Изобретение относится к весоизмерительной технике и предназначено для использования в электронных весоизмерительных устройствах, применяемых для взвешивания движущихся объектов.
Целью изобретения является повышение достоверности контроля.
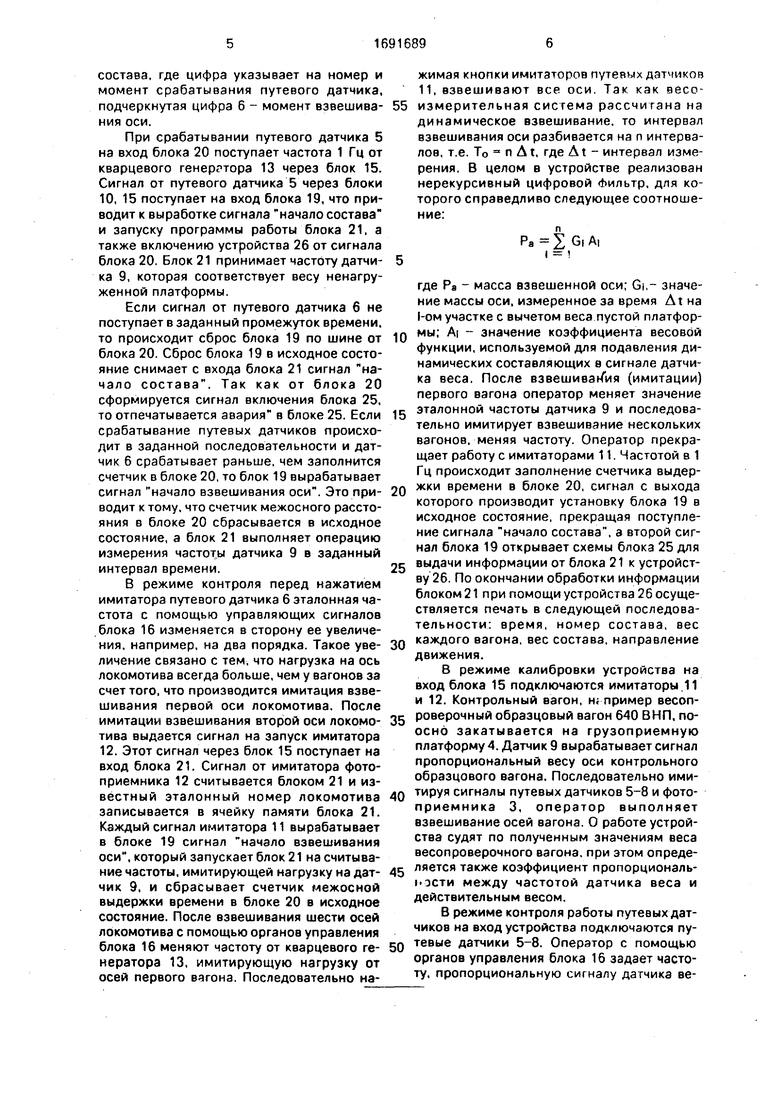
На чертеже представлена структурная схема устройства.
Устройство содержит оптический излучатель 1, кодовую решетку 2, фотоприемник 3, грузоприемную платформу 4, путевые датчики 5-8. датчик 9 веса, блок 10 оптического сопряжения, имитаторы 11 сигналов путевых датчиков, имитатор 12 фотоприемника, кварцевый генератор 13, блок 14 автоматического распределения эталонных сигналов, блок 15 мультиплексоров, блок 16 управления, два элемента И 17,четыре элемента ИЛИ 18, блок 19 путевых датчиков, блок 20 автоматики, микропроцессорный вычислительный блок 21, клавишный пульт 22 управления, таймер 23, блок 24 индикации текущего времени, блок 25 сопряжения с печатающим устройством и печатающее устройство 26.
Оптический излучатель 1 установлен на мачте на уровне кодовой решетки 2, расположенной сверху локомотива. Выходы фото- приемника 3, путевых датчиков 5-8 и
О
ю сь
00
ю
датчика 9, на который опирается грузопри- емная платформа 4, подключены к блоку 10 оптического сопряжения. Выходы блока 10, четырех имитаторов 11, имитатора 12, кварцевого генератора 13 и блока 14 подключены к соответствующим входам блока 15. Первый, второй и третий выходы блока 16 соединены с соответствующими управляющими входами блока 15, четвертый, пятый выходы - с соответствующими входами имитатора 12, а шестой выход соединен с входом кварцевого генератора 13. Два выхода кварцевого генератора 13 соответственно подключены к входам блока 14, а третий выход генератора 13 и два выхода блока 14 подключены к соответствующим входам блока 15, первый и второй выходы которого подсоединены соответственно к первому, второму входам блока 21, с которым соединены клавишный пульт 22 управления и таймер 23. Третий-шестой входы блока 21 соответственно соединены с выходами блока 19, третий, четвертый выходы которого соединены с первым, вторым входами блока 20, третий вход которого соединен с третьим выходом блока 15. Управляющие входы блока 20 подсоединены к соответствующим входам блоков 19, 25, и устройству 26. Входы последнего через блок 25 соединены с выходной шиной блока 21, первый и второй выходы которого подсоединены к первым входам соответственно первого, четвертого элементов ИЛИ и соответственно седьмому,- восьмому выходам блока управления. Третий и четвертый выходы блока 21 соответственно подсоединены к первым входам первого, второго элементов И, вторые входы которых подсоединены к третьему выходу блока 21, четвертый-седьмой выходы которого соответственно подсоединены к вторым входам четырех элементов ИЛИ 18 Первые входы второго и третьего элементов ИЛИ 18 подсоединены соответственно к выходам первого, второго элементов И 17, Выходы четырех элементов ИЛИ 18 соединены с соответствующими входами блока 19.
Основными сигналами блоков являются сигналы эталонных частот, пропорциональные среднему значению веса оси вагона и частоты равной, например, 1 Гц, подаваемой с выхода блока 15 на вход блока 20; сигналы блока 19, вырабатываемые в зависимости от порядка срабатывания путевых датчиков 5-8 или сигналы четырех кнопок- имитаторов путевых датчиков блока 11 начало состава, направление движения,
начало взвешивания оси, тип вагона ; сигналы блока 14, пропорциональные среднему значению веса оси вагона и сигналу срабатывания путевого датчика 6 или 7 в зависимости от управляющего кода от блока21.
Устройство работает следующим образом.
Блоки 16 и 21 позволяют реализовать следующие режимы работы: рабочий режим, режим эталонного контроля обработки информации и работы устройства, режим калибровки, режим проверки срабатывания путевых датчиков, режим тестового автоматического контроля.
В рабочем режиме на вход блока 15 подсоединен блок 10. Кодовая решетка 2 устанавливается на локомотиве. Наличие окон и перемычек в решетке 2 позволяет перекрывать луч света от излучателя 1 и
затенять фотоприемник 3. В результате распознаются типы вагонов в составе, определяется направление движения состава и выводится на печать время прохождения состава через весоизмерительный пункт.
В режиме эталонного контроля подключается четыре имитатора 11, имитатор 12 и линии связи кварцевого генератора 13 с различными частотами.
В режиме калибровки к выходам блока
15 подключаются выход датчика 9, имитаторы 11 и 12.
В режиме проверки срабатывания путевых датчиков 5-8 к входам блока 15 подключаются путевые датчики 5-8, кварцевый
0 генератор 13 и имитатор 12.
В режиме тестового автоматического контроля по сигналам блока 21 через элементы ИЛИ 18 на вход блока 19 подается сигнал начало работы устройства, а через
5 элемент И 17, элемент ИЛИ 18 подаются сигналы с частотой, например, 1 Гц. Блок 21 через блок 15 к своим входам подключает имитатор 12 и блок 14.
В рабочем режиме при тяге состава, со0 стоящего из четырехосных вагонов, последовательность срабатывания путевых датчиков следующая:


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571414A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Весы | 1989 |
|
SU1783314A1 |
| Устройство для взвешивания железнодорожного подвижного состава во время движения | 1982 |
|
SU1046621A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1983 |
|
SU1078256A1 |

Изобретение относится к весоизмерительной технике и предназначено для использования в Электронных весоизмерительных устройствах и системах, применяемых для взвешивания движущихся объектов. Целью изобретения является повышение достоверности контроля. Устройство состоит из оптического излучателя 1, кодовой решетки 2, оптического фотоприемника 3, грузоприемной платформы А, путе вых датчиков 5-8, частотного датчика 9 веса, блока 10 оптического сопряжения, кнопочных имитаторов 11 путевых датчиков, ими татора 12 фотоприемника, эталонного кварцевого генератора 13, блока 14 автоматического распределения эталонных сигналов, блока 15 мультиплексоров, блока 16 управления, двух логических элементов И 17, четырех логических элементов ИЛИ 18, блока 19 путевых датчиков, блока 20 автома тики, микропроцессорного вычислительного блока 21, клавишного пульта 22 управления, таймера 23, блока 24 индикации текущего времени, блока 25 сопряжения и печатающего устройства 26 Автоматический тестово-эталонный контроль системы выполняется каждый раз после выполнения рабочего цикла с учетом направления движения локомотивосостава 1 ил.
7657 5785 8758
8758
6578 5865 5865
8687
56875678
-взвешен первый вагон -взвешен второй вагон -взвешен n-й вагон
-взвешен последний вагон
состава, где цифра указывает на номер и момент срабатывания путевого датчика, подчеркнутая цифра 6 - момент взвешивания оси.
При срабатывании путевого датчика 5 на вход блока 20 поступает частота 1 Гц от кварцевого генератора 13 через блок 15. Сигнал от путевого датчика 5 через блоки 10, 15 поступает на вход блока 19, что приводит к выработке сигнала начало состава и запуску программы работы блока 21, а также включению устройства 26 от сигнала блока 20. Блок 21 принимает частоту датчика 9, которая соответствует весу ненагруженной платформы.
Если сигнал от путевого датчика б не поступает в заданный промежуток времени, то происходит сброс блока 19 по шине от блока 20. Сброс блока 19 в исходное состояние снимает с входа блока 21 сигнал начало состава. Так как от блока 20 сформируется сигнал включения блока 25, то отпечатывается авария в блоке 25. Если срабатывание путевых датчиков происходит в заданной последовательности и датчик 6 срабатывает раньше, чем заполнится счетчик в блоке 20, то блок 19 вырабатывает сигнал начало взвешивания оси. Это приводит к тому, что счетчик межосного расстояния в блоке 20 сбрасывается в исходное состояние, а блок 21 выполняет операцию измерения частоты датчика 9 в заданный интервал времени.
В режиме контроля перед нажатием имитатора путевого датчика 6 эталонная частота с помощью управляющих сигналов блока 16 изменяется в сторону ее увеличения, например, на два порядка. Такое увеличение связано с тем, что нагрузка на ось локомотива всегда больше, чем у вагонов за счет того, что производится имитация взвешивания первой оси локомотива. После имитации взвешивания второй оси локомотива выдается сигнал на запуск имитатора 12. Этот сигнал через блок 15 поступает на вход блока 21. Сигнал от имитатора фотоприемника 12 считывается блоком 21 и известный эталонный номер локомотива записывается в ячейку памяти блока 21. Каждый сигнал имитатора 11 вырабатывает в блоке 19 сигнал начало взвешивания оси, который запускает блок 21 на считывание частоты, имитирующей нагрузку на датчик 9. и сбрасывает счетчик межосной выдержки времени в блоке 20 в исходное состояние. После взвешивания шести осей локомотива с помощью органов управления блока 16 меняют частоту от кварцевого генератора 13, имитирующую нагрузку от осей первого вагона. Последовательно нажимая кнопки имитаторов путевых датчиков 11, взвешивают все оси. Так как весо- 5 измерительная система рассчитана на динамическое взвешивание, то интервал взвешивания оси разбивается на п интервалов, т.е. Т0 n At, где At - интервал измерения. В целом в устройстве реализован нерекурсивный цифровой Фильтр, для которого справедливо следующее соотношение:
Ра i Gi A, 5
где Р8 - масса взвешенной оси; GI,- значение массы оси, измеренное за время At на 1-ом участке с вычетом веса пустой платфорQ мы; AI - значение коэффициента весовой функции, используемой для подавления динамических составляющих в сигнале датчика веса. После взвешиван ия (имитации) первого вагона оператор меняет значение
c эталонной частоты датчика 9 и последовательно имитирует взвешивание нескольких вагонов, меняя частоту. Оператор прекращает работу с имитаторами 11. Частотой в 1 Гц происходит заполнение счетчика выдерQ жки времени в блоке 20, сигнал с выхода которого производит установку блока 19 в исходное состояние, прекращая поступление сигнала начало состава, а второй сигнал блока 19 открывает схемы блока 25 для
5 выдачи информации от блока 21 к устройству 26. По окончании обработки информации блоком 21 при помощи устройства 26 осуществляется печать в следующей последовательности: время, номер состава, вес
0 каждого вагона, вес состава, направление движения.
В режиме калибровки устройства на вход блока 15 подключаются имитаторы 11 и 12. Контрольный вагон, н; пример весоп5 роверочный образцовый вагон 640 ВНП, по- осно закатывается на грузоприемную платформу 4. Датчик 9 вырабатывает сигнал пропорциональный весу оси контрольного образцового вагона. Последовательно имиQ тируя сигналы путевых датчиков 5-8 и фотоприемника 3, оператор выполняет взвешивание осей вагона. О работе устройства судят по полученным значениям веса весопроверочного вагона, при этом опредес ляется также коэффициент пропорциональности между частотой датчика веса и действительным весом.
В режиме контроля работы путевых датчиков на вход устройства подключаются пу0 тевые датчики 5-8. Оператор с помощью органов управления блока 16 задает частоту, пропорциональную сигналу датчика веса, по ходу срабатывания путевых датчиков 5-8. Сигнал срабатывания индицируется светодиодом. О работе путевых датчиков судят по совпадению количества отмеченных сигналов количеству сигналов, соответствующих осям вагонов в составе.
В режиме тестового автоматического контроля работы устройства по сигналам от блока 21 проверяется работа имитатора 12, блоков 20, 25, устройства 26 и обеспечивается программная последовательность выполнения алгоритма, соответствующего направлению движения состава локомотива. После прохождения состава в прямом направлении, т.е., когда локомотив находится в голове поезда, при движении отдатчика 5 к датчику 6 выполняется печать всех измеренных параметров. После печати всех измеренных параметров при движении в прямом направлении устройство выключается. С выдержкой, равной 10 с, блок 21 выдает сигнал на первый вход первого элемента ИЛИ 18. Это приводит к включению блока 19, который вырабатывает сигнал начало состава, при этом начинает работать программа по ожиданию сигнала начало взвешивания оси и сигнала от фотоприемника 3 или его имитатора. Управляющий сигнал от блока 21 поступает также на первый вход блока 16, а на второй вход этого блока с блока 21 подается код 10. Это приводит к тому, что блок 16 управляющими сигналами подключает через блок 15 на вход блока 21 имитатор 12 и блок 14. В тот же момент времени по трем другим выходам блок 16 включает имитатор 12 для выдачи последовательности сигналов соответствующей кодовой решетке 2, а также переключает выходы кварцевого генератора 13 на вход блока 14. Включение в работу блока 14 происходит с задержкой в 3 с, а за это время блок 21 производит опознание кодовой решетки 2 и выдав управляющий сигнал на первый вход первого элемента И 17, сигналы с выхода которого поступают на вход блока 19 и соответствуют сигналам начало взвешивания оси. По истечении 3 с сигнал с выхода блока 14 через блок 15, через элемент И 17 поступает на вход блока 19. который включает блок 21 на измерение нулевой эталонной частоты, соответствующей весу ненагруженной платформы. Секундный сигнал от кварцевого генератора 13 в блоке 14 последовательно подключает к входу блока 15 шесть раз нулевую частоту (локомотив), восемь раз первую эталонную частоту (два четырехосных вагона), восемь раз вторую эталонную частоту (два вагона) и восемь раз третью эталонную частоту (два вагона), т е. будут взвешены шесть вагонов Секундные
сигналы поступают на вход блока 20 Блок 21 по секундным сигналам, соответствующим сигналу начало взвешивания оси, измеряет поступающие частоты. Выполнив
заданную последовательность сигналов и частот, блок 14 блокируется, а блок 20 через определенный период времени включает блок 25 и устройство 26. Блок 21 выдает на печать контрольный номер состава, взвешенные веса шести вагонов, суммарное значение веса, направление движения и время контрольной тестовой проверки
Если состав двигается в обратном направлении, то микропроцессорный вычис5 лительный блок 21 выдает код 01 Это приводит к тому, что в работу вступают третий и четвертый элементы ИЛИ 18, второй элемент И 17. Блок 14 выдает один раз нулевую частоту (платформа не нагружена),
0 последовательно восемь раз первую эталонную частоту, восемь раз вторую, третью и еще шесть раз третью (локомотив). Затем выполняется контрольная печать. Формула изобретения
5Устройство для взвешивания движущихся объектов, содержащее грузоприем- ную платформу с датчиком веса, четыре путевых датчика, кодовую решетку с оптическим излучателем и фотоприемником, тай0 мер, выход которого подсоединен к входу блока индикации текущего времени, блок оптического сопряжения, входы которого соответственно подсоединены к выходам датчика веса, путевых датчиков и фотопри5 емника, выходы блока оптического сопряжения, четырех имитаторов путевых датчиков, имитатора фотоприемника, кварцевого генератора, первый, второй и третий выходы блока управления соединены с со0 ответствующими управляющими входами мультиплексоров, первый и второй выходы которого подсоединены к первому, второму входам микропроцессорного вычислительного блока, с которым соединены клавиш5 ный пульт управления и таймер, третий, четвертый, пятый и шестой входы микропроцессорного вычислительного блока соответственно соединены с выходами блока путевых датчиков, третий, четвертый выхо0 ды которого соединены с первым, вторым входами блока автоматики, третий вход которого соединен с третим выходом блока мультиплексоров, управляющие входы блока автоматики подсоединены к соответсгву5 ющим входам блока путевых датчиков, блока сопряжения, блока печати, входы последнего через блоксопряжения соединены с выходной шиной микропроцессорного вычислительного блока, четвертый и пятый выходы блока управления соединены с
соответствующими входами имитатора фотоприемника, шестой выход соединен с входом кварцевого генератора, отличающееся тем, что, с целью повышения достоверности контроля, в него введены блок автоматического распределения эталонных сигналов, два элемента И, четыре элемента ИЛИ, при этом первый и второй выходы микропроцессорного вычислительного блока подсоединены к первым входам соответственно первого, четвертого элементов ИЛИ и соответственно седьмому, восьмому выходам блока управления, третий, четвертый выходы микропроцессорного вычислительного блока подсоединены соответственно к первым входам первого, второго элементов И, вторые входы которых
подсоединены к третьему выходу блока мультиплексоров, четвертый, пятый, шестой и седьмой выходы которого соответственно подсоединены к вторым входам четырех
элементов ИЛИ, первые входы второго и третьего элементов ИЛИ подсоединены соответственно к выходам первого, второго элементов И. выходы четырех элементов ИЛИ соединены с соответствующими входами блока путевых датчиков, входы имитатора фотоприемника соединены с соответствующими входами кварцевого генератора, два выхода которого соответственно соединены с двумя входами блока автоматического распределения эталонных сигналов, два выхода которого соединены с соответствующими входами блока мультиплексоров.
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571414A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
