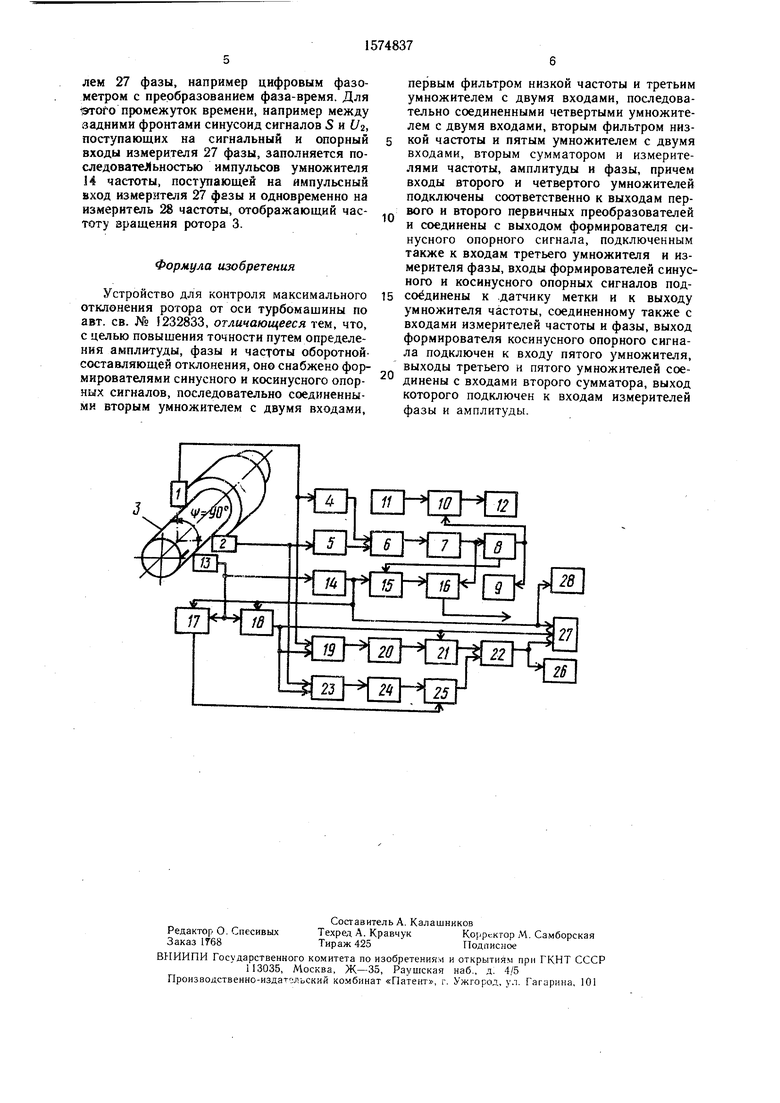
iCBOHM входом с выходом блока 7 извлече- |ния корня, датчик 13 метки установлен вбли- зи ротора 3 и его выход дополнительно соединен с формирователями 17 и 18 косинусного и синусного опорных сигналов, а другие входы этих формирователей соединены с выходом умножителя 14 частоты. Выход первого первичного преобразователя 1 через последовательно соединенные второй умножитель 19, первый фильтр 20 низкой частоты и третий умножитель 21 соединен с одним из входов второго сумматора 22, выход второго первичного преобразователя 2 через последовательно соединенные четвертый умножитель 23, второй фильтр 24 низкой частоты и пятый умножитель 23, второй фильтр 24 низкой частоты и пятый умножитель 25 соединен с другим входом второго сумматора 22, выход которого подключен к измерителю 26 амплитуды и сигнальному входу измерителя 27 фазы. Выход формирователя 18 синусного опорного сигнала соединен с другими входами второго, третьего и четвертого умножителей 19, 21 и 23 и с опорным входом измерителя 27 фазы. Выход формирователя 17 косинусного опорного сигнала соединен с другим входом пятого умножителя 25, а выход умножителя 14 частоты соединен с импульсным входом измерителя 27 фазы и с измерителем 28 частоты.
Устройство работает следующим образом.
От преобразователей 1 и 2 сигналы, содержащие мгновенные значения составляющих вибрации ротора 3 (без постоянных составляющих), поступают на соответствующие квадраторы 4 и 5 л умножители 19 и 23. Квадраты значений этих сигналов передаются с квадраторов 4 и Ь в первый сумматор 6. Из сумматора 6 выходной сигнал подается на блок 7 извлечения корня, а выходной сигнал последнего, содержащий модули мгновенных значений вибрации ротора 3, поступает на пиковый детектор 8, который своим импульсом с импульсного выхода фиксирует момент максимального значения вибрации и запускает функциональный преобразователь 15.
Величина максимального модуля Smai вибрации в плоскости размещения первичных преобразователей 1 и 2 отображается регистратором 9, выводится на внешнее устройство измерения и одновременно сравнивается в пороговом блоке 10 с сигналом уставки нормирующего блока 11. Пр л превышении значения вибрации заданного уровня срабатывает сигнализатор 12. От датчика 13 метки импульсы с частотой вращения ротора 3 поступают на умножитель 14 частоты импульсов и на- формирователи 17 и 18 косинусного и синусного опорных сигналов частоты со вращения ротора 3. С выхода умножителя 14 частоты последовательность импульсов более высокой частоты поступает на фукнциональный преобразователь 15
и на другие входы формирователей 17 и 18 на импульсные входы измерителя 27 фл -,ы и измерителя 28 частоты. В функциональном преобразователе 15 эта
последовательность импульсов управляет выдачей ня его выходе дискретных значении косинусоидалыюй функции, выраженных величиной напряжений. Этот сигнал с выхода функционального преобразозателя 15
Q поступает на один из входов умножителя 16, на другой его вход поступает сигнал модуля мгновенных значений вектора вибрации ротора 3 с блока 7 извлечения корня. Перемножение этих сигналов в умножителе 16 позволяет получить на его выходе сигнал
максимальной вибрации ротора 3 и радиальной плоскости. Разрешение на выдачу дискретных значений косинусоядальной функции, числр которых равно числу N импульсов за период вращения ритора 3 на выходе
0 умножителя 14 частоты, функциональным преобразователем 15 выдается один раз за период вращения ротора импульсом пико- РОГО детектора 8 в момент достижения пикового значения максимальной вибрацией. В этог момент функциональный преобразова5 гель 15 выдает значение косинуса, равное т-1. Одним из выходов устройства является выход умножителя 16 в виде переменного сигналя частоты вращения ротора с максимальной амплитудой вибрации в плоскости размещения преобразователей 1 и 2.
В формирователях 17 и 18 косинусного и синусного опорных сигналов последовательность импульсов с вьшн д умножителя 14 частоты преобразуется в каждом периоде рращения ротора 3 в сигналы вида i/i- aocos ut и t/2 aos/ncot, гад an - амплитуда, t - время.
Сигнал Lf2 aosinti t с выхода формирователя 18 синусного опорного сигнала подается на входы умножителей 19 и 23, на другие входы которых подаются сигналы пре0 образователей 1, 2.
После перемножения этих сигналов в умножителях 19 и 23 и фильтрации полученных сигналов фильтрами 20 и 24 низкой частоты они поступают на входы умножителей 21 и 25 соответственно, на второй
э вход третьего умножителя 21 подается сигнал с формирователя 18 синусного опорного сигнала, а на второй зход пятого умножителя 25 подается сигкал с формирователя 17 косинусного опорно о сигнала. После перемножения этих сигналов в умножителях 2 и 25 и суммирования полученных сигналов во втором сумматоре 22 получаем сигнал вида S Sm-sin().
Амплитуда Sm и фаза ср этого сигнала равны амплитуде и фазе оборотной составляю5 щей виброперемещения ротора 3. Амплитуда этого сигнала измеряется измерителем 26 амплитуды, выполненным, например, в виде пикового вольтметра, а фаза - измерите0
5
0
лем 27 фазы, например цифровым фазометром с преобразованием фаза-время. Для этого промежуток времени, например между задними фронтами синусоид сигналов S и Иъ, поступающих на сигнальный и опорный входы измерителя 27 фазы, заполняется последовательностью импульсов умножителя 14 частоты, поступающей на импульсный вход измерителя 27 фазы и одновременно на измеритель 28 частоты, отображающий частоту вращения ротора 3.
Формула изобретения
Устройство для контроля максимального отклонения ротора от оси турбомашины по авт. св. № 1232833, отличающееся тем, что, с целью повышения точности путем определения амплитуды, фазы и частоты оборотной- составляющей отклонения, оно снабжено формирователями синусного и косинусного опорных сигналов, последовательно соединенными вторым умножителем с двумя входами,
5
0
первым фильтром низкой частоты и третьим умножителем с двумя входами, последовательно соединенными четвертыми умножителем с двумя входами, вторым фильтром низкой частоты и пятым умножителем с двумя входами, вторым сумматором и измерителями частоты, амплитуды и фазы, причем входы второго и четвертого умножителей подключены соответственно к выходам первого и второго первичных преобразователей и соединены с выходом формирователя синусного опорного сигнала, подключенным также к входам третьего умножителя и измерителя фазы, входы формирователей синусного и косинусного опорных сигналов подсоединены к .датчику метки и к выходу умножителя частоты, соединенному также с входами измерителей частоты и фазы, выход формирователя косинусного опорного сигнала подключен к входу пятого умножителя, выходы третьего и пятого умножителей соединены с входами второго сумматора, выход которого подключен к входам измерителей фазы и амплитуды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля максимального отклонения ротора от оси турбомашин | 1990 |
|
SU1728502A2 |
| Устройство для определения вектора дисбаланса | 1990 |
|
SU1755081A1 |
| Устройство для балансировки | 1991 |
|
SU1793291A1 |
| Устройство для контроля максимального отклонения ротора от оси турбомашины | 1990 |
|
SU1726786A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИСБАЛАНСА РОТОРОВ | 2016 |
|
RU2643170C1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Измеритель симметричных составляющих напряжений в трехфазной промышленной сети | 1980 |
|
SU875309A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |
Изобретение относится к теплоэнергетике и усовершенствует изобретение по авт.св.N 1232833. Изобретение позволяет повысить точность контроля путем определения амплитуды фазы и частоты оборотной составляющей отклонения ротора в радиальной плоскости. Для этого оно снабжено формирователями 17 и 18 косинусного и синусного опорных сигналов, вторым умножителем 19, соединенным через первый фильтр 20 низкой частоты с третьим умножителем 21, четвертым умножителем 23, соединенным через второй фильтр 24 низкой частоты с пятым умножителем 25, вторым сумматором 22, измерителем 26 амплитуды, измерителем 27 фазы и измерителем 28 частоты вращения. Выход второго сумматора 22 соединен с выходами третьего и пятого умножителей 21 и 25 сигналов, выход умножителя 14 частоты соединен с входом измерителя 28 частоты вращения ротора 3, с первыми входами формирователей 17 и 18 косинусного и синусного опорных сигналов и с импульсным входом измерителя 27 фазы. Другие входы формирователей 17 и 18 косинусного и синусного опорных сигналов соединены с выходом датчика 13 метки
в свою очередь выход формирователя 18 синусного опорного сигнала подсоединен к первым входам второго, третьего и четвертого умножителей 19, 21 и 23 сигналов и к опорному входу измерителя 27 фазы, выход формирователя 17 косинусного опорного сигнала соединен с одним из входов пятого умножителя 25, причем выход первого первичного преобразователя 1 соединен с входом второго умножителя 19, а выход второго первичного преобразователя 2 соединен с входом четвертого умножителя 23. 1 ил.
