Изобретение относится к весоизмерительной технике и может быть использовано в электронных весоизмерительных устройствах и системах, применяемых для взвешивания движущихся объектов на предприятиях горной,, металлургической и дрзтнх отраслях промышленности в
Цель изобретения - повышение надежности работы весоизмерительной системы по достоверности обработки информации и работы блоков устройства за счет эталонного контроля аппаратуры.
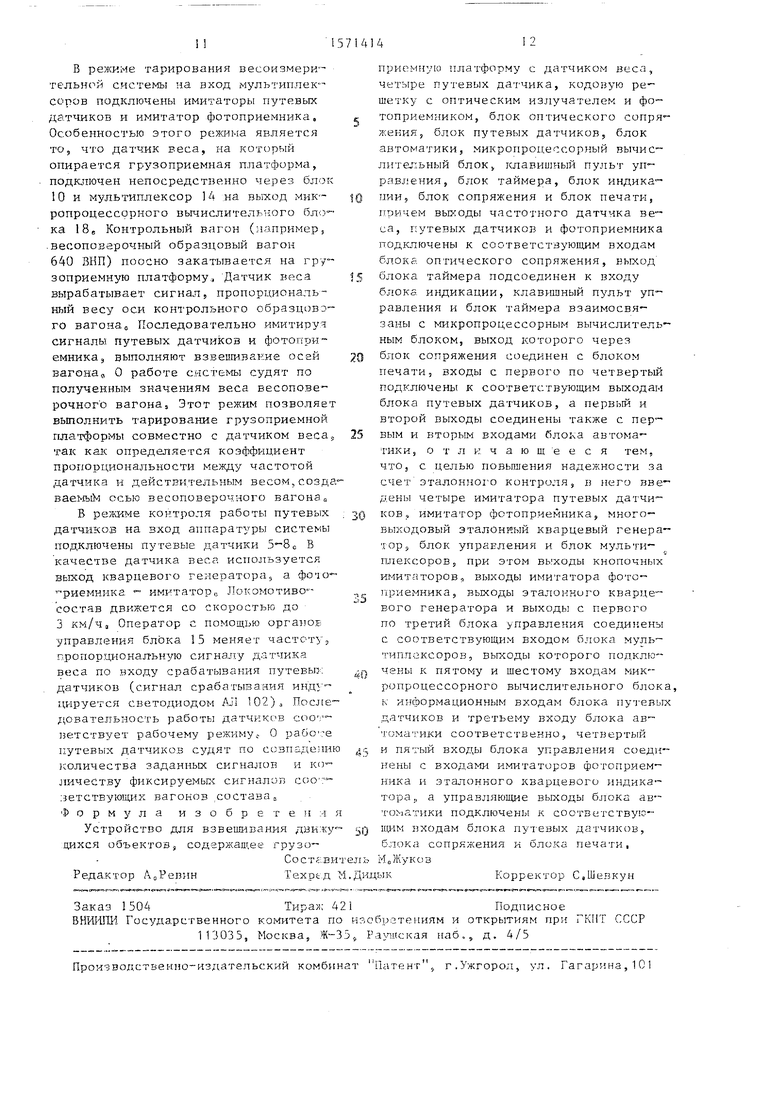
На чертеже изображена блок-схема- предлагаемого устройства контроля работы микропроцессорной весоизмерительной системы.
Устройство содержит оптический фотоприемник 1, кодовую решетку 2 s оптический излучатель 3, грузопри- емную платформу 4, путевые датчики 5-8, частотный датчик 9 веса, блок 10 оптического сопряжения, кнопочные имитаторы 1 1- сигналов путевых датчиков, имитатор 12 сигналов фотоприем- ника,-многовыходовой эталонный кларJIT
цевыи генератор J, мультиплексоры 14S блок 15 управления, блок 16 путевых датчиков, блок 17 автоматики системы, микропроцессорный вычислительный блок 18, клавишный пульт 19 управления, блок 20 таймера, блок 21 индикации текущего времени, блок 22 сопряжения с печатающим устройством и печатающее устройство 23„
Выходы оптического фотоприемнмка 1, выходы путевых датчиков 5 и 6 и выходы датчика 9 веса подключены к блоку 10 оптического сопряжения. Выходы блока 10, выходы четырех кнопочных имитаторов 1 сигналов путевых датчиков, выходы имитатора 12 сигналов фотоприемника и выходы многовыхо дового эталонного кварцевого генера5 тора 13 подключены к входам мультиплексоров 14, Три выхода блока 15 управления системой подключены на вход мультиплексоров 14, а два - на входы имитатора 2 сигналов фотопри-
Q емника и многовыходового кварцевого генератора 13 Четыре выхода мультиплексоров 14 подключены к входам блока 16 путевых датчиков, один - к входу блока 17 автоматики, два выхода 5 к входам микропроцессорного вычислительного блока 18, а два - к входу . блока 17 автоматики, один выход которого подключен к блоку 16, К входам микропроцессорного вычислитель0 ного блока 18 с помощью информационных и управляющих шин подключены клавишный пульт 19 управления и блок 20 таймера, к которому с помощью шины подключен блок 21 индикации. Микропроцессорный вычислительный блок 18 с помощью информационной шины подключен к блоку 22 сопряжения с печатающим устройством 23, выход которого информационной шиной подключен к пе- Q чатающему устройству 23, а блок 17
автоматики с помощью управляющих связей соединен с блоком 22 и печатающим устройством 23С
5
Основными сигналами блоков, используемых в устройстве, являются:
сигналы эталонных частот, пропорциональные среднему значению веса оси вагона, и частоты, равной 1 Гц, подаваемой с выхода мультиплексора 14 па вход блока 17 автоматики;
сигналы блока 16 путевых датчиков, вырабатываемые в зависимости от порядка срабатывания путевых датчиков 5-8 или сигналов четырех кнопочных имитаторов 11 путевых датчиков: Начало состава, Направление дви- дения, Начало взвешивания оси, Тип вагона,
51
Все эти сигналы подаются на вход микропроцессорного вычислительного блока 18, а сигналы Начало состава и Начало взвешивания оси подаются также на вход блока 17 автоматики.
Устройство работает следующим образом.
Блок 15 управления реализует следующие режимы работы устройства: pa- бочий режим, режим эталонного контроля обработки информации и работы аппаратуры, режим тарирования и режим проверки срабатывания путевых датчиков.
Отличительной особенностью всех режимов работы устройства является то, что в зависимости от управляющих сигналов блока 15 управления через блок мультиплексоров 14 на вход бло- ка 16 путевых датчиков и микропроцессорного вычислительного блока 18 подключаются различные блоки устройства т.е. комбинации блоков 10, 11, 12 и 13.
В рабочем режиме на вход мульти- плексоров, 14 подключен блок 10 оптического сопряжения, а с шины кварцевого генератора 13 только связь с несущей частотой, равной L Гц, что позволяет осуществить опознавание движущегося объекта, Кодовая решетка
2установлена на локомотиве. Наличие окон и перемычек в решетке позволяет перекрывать луч света от излучателя
3и затенять фотоприемник 1, Это приводит к выработке импульса, равного по длительности ширине непрозрачной перемычке кодовой решетки и скорости движения локомотива. Сочетание им- пульсов и отсутствие их позволяет сформировать двоичный код, соответствующий номеру локомотива. Наряду с опознаванием происходит взвешивание вагонов и состава в целом, распозна- ются типы вагонов в составе, определяется направление движения состава
и выводится на печать, а кроме перечисленных параметров, к время прохождения состава через весоизмери- тельный пункт.
В режиме эталонного контроля системы с помощью блока 15 управления к выходу мультиплексоров 14 подключены четыре имитатора 11 сигналов путевых датчиков, имитатор 12 сигналов фотоприемника и линии связи многовыходного кварцевого генера-
,.
JQ 15
20 25
30
,,
40 45
0
5
14
тора 13 с различными частотами, пропорциональными среднему значению веса оси вагона (по ходу алгоритма путевых датчиков и частотой, равной 1 Гц).
В режиме тарирования к выходам мультиплексоров 14 подключается выход частотного датчика веса 9 через оптический блок 10 сопряжения, через кнопки имитатора 11 путевых датчиков и имитатор 12 сигналов фотоприемника.
При выполнении режима проверки алгоритма работы путевых датчиков к выходам мультиплексоров 14 подключены путевые датчики 5-8, много- выходной кварцевый генератор 13 и имитатор 12 сигналов фотоприемника.
Рабочий режим микропроцессорной весоизмерительной системы и режим эталонного контроля обработки информации и работы аппаратуры идентичны алгоритмам работы системы в целом. Существенной особенностью является то, что в режиме контроля на вход микропроцессорного вычислительного блока 18, блока 16 путевых датчиков и блока 17 автоматики с выходов мультиплексоров 14 поступают четко заданные (соответствующие действительному алгоритму работы фотоприемника, путевых датчиков и датчика веса) последовательности сигналов срабатывания путевых датчиков (имитатор 11 путевых датчиков), последовательность сигналов от имитатора 12 сигналов фотоприемника, соответствующая известному номеру состава, и эталонные частоты с многовыходового кварцевого генератора 13, соответствующие средним расчетным эталонным значениям веса оси, вагона и состава в целом, Резьим контроля позволяет проверить по эталонным значениям номер состава, вес оси, вагона и состава, время срабатывания блока автоматики и печать результатов обработки задаваемых сигналов и работы системы. Проверяется не только правильность обработки информации, работы отдельных блоков, но и работа аппаратура: в целом.
В рабочем режиме при тяге состава, состоящего из четырехосных вагонов последовательность срабатывания путевых датчиков будет следуюцей:
где цифра указывает па номер к ми- мент срабатывания путевого датчика, подчеркнутая цифра b момент н ч вышивания оси,
В режиме эталонного кочт-лоля TJ™ но в такой же последовательное -i ie обходимо задавать с помощью кпопо :- ных имитаторов сигналы срабатьщлп4 :
пулевых датчиков а
I
Блок 15 управления позволяет Е соответствующие моменты глслючать имитатор 12 сигналов фотоприемника и подключать через мультиплексор 1 также выходы многовыходового кваще - вого генератора 13 (вместо 9 веса)s к входу микропроцессорного блока 18
При срабатывание путевого датчика 5 на вход блока 17 автоматики поступает частота, ратщая 1 Fi, от кварцевого гечагатора 13 чепез мультиплексор
СРгнал путевого датчика шреч
блок оптического сопряжения 10 ч мулэ типлексор 14 поступает на вход 5юка 16 путевых датчико.з, что приводи т- к выработке сигнала Начато состава и запуску программа работы т- цессорного вычислительного блока 18, а также включению иьчатз.ощего устройства 23 от сигнала блока 7 автоматики, так как-произошел запуск четчи- ка выдержки времени блох 17 автома--- тики, Микропроцессорный и: числительный блок 18 сразу же считм -ает т течение заданного промежучк i времс пи частоту датчика 9 веса, роч тупаютую через блок 10 оптического сопрю енлч и мультиплексор 1 на вхол бдокг 16 путевых датчиков, что прчзоцгг: i PM- работке сигнала Начало сметана и запуску программы работы .ч кропро-- цессорного вычислительного б :ок,1 18. а также включению ле атг-олего ства 23 от: сигнала блокя Л ки. так как произошел запуск гчлчи ка ль ;тержки време. и блока 1/ авгомя- тикив Микропроцессорный зы нсчительный блок 18 сразу же считывает в течение заданного промежутка времени частоту датчика 9 веса,, поступающую через блок 10 оптического сопряжение
n
5687 3678
звсшенпервый вагон;
гзвешенвторой вагон;
р. твепенп-и вагон;
взиешенпоследний вагон состава,
м мультиплексор 14, Эта частота соответствует ненагруженной платформе,
В режиме контроля все происходит идентично, но только от одного из /нопочных имитаторов 11, соответст- ьуюшего путевому датчику 5, а в ка иестве начальной нулевой частоты, соответствующей пустой платформе, бу- сет подана пропорциональная частота от генератора 13в
Запуск счетчика блока 17 автоматики позволяет осуществить организацию выдержки времени до срабатывания пу- гевог о датчика 6 или его имитатора П режиме контроляс Если сигнал от путевого датчика 6 не поступает в заданный промежуток времени (емкость счетчика при поступлении частоты, равной 1 Гц; не заполнена, т. е. нет сигнала На- тло взвешивания оси), то происходит герое блока 16 путевых датчиков по шине с блока 17 автоматики, Сброс блока 16 в исходное состояние снимает с входа микропроцессор- лого вычислительного блока 18 сигнал Из ало взг.ешизанпя u Так как с блока I7 -в юматики есть сигнал включения блока 22 сопряжения и включено ечатающее устройство 23, то происходит печать слова Авария, После печати происходит выключение блока 22 и печатающего устройства 23,
Если срабатывание путевых датчиков (нажатие имитаторов путевых дат- икоз в режиме контроля) происходит Р заданной последовательности и пу- датчик 6 сряба-ывает раньше, --ем заполнится счетчик в блоке 17 тв -оматики, то блок 16 путевых да г- выработает сигнал Начало нЗУсшивания оси. Это приведет к тому, что счетчик интервала межосного iu - -стояния в блоке 17 автоматики сбрасывается в исходное состояние, а | чкрог,роцессорннй блок 18 измеряет частота датчика 9 веса за данный интервал времени (ось на грузоприем- ной татформе) .
В режиме контроля перед на/кагием имитатора второго путевого датчика но р&нее записанной последовательное-
91
ти эталонная .частота с помощью управ ляющих сигналов блока 15 изменяется в сторону увеличения, например на два порядка. Такое увеличение обусло ленно тем, что нагрузка на ось у локомотива всегда больше, чем у вагонов, в результате чего происходит имитация взвешивания первой оси локомотива. После имитации взвешивания второй оси локомотива дается сигнал на запуск блока имитации фотоприем- ника. Если сигнал через мультиплексор 14, как и сигнал кварцевого генератора 13, поступает на вход микро процессорного вычислительного блока 18.Сигналы от имитатора фотоприемни- ка считываются микропроцессорным вычислительным блоком и известный эталонный номер локомотива записывается в ячейку памяти. Каждый сигнал имитатора путевого датчика 6 вырабатывает в блоке 16 путевых датчиков сигнал Начало взвешивания оси, который запускает микропроцессорный вычислительный блок на считывание частоты, имитирующей нагрузку на датчик веса, и сбрасывает счетчик меж- осной выдержки времени в блоке автоматики в исходное состояние. После взвешивания шести осей локомотива с помощью органов управления блока 15 меняют подаваемую частоту от кварцевого генератора 13, в дальнейшем имитирующую нагрузку от осей первого вагона. Последовательно нажимая кнопки имитаторов 11 путевых датчиков взвешивают оси. Так как весоизмерительная система расчитана на динамическое взвешивание, то интервал взвешивания оси разбивается на п интервалов, т.е. Т0 &tn, где Дг - интервал измерения, В целом в системе реализован нерекурсивный цифровой фильтр, для которого справедливо со- отношение
Ро в
Т
СГАТ,
РО - масса взвешенной оси;
G- - значение массы оси измеренное за время u t на 1-ом участке с вычетом значения веса пустой платформы (нулевая частота);
А -г - значение коэффициента весовой функции, используемой для подавления динамических
jg j 20 25 30 ,- 40 45
50
5
14Ю
составляющих в сигнале датчика веса.
После взвешивания (имитации) первого вагона снова меняют значение эталонной частоты датчика веса и последовательно имитируют взвешивание нескольких вагонов, меняя частоту. Выполнив имитацию взвешивания нескольких вагонов, прекращают нажатие имитаторов путевых датчиков. Частотой, равной 1 Гц, происходит заполнение счетчика выдержки времени в блоке 17 автоматики. Сигнал с выхода блока 17 производит сброс в блоке 16 путевых датчиков управляющего сигнала Начало состава, а второй сигнал блока 17 открывает схемы блока 22 сопряжения для выдачи информации с микропроцессорного вычислительного блока 18, в результате чего оно переходит от приема информации к ее обработке, В соответствии с ранее записанной программой происходит обработка накопленных значений сигнала имитатора датчика веса. По окончании арифметической обработки микропроцессорный вычислительный блок анализирует сигналы Тип вагона и Направление движения, подаваемые с выхода блока путевых датчиков. Если они равны единице, то первые шесть измерений отбрасываются, так как они соответствуют локомотиву, а затем формируется вес вагона последовательным суммированием по четыре оси. После формирования веса вагонов формируется вес состава и микропроцессорный вычислительный блок 18 считывает с выхода блока таймера текущее значение времени суток. По окончании обработки информации выполняется ее печать в следующей последовательности: время, номер состава, вес каждого вагона, вес состава, направление движения. Выполнив печать, система выключается. Так как на вход весоизмерительной системы в качестве сигнала датчика веса подавалась эталонная частота, пропорциональная среднему значению оси вагона, а от фотоприемника - сигналы, имитирующие номер состава, сигналы срабатывания путевых датчиков, то расчетные эталонные значения печати известны. Полученные величины свидетельствуют о работоспособности всей системы при их соответствии значениям эталона.
10
20
25
приемную платформу с датчиком веса, четыре путевых датчика, кодовую ре- шетку с оптическим излучателем и фо топркемником, блок оптического сопряжения, блок путевых датчиков, блок автоматики, микропроцессорный вычислительный блок, клавишный пульт управления, блок таймера, блок индикации, блок сопряжения и блок печати, выходы частотного датчика веса, путевых датчиков и фотоприемника подключены к соответствующим входам блок оптического сопряжения, выход блока таймера подсоединен к входу блока индикации, клавишный пульт управления и блок таймера взаимосвязаны с микропроцессорным вычислительным блоком, выход которого через блок сопряжения соединен с блоком печати, входы с первого по четвертый подключены к соответствующим выходам блока путевых датчиков, а первый и второй вьгходы соединены также с первым и вторым входами блока автоматики, отличающееся тем, что, с целью повышения надежности за счет эталонного контроля, в него введены четыре имитатора путевых датчиков, имитатор фотоприемника, много- выходовый эталонный кварцевый генератор,, блок управления и блок мультиплексоров, при этом выходы кнопочных имитаторов, выходы имитатора фото- приемника, выходы эталонного кварцевого генератора и выходы с первого по третий блока управления соединены с соответствующим входом блока муль- ипл ксоров, вьгходы которого подключены к пятому и шестому входам микропроцессорного вычислительного блока, ь информационным входам блока путевых датчиков и третьему входу блока ав- соответственно, четвертый и пя -ый входы блока управления соединены с входами имитаторов фо гоприем- нчка и эталонного кварцевого индикатора., а управляющие выходы блока автоматики подключены к соответствующим входам блока путевых датчиков, блока сопряжения и блока печати, М0 Жуков
Корректор С.Шевкун
Заказ 1504Тираж 421Подписное
ВНИИПИ Государственного комитета по чтобизтгииям и открытиям при ГКПТ СССР 113035, Москва, Ж-З,, Раушская наб,, д. 4/5
В режиме тарирования весоизмерительной системы на вход мультиплек сиров подключены имитаторы путевых датчиков и имитатор фотоприемника, Особенностью этого режима является то, что датчик веса, на который опирается грузоприемная платформа, подключен непосредственно через блок 10 и мультиплексор 14 на выход микропроцессорного вычислителг-чого блока 18е Контрольный вагон (чяпример, весоповерочный образцовый вагон 640 ВНП) поосно закатывается на гр/- зоприемную платформу, Датчик веса вырабатывает сигнал, пропорциональный весу оси контрольного сбразцовэ- го вагонав Последовательно имитируч сигналы путевых датчиков и фотолри- емника, выполняют взвешиварие осей вагонао 0 работе системы судят по полученным значениям веса весопове- рочного вагонаs Этот режим позволяет выполнить тарирование грузоприемной платформы совместно с датчиком веса, так как определяется коэффициент пропорциональности между частотой датчика и действительным весом,создаваемым- осью весоповеро ного вагона„ В режиме контроля работы путевых датчиков на вход аппаратуры системы подключены путевые датчики 5-8С В качестве датчика веса используется выход кварцевого гелеиатора, а фочо- риемнпкг - имитатор,, Локэмотиво-- состав движется со скоростью до 3 км/ч Оператор с помощью органов управления блока 15 меняет чаете т}, гропорционал-ьную сигналу длтчика веса по входу срабатывания путевьп датчиков (сигнал срабатьоалия индз- дируечся светодиодом АЛ 102), Последовательность работы датчиков летствует рабочему режиму,- 0 работе путевых датчиков судят по ссзпздечню количества заданных сигналов и количеству фиксируемьп-с сигналов соо - зетствующих вагонов состава. Формула изобретен -т я Устройство для взвешивания диь. ку дихся объектов, содгржащее грузо-
Сост вител Редактор Л„Ревин
30
:-5
А О
jO
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1989 |
|
SU1691689A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Устройство для взвешивания железнодорожного подвижного состава во время движения | 1982 |
|
SU1046621A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Устройство для взвешивания железнодорожных вагонов | 1980 |
|
SU938028A1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571408A1 |
Изобретение относится к весоизмерительной технике и предназначено для использования в электронных весоизмерительных устройствах и системах, использующихся для взвешивания движущихся объектов на предприятиях горнорудной, металлургической и других отраслях промышленности. С целью повышения надежности работы за счет эталонного контроля введены режимы контроля, тарирования и выполнения алгоритма работы путевых датчиков при эталонных измерительных сигналах, которые осуществляются в следующей последовательности. Режим контроля осуществляется с помощью блока 15 управления, который задает управляющие сигналы, обеспечивающие подключение на вход блока 18 кнопочных имитаторов 11, генератора 13. Алгоритм работы задается с помощью последовательной подачи сигналов имитаторов 11 путевых датчиков, фотоприемника 1 и в заданные моменты времени эталонной частоты, соответствующей по величине заданному диапазону измерений. О правильности работы устройства судят по контрольной эталонной печати результатов обработки сигналов. Грузоприемная платформа 4 с датчиком 9 веса нагружается образцовыми грузами в определенной последовательности работы устройства. О правильности взвешивания судят по контрольной печати и сравнении со значением действительной массы. 1 ил.
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4509608, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
