777УЛ2.
W
nX H «Jt-JUj
/ /
15 П
фие.1
fftftT
7/
1
Изобретение относится к области нанесения покрытий химическим и электролитическим способом и может быть использовано в приборостроительной и (машиностроительной промышленности.
Целью изобретения является повышение производительности, увеличение надежности и срока службы.
На фиг. 1 изображена общая схема автооператора с приводом; на фиг. 2- схема привода автооператора.
Автооператор состоит из рамы 1 с кадками, по которой закреплена колон- Hci 2, в направляющих последней уста- нфвлена каретка 3. В верхней части колонны 2 имеется звездочка k, а в нижней части имеется блок 5 звездо- чфк. К каретке 3 закреплена цепь 6, перекинутая через звездочку блока 5.
В нижней части рамы 1 имеются звездочки 7. Автооператор перемещается по направляющим 8. Внутри направляющий с одной стороны установлены звездочки 9 и 10, а с другой стороны на- правляющих установлен привод 11 автооператора , снабженный двумя выходными звездочками 12 и 13. Через звездочки 9 и 13 проходит цепь 14, причем в автооператоре цепь через звез- Дочки 7 перекинута через звездочку блока 5. Через звездочки 10 и 13 Проходит цепь 15, причем концы цепи жестко соединены с рамой 1 автооператора. Направляющие 8 автооператора установлены вдоль ванн 1б„
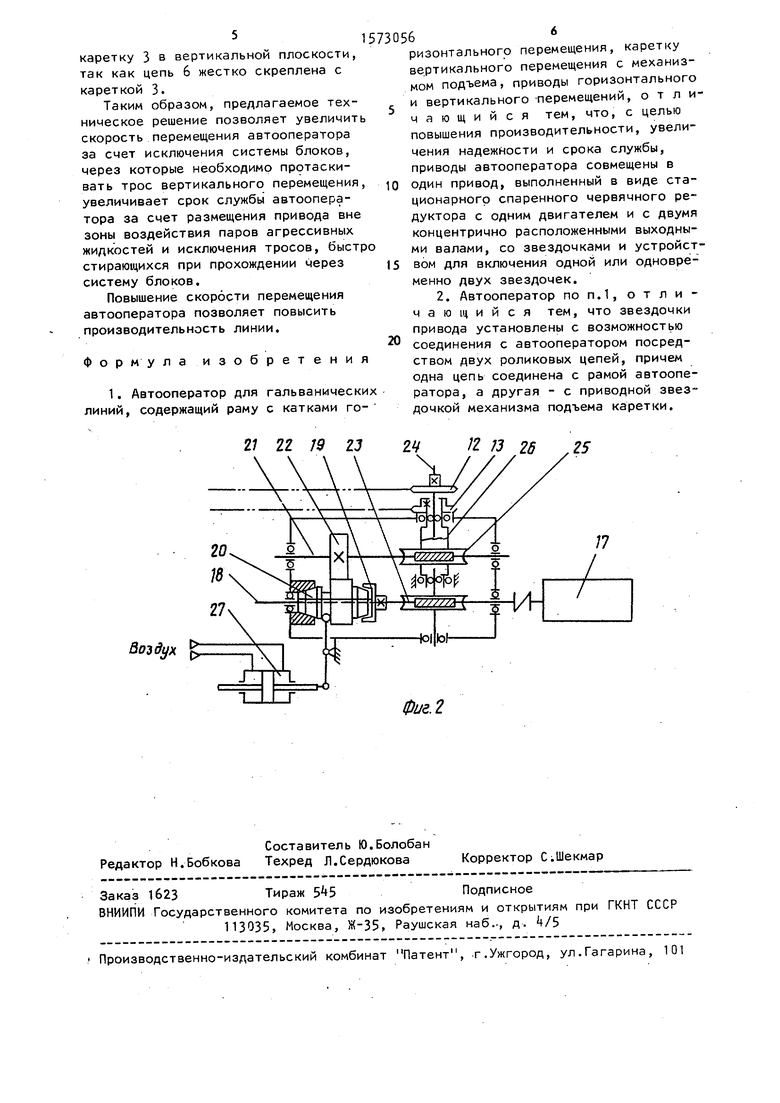
Привод 11 автооператора состоит из электродвигателя 17, соединенного с валом 18, на котором смонтированы червяк, коническая полумуфта 19 и скользящая шестерня 20 с конусами. Параллельно валу 18 установлен вал 21, на котором имеется червяк и зубчатое колесо 22, зацепляемое с шестерней 20. Червяки входят в зацепление с червячными колесами, причем червячное колесо 23 закреплено на валу 2k, а колесо 25 на ступице 26 причем вал 2k проходит через ступицу 26. На ступице 26 и на валу 2k за- креплены соответственно звездочки 13 и 12, Корпус привода снабжен пневматическим устройством 27 для включения в работу червячной пары с звездочкой 13, закрепленной на ступице.
Автооператор работает следующим образом.
0 5
0
5
Горизонтальное перемещение автооператора по направляющим 8 осуществляется при одновременном синхронном вращении звездочки 13 и 12 привода
11.Для этого скользящая шестерня 20 своим конусом сцепляется с конусом полумуфты 19, жестко закрепленной на валу 18. При этом вращение от двигателя 17 через червячную пару, состоящую из червяка и червячного колеса 23, передается на вал 24, на конце которого жестко закреплена звездочка
12.Одновременно вращение через полумуфту 19, цилиндрическую пару, состоящую из скользящей шестерни 20 и зубчатого колеса 22,передается на вал 21 и далее через червячную пару,( состоящую из червяка и червячного колеса 25, на ступицу 26, на конце которой жестко закреплена звездочка
13.Таким образом, звездочки 13 и 12 вращаются синхронно, и при их вращении цепь k вертикального перемещения каретки 3 и цепь 15 горизонтального перемещения автооператора перемещаются с одной скоростью, и автооператор перемещается по направляющим 8. Цепь 15 перемещается с одной скоростью с автооператором, поэтому не происходит смещения цепи относительно блока 5 звездочек, и звездочка не вращается, каретка 3 стоит на месте.
Вертикальное перемещение каретки осуществляется при одЛой работающей звездочке, а вторая звездочка , связана с цепью горизонтального перемещения рамы, должна быть зафиксирована. Для этого скользящая шестерня 20 с помощью пневматического устройства 27 смещается влево и своим конусом фиксируется в конусе корпуса, червячное колесо 25 и звездочка 13 не вращаются. Цепь 15 горизонтального перемещения неподвижна, рама 1 автооператора стоит на месте.
Вращение от двигателя 17 привода 11 передается через червячную пару на вал 2k, проходящий через ступицу 26. Звездочка 12 на валу 2k вращается, перемещая цепь k вертикального . перемещения. При перемещении цепи k блок 5 звездочки начинает вращать- ся, при этом цепь 6, перекинутая через блок 5 и звездочку k, получает поступательное движение, перемещая
21 21 19 23
Фиг. 2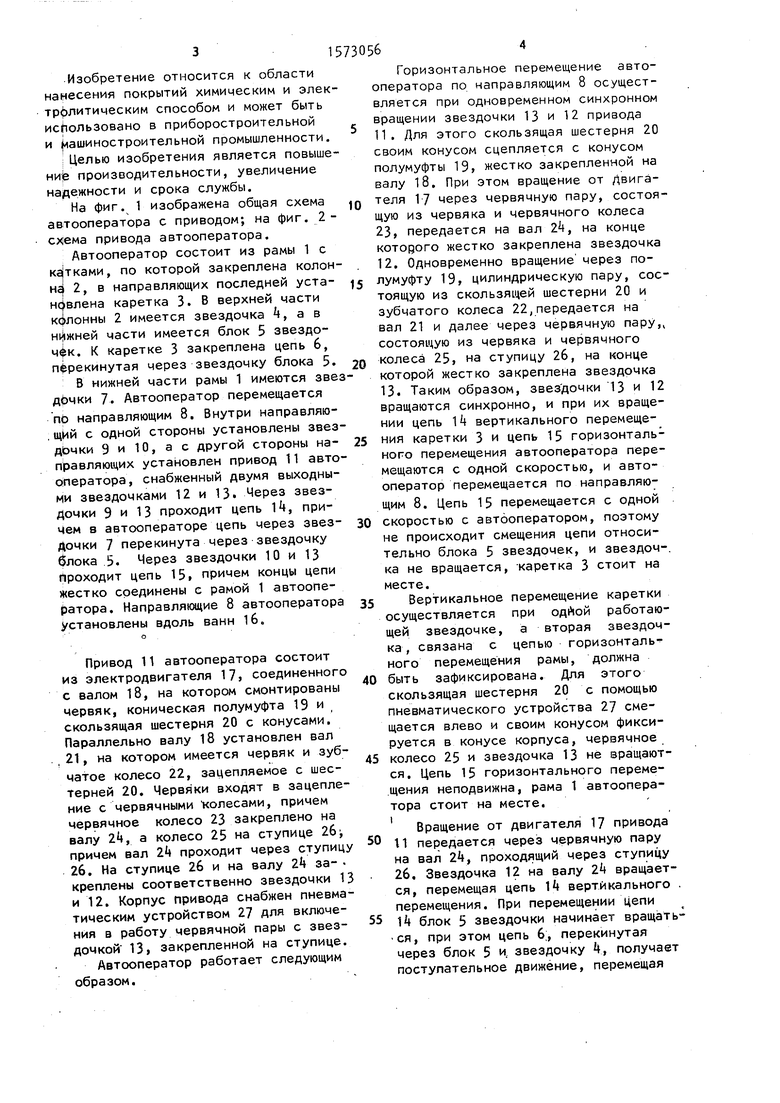
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обрезывания концов настила тканей и т.п. | 1933 |
|
SU38106A1 |
| Канатный привод цепной пилы | 1985 |
|
SU1283391A1 |
| Устройство для настилания текстильных полотен на закройный стол | 1979 |
|
SU903268A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1980 |
|
SU893349A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ КОНЦОВ НАС ТИЛА | 1933 |
|
SU39057A1 |
| Прокатная клеть | 1986 |
|
SU1342545A1 |
| Устройство для изготовления стеганных деталей мебельной облицовки | 1986 |
|
SU1359369A1 |
| Зубчатый вариатор скорости | 1978 |
|
SU750187A1 |
| МЕХАНИЗМ ДЛЯ УПЛОТНЕНИЯ НАМОТКИ НА ТКАЦКОМ НАВОЕ ШЛИХТОВАЛЬНОЙ МАШИНЫ | 2001 |
|
RU2188882C1 |
| Приводной рольганг для ориентированной подачи изделий | 1980 |
|
SU933561A1 |
Изобретение относится к нанесению покрытий химическим и электрохимическим способом и может быть использовано в приборостроительной и машиностроительной промышленности. Целью изобретения является повышение производительности, увеличение надежности и срока службы. При горизонтальном перемещении автооператора осуществляется одновременное синхронное вращение звездочек 12 и 13 привода 11. В результате чего цепь 14 вертикального перемещения и цепь 15 горизонтального перемещения автооператора перемещаются с одной скоростью и поэтому не происходит смещение цепи относительно блока звездочек 5, что не вызывает ее вращения, и каретка 3 находится на месте. При вертикальном перемещении каретки 3 осуществляется вращение только одной звездочки 12. Таким образом предложенное техническое решение позволит увеличить скорость перемещения автооператора за счет исключения системы блоков, через которые необходимо протаскивать трос вертикального перемещения каретки. 1 з.п. ф-лы, 2 ил.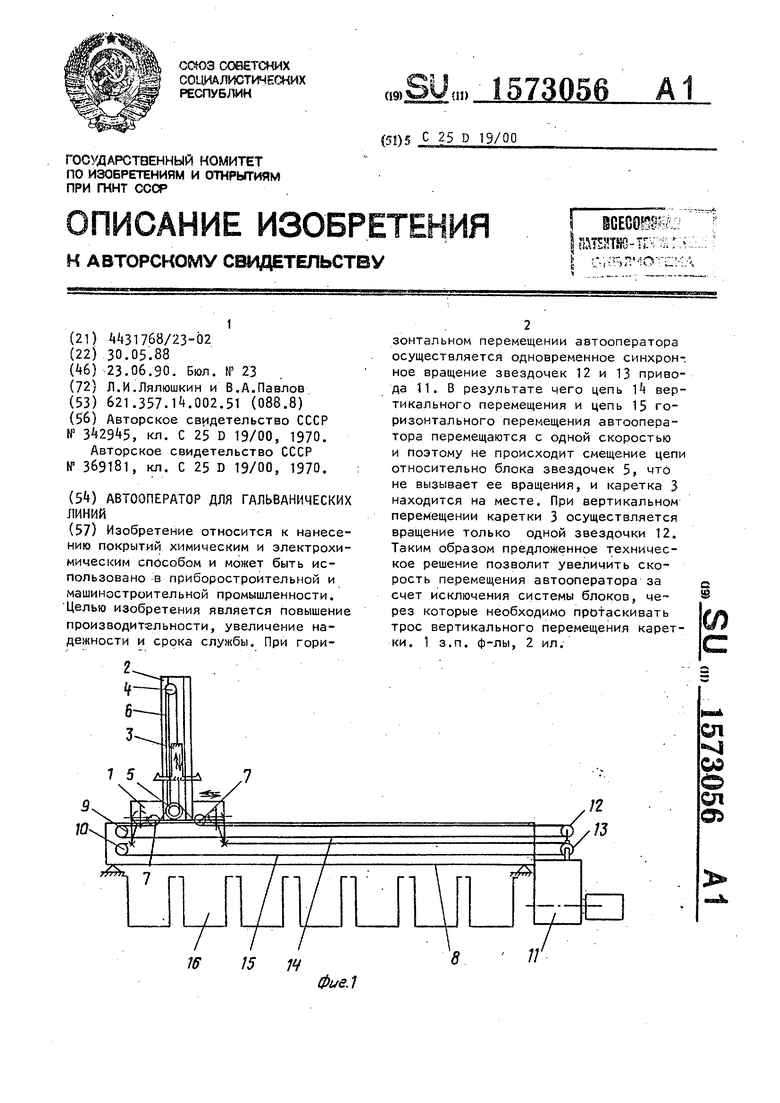
| Авторское свидетельство СССР № , кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИИ?<Г->&' •••^,'"'-;:,-.-,.„, ^rj-- • --^ *-*.• i/S Г5 | 0 |
|
SU369181A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ( АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ | |||
