ограничения 26° в нелинейном блоке 11 летчику предоставляется возможность дополнительно перемещать («перетягивать») РУС на 20 мм и выводить самолет дополнительно на 2° при возникновении критических ситуаций. Этой же цели служат нелинейные блоки 26 и 27 (фиг. 5).
и уровнем ограничения 26° в нелинейном блоке 11 летчику предоставляется возможность дополнительно перемещать («перетягивать») РУС на 20 мм и выводить самолет дополнительно на 2° при возникновении критических ситуаций. Этой же цели служат нелинейные блоки 26 и 27 (фиг. 5).
3. С помощью нелинейного блока 15 ограничивается перемещение РУС на уровне 120 мм «на себя» и не пропускается положительный сигнал с ДПР 8 при перемещении РУС «от себя». Фильтр 16 предназначен для подавления помех в сигнале с выхода ДПР.
4. Сигнал на выходе датчика 9 соответствует максимальному перемещению РУС и составляет 120 мм; сигнал на выходе блока 10 соответствует значению 
5. Коэффициент передачи сигнала с выхода блока 10 на второй вход блока 14 перемножения сигналов, реализованный в нелинейном блоке 25, зависит от текущего значения сигнала , поступающего с выхода блока 11. График изменения этого коэффициента представлен на фиг. 5.
6. При нахождении РУС в положении «на себя» в пределах (-120 мм÷0 мм) при условии, что  когда коэффициент передачи в нелинейном блоке 25 равен 1, сигнал αдоп на выходе блока 1 формирования допустимого угла атаки имеет вид
когда коэффициент передачи в нелинейном блоке 25 равен 1, сигнал αдоп на выходе блока 1 формирования допустимого угла атаки имеет вид

График изменения αдоп от Хрус для этого случая представлен на фиг. 6, линия 1.
7. При нахождении РУС в положении «на себя» в пределах (-120 мм÷0 мм) при условии, что  когда коэффициент передачи в нелинейном блоке 25 равен 0,4, сигнал αдоп на выходе блока 1 формирования допустимого угла атаки имеет вид
когда коэффициент передачи в нелинейном блоке 25 равен 0,4, сигнал αдоп на выходе блока 1 формирования допустимого угла атаки имеет вид

График изменения αдоп от Хрус в этом случае представлен на фиг. 6, линия 2.
Уменьшение коэффициента передачи в нелинейном блоке 25 с 1,0 до 0,4 связано с необходимостью повышения градиента перемещения РУС по углу атаки при 
8. В случае критических ситуаций, когда предельное отклонение РУС летчиком «на себя» дополнительно увеличивается на 20 мм  сигнал на выходе сумматора 12 становится равен нулю, обнуляется сигнал на выходе блока 14 перемножения сигналов. На выходе сумматора 13 формируется сигнал, равный
сигнал на выходе сумматора 12 становится равен нулю, обнуляется сигнал на выходе блока 14 перемножения сигналов. На выходе сумматора 13 формируется сигнал, равный 
 а на выходе сумматора 29 к этому сигналу через нелинейный блок 26, сумматор 28 и нелинейный блок 27 добавляется сигнал, равный -2°. Тем самым допустимый угол атаки увеличивается на 2°.
а на выходе сумматора 29 к этому сигналу через нелинейный блок 26, сумматор 28 и нелинейный блок 27 добавляется сигнал, равный -2°. Тем самым допустимый угол атаки увеличивается на 2°.
Таким образом, в блоке 1 формирования допустимого угла атаки обеспечивается коррекция предельных углов атаки при управлении самолета по крену. Летчику в критических ситуациях предоставляется возможность превышения допустимых углов атаки при предельном перемещении РУС.
В блоке 2 формирования демпфирующих сигналов (фиг. 3) используются сигналы дифференцирования угловой скорости тангажа ωz и угла атаки α с помощью соответственно фильтров 30 и 31, а также сигнал Δα=(α+αдоп). Существенными отличительными признаками блока 2 формирования демпфирующих сигналов по сравнению с прототипом (фиг. 7) являются дополнительная коррекция коэффициентов передачи масштабирующих блоков 32, 33 и 34 с помощью нелинейных блоков 37, 38 и 39:
1. В цепь формирования демпфирующего сигнала (на выходе сумматора 36) в тракт прохождения сигнала производной  дополнительно включены последовательно соединенные нелинейные блоки 37, 38 и 39. Коэффициент передачи нелинейного блока 37 корректируется по сигналам текущей высоты и динамического скоростного напора (фиг. 5), коэффициент передачи нелинейного блока 39 изменяется в зависимости от текущего значения динамического скоростного напора (фиг. 5), величина коэффициента передачи нелинейного блока 38 изменяется в зависимости от знака входного сигнала.
дополнительно включены последовательно соединенные нелинейные блоки 37, 38 и 39. Коэффициент передачи нелинейного блока 37 корректируется по сигналам текущей высоты и динамического скоростного напора (фиг. 5), коэффициент передачи нелинейного блока 39 изменяется в зависимости от текущего значения динамического скоростного напора (фиг. 5), величина коэффициента передачи нелинейного блока 38 изменяется в зависимости от знака входного сигнала.
2. Нелинейный блок 39 дополнительно задействован также в канале прохождения сигнала производной  при формировании демпфирующего сигнала на выходе сумматора 36.
при формировании демпфирующего сигнала на выходе сумматора 36.
3. В цепь формирования демпфирующего сигнала на выход сумматора 36 введена прямая связь по сигналу Δα.
Использование указанных блоков и связей между ними обеспечивает улучшение динамических характеристик процессов ограничения предельных углов атаки самолета.
Введение в блок 3 формирования астатического контура ОПР фильтра 50 и нелинейных блоков 49, 48 также направлено на улучшение статических и динамических характеристик ОПР. В блоке 49 производится изменение коэффициентов передачи в цепи интегратора 46 в зависимости от числа М и высоты полета (фиг. 5), а в блоках 48 и 48а - в зависимости от 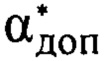 и Рст (фиг. 5). С помощью блока логики 47 интегратор 46 включается в работу при условии Uвx min≤Uвx pп≤Uвx max, т.е. когда сигнал на входе рулевого привода находится в рамках допустимых границ изменения. При нарушении этого условия процесс интегрирования блокируется.
и Рст (фиг. 5). С помощью блока логики 47 интегратор 46 включается в работу при условии Uвx min≤Uвx pп≤Uвx max, т.е. когда сигнал на входе рулевого привода находится в рамках допустимых границ изменения. При нарушении этого условия процесс интегрирования блокируется.
Предлагаемый к патентованию ОПР прошел натурную апробацию, получил положительную оценку летчиков и рекомендован к практическому использованию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ НАБОРЕ И СТАБИЛИЗАЦИИ ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА | 2016 |
|
RU2619793C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |





Ограничитель предельных режимов (ОПР) полета маневренного самолета содержит блок формирования допустимого угла атаки, блок формирования демпфирующих сигналов, блок формирования астатического контура ОПР, датчики угловой скорости тангажа, датчик угла атаки, источник сигнала на входе рулевого привода, сумматор, соединенные определенным образом. Обеспечивается требуемое быстродействие и перерегулирование процессов выхода самолета на предельно допустимый угол атаки, коррекция угла атаки при управлении по крену, возможность превышения предельно допустимого угла атаки на определенную величину. 4 з.п. ф-лы, 8 ил.
1. Ограничитель предельных режимов (ОПР) полета маневренного самолета, содержащий блок формирования допустимого угла атаки, блок формирования демпфирующих сигналов, блок формирования астатического контура ОПР, датчики угловой скорости тангажа, датчик угла атаки, источник сигнала на входе рулевого привода, первый сумматор, первый вход которого соединен с выходом блока формирования допустимого угла атаки, второй - с выходом датчика угла атаки, первый вход блока формирования демпфирующих сигналов подключен к датчику угловой скорости тангажа, второй вход - к выходу датчика угла атаки, третий вход - к выходу первого сумматора, первый вход блока формирования астатического контура ОПР соединен с выходом блока формирования демпфирующих сигналов, второй вход - с выходом датчика сигнала на входе рулевого привода, а выход блока формирования астатического контура ОПР является выходом ОПР.
2. Ограничитель предельных режимов по п. 1, отличающийся тем, что блок формирования допустимого угла атаки включает в себя датчик перемещения ручки (ДПР) управления самолетом по тангажу, датчик максимального значения перемещения ручки управления самолетом (РУС) по тангажу, датчик обратного значения удвоенного максимального перемещения РУС, датчик предельного значения угла атаки самолета, второй и третий сумматоры, блок перемножения сигналов, первый вход которого соединен с выходом второго сумматора, а выход - с первым входом третьего сумматора, выход датчика заданного максимального значения перемещения РУС подключен к первому входу второго сумматора, отличающийся тем, что дополнительно содержит последовательно соединенные первый нелинейный блок и первый фильтр, выход которого подключен ко второму входу второго сумматора, ДПР по крену, четвертый сумматор, последовательно соединенные второй и третий нелинейные блоки, через которые выход ДПР по крену подключен к первому инвертирующему входу четвертого сумматора, блок определения минимума двух сигналов, четвертый нелинейный блок, второй фильтр и блок ограничения скорости изменения сигнала, подключенные своими выходами к входам блока определения минимума двух сигналов, а своими входами - к выходу датчика предельного значения угла атаки самолета, выход блока определения минимума двух сигналов через четвертый нелинейный блок соединен со вторым входом четвертого сумматора, пятый нелинейный блок, выход четвертого сумматора подключен ко второму инвертирующему входу третьего сумматора и через последовательно соединенные датчик обратного значения удвоенного максимального перемещения РУС и пятый нелинейный блок - ко второму входу блока перемножения сигналов, шестой и седьмой нелинейные блоки, пятый и шестой сумматоры, выход третьего сумматора подключен к первым входам пятого и шестого сумматоров, выход ДПР управления самолетом по тангажу через шестой нелинейный блок соединен со вторым входом пятого сумматора, выход которого через седьмой нелинейный блок подключен ко второму входу шестого сумматора, выход которого является выходом блока формирования допустимого угла атаки.
3. Ограничитель предельных режимов по п. 1, отличающийся тем, что блок формирования демпфирующих сигналов включает в себя третий и четвертый фильтры, первый, второй и третий масштабирующие блоки, седьмой и восьмой сумматоры, первый вход блока формирования демпфирующих сигналов соединен с входом третьего фильтра, выход которого подключен к входу первого масштабирующего блока, второй вход блока формирования демпфирующих сигналов через последовательно соединенные второй масштабирующий блок и четвертый фильтр подключен к первому входу седьмого сумматора, третий вход блока формирования демпфирующих сигналов соединен со вторым входом седьмого сумматора, выход третьего масштабирующего блока подключен к первому входу восьмого сумматора, выход которого является выходом блока формирования демпфирующих сигналов, отличающийся тем, что дополнительно содержит восьмой, девятый и десятый нелинейные блоки, выход первого масштабирующего блока через восьмой нелинейный блок соединен с входом девятого нелинейного блока, выход которого подключен к входу третьего масштабирующего блока и к третьему входу седьмого сумматора, выход седьмого сумматора через десятый нелинейный блок подключен ко второму входу восьмого сумматора, третий вход которого соединен со вторым входом седьмого сумматора.
4. Ограничитель предельных режимов по п. 1, отличающийся тем, что блок формирования астатического контура ОПР включает в себя двухпозиционный ключ, нормально-замкнутый вход которого является входом блока формирования астатического контура ОПР, последовательно соединенные блок определения максимума двух сигналов, одиннадцатый нелинейный блок, четвертый масштабирующий блок и первый вход девятого сумматора, выход которого является выходом блока формирования астатического контура ОПР, инвертирующий блок, выход которого соединен с нормально-разомкнутым входом ключа и с первым входом блока определения максимума двух сигналов, второй вход которого подключен к выходу ключа, интегратор, блок логики, на первый вход которого подается сигнал с входа рулевого привода, вход интегратора подключен к выходу блока логики, отличающийся тем, что дополнительно содержит двенадцатый нелинейный блок, через который выход интегратора подключен ко второму входу девятого сумматора, тринадцатый нелинейный блок, вход которого соединен с выходом одиннадцатого нелинейного блока, а выход - со вторым входом блока логики, пятый фильтр, выход которого соединен с входом инвертирующего блока, а вход - с выходом девятого сумматора.
5. Ограничитель предельных режимов по п. 4, отличающийся тем, что блок логики при Uвx min≤Uвх рп≤Uвх max подключает на вход интегратора сигнал с выхода двенадцатого нелинейного блока, при Uвx pп>Uвх max на вход интегратора подключается сигнал, равный -(Uвx pп-Uвx max), при Uвх pп<Uвх min на вход интегратора подключается сигнал, равный -(Uвx pп+Uвх min).
| 0 |
|
SU159568A1 | |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2461041C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА АТАКИ САМОЛЕТА | 2005 |
|
RU2281882C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2009 |
|
RU2387578C1 |
| EP 3136197 A1, 01.03.2017. | |||

