Изобретение относится к радиотехнике и может быть использовано в различных радиолокационных системах.
Цель изобретения - повышение разрешающей способности при определении направлений прихода плоских волн различной интенсивности,
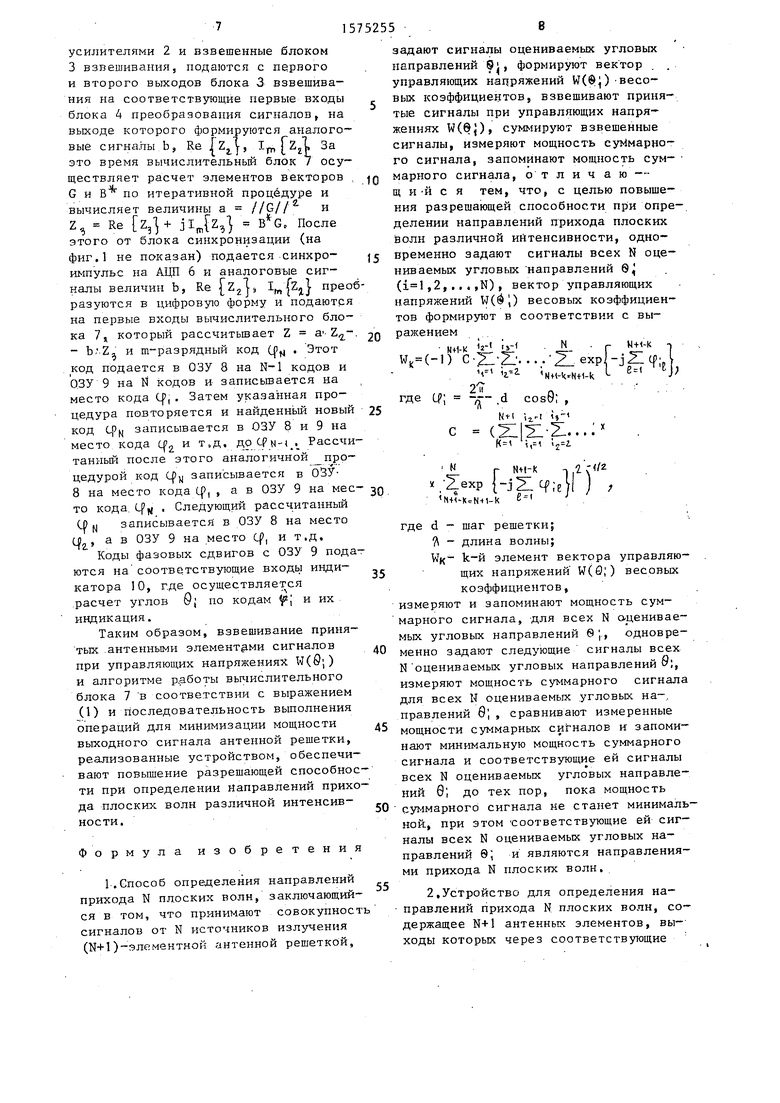
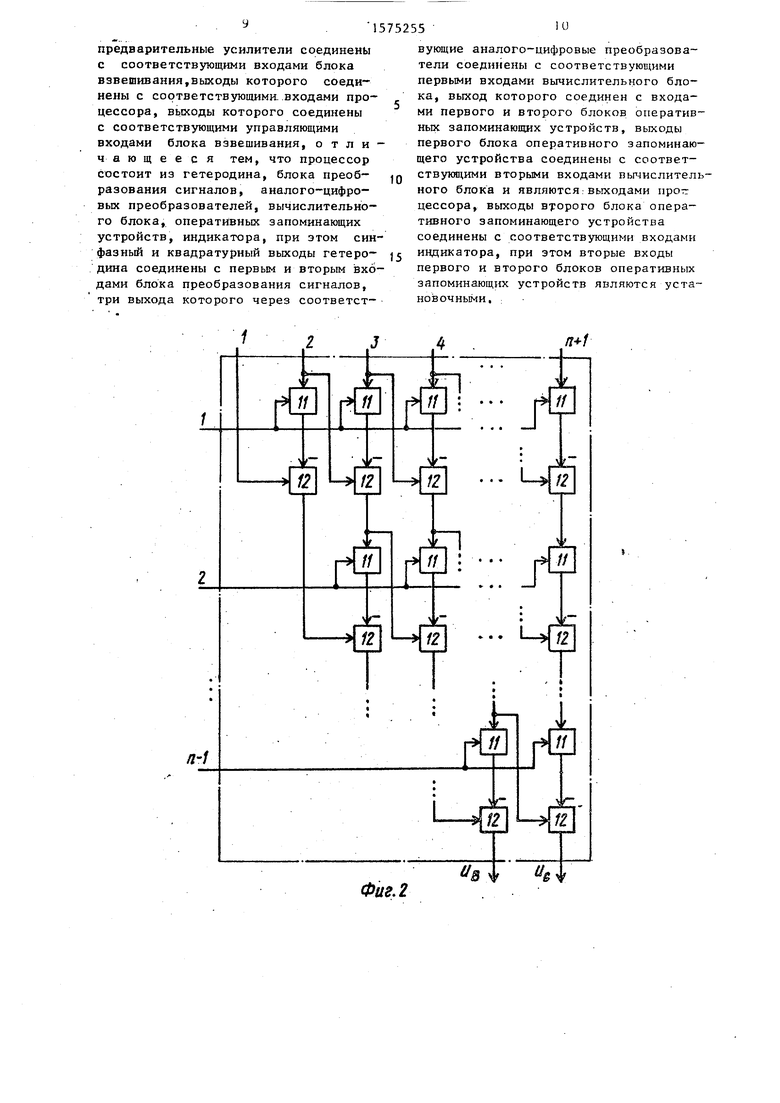
На фиг.1 представлена структурная схема устройства, реализующего предлгаемый способ; на фиг.2 - структурна схема блока взвешивания; на фиг.З - структурная схема блока преобразования сигналов.
Устройство для определения направлений прихода N плоских волн содержит N+1 антенных элементов 1, N+1 предварительных усилителей 2, блок 3 взвешивания, блок 4 преобразования сигналов (БПС),гетеродин 5, аналого- цифровые преобразователи (АЦП) 6, вычислительный блок 7, первый 8 и второй 9 блоки оперативных запоминающих устройств (ОЗУ), индикатор 10
Блок 3 взвешивания содержит N-1 рядов электронно-управляемых фазовращателей 11, блоков 12 вычитания.
Блок 4 преобразования сигналов (БПС) содержит смесители 13, перемножители 14, фильтры 15 низкой частоты (ФНЧ), блоки 16 суммирования и делитель 17 на два.
Ъ Способ определения направлений
прихода N плоских волн и предлагаемое устройство основаны на следующих соотношениях. Пусть в дальней зоне антенной решетки АР в одной полуплоскости от нее имеется N точечных источников ичлучения, имеющих различное угловое положение относительно АР. Среда распространения однородна, В уткой полосе частот на
X
0
5
интервале времени Ј0, Т (uf Т 1) АР принимает сигналы источников, временная структура которых неизвестна. Расстояние между соседними элементами АР d не более /2. Длина АР такова, что за время прохождения сигнала вдоль.АР огибающая сигнала почти не меняется. Собственные шумы элементов АР есть независимые гауссов- ские процессы с равномерным спектром в полосе наблюдения. Тогда наблюдаемые сигналы можно представить в ви- 0 де вектор-столбца
X(t) S(cf) F(t) + N(t), t e О, Т, где X (t) - сигнал на выходе 1-го
элемента АР, ,1,2,..., N+1;
FR(t) - сигнал, наводимый k-м источником излучения в первом элементе АР, k 1,2,...,N;
SK - угол между осью АР и направлением на k-и источник излучения; Cf - вектор фазовых сдвигов tf (cf,,c,...,qO;
7 9Т
Чк ft . d.cosQK;
S(() - матрица размера (to+l)N, k-й столбец которой имеет яип С1 fi(t gJ1
ВИД (, 1 , С , t , . . . ,
)T;
5
0
5
0
5
GQ - мощность собственного
шума в элементе АР. Функция правдоподобия в данном случае имеет вид
Ltf.fcO.)/) - ()-AtT(M,
««pf-M T( ||x(t) - s(if) -(t)fdt). с о i
Для получения максимально правдоподобных оценок необходимо найти
Cf argcf min W (cj) R W((f) , (1)
fa.b
0K arccos (-TJ,--) , k 1,2,...,N.
Здесь
W((f) - вектор комплексного взвешивания сигналов АР, причем
V э-1
WK(if) - (-1)
N-fi- k Mti-K
Z Z...
г
xг Nti-к,.TI .
x 21 Z Cf;EUr
(Mt1-K N-n-Ke l
N+i ii-l U-l
с ( ZTIZ-Z ...
;,-. .
. Г .N.K i.trt/j
x; Slexpj-jZ el ) } «N+,. L e-« / x
- ковариационная матрица наблюдаемых сигналов
- - - J
lt(t). x(t)dt;
знак комплексного сопряжения и транспонирования.
Предложенный способ реализует найденную процедуру максимально правдоподобного оценивания угловых направлений прихода N плоских волЪ.
Работа устройства основана на процедуре покоординатного поиска экстремальной точки (минимума) выражения (1), которое может быть представлено в виде
I g .
- ,
где g W((f)/C G - e ; G-(0. (-I) Г.,...,
N-
,
( (T, {)
, 1) ;
T A
В (G., С},...,СП, 1, 0) GT
f - знак сдвига элементов вектора
на один элемент влево. Взяв производную I по С(ц , получим p 8l J.- Z4-Z,} где Z a
b - ( + );
Z2 Z5 .
Приравняв производную к нулю, получим
/Z/ sin(arg Z +(N) Im|Zz- Z3j.
Эта функция от Cfy имеет один минимум и один максимум. Так как
a Z - Ъ1Zj;
IIGH1 ;
СЬ,
Z, Zj, Z от tf „ не зависят, а /Iff/ f то для Јого, чтобы экстремум был минимумом, должно выполнять- ся условие j(j + arg . Отсюда имеем
arc sin ( - arg Z.
mipj Л |
Подставив найденное вместо Lf, можно повторить определение нового по аналогичной процедуре и подставить его вместо и т.д. до (ffl-i Затем вновь определить Ц1 $min и подставить его вместо Lf, и т.д. до 5 тех пор, пока I, или, что то же, W (tp) R W(() не станет минимальным. Блок 3 взвешивания обеспечивает формирование сигналов U В .X(t) и
0
U (t).
В
Блок 4 преобразования сигналов
формирует сигналы
ь - -Г -т 1 (
-|- ( + );
+ ФВ
т
dt
V e JlJVr - J U6- B dt,
Вычислительньпг блок 7 по заданным , i 1,2,...,N-1 определяет вектот- ры G и В. При этом вектор G вычисляется простой итеративной процедурой
5
0 7
Ео (0,0,...,0,1); ; Е( Е0- (E0f) rj(f ;
ill, Ё; - (Е;{) №, ,2,. N-2;
-J4w-i
Кроме того, вычислительный блок ычисляет Е а //G//S
arcsin
G - EN, - EN.2 - (Ещ.г) I
вычисляет величины
1 Z a-Zi - Ъ-23;
arcsin ({lf--) - «8 Z
Устройство работает следующим 5 образом.
ОЗУ 9 обнуляется. В ОЗУ 8 записываются m-разрядные коды фазовых сдвигов блока 3 взвешивания, соот0 ветствующие равномерному начальному заданию оцениваемых угловых направлений 0;, i 1,2,...,N-1. Коды фазовых сдвигов подаются на блок 3 взвешивания, где устанавливаются фазовые
е сдвиги электронно-управляемых фазовращателей 11 и на вторые входы вычислительного блока 7. На интервале времени ГО, xj сигналы антенных элементов 1, усиленные предварительными
усилителями 2 и взвешенные блоком 3 взвешивания, подаются с первого и второго выходов блока 3 взвешивания на соответствующие первые входы блока 4 преобразования сигналов, на выходе которого формируются аналоговые сигнапы b, Re , I За тельный блок /
ото время вычислительный
осуществляет расчет элементов векторов г
G и В по итеративной процедуре и вычисляет величины а //С//г и Z, Re ,} , После этого от блока синхронизации (на фиг.1 не показан) подается синхро- импульс на АЦП 6 и аналоговые сигналы величии b, Re |Z2Ta преобразуются в цифровую форму и подаются на первые входы вычислительного блока 7, который рассчитывает Z a - b Z, и m-разрядный код (у# . Этот код подается в ОЗУ 8 на N-1 кодов и ОЗУ 9 на N кодов и записывается на место кода Ср( . Затем указанная процедура повторяется и найденный новый код СР| записывается в ОЗУ 8 и 9 на место кода и т.д. Рассчитанный после этого аналогичной процедурой код ср записывается в ОЗУ- 8 на место кода Ц, , а в ОЗУ 9 на мес то кода Lpjj . Следующий рассчитанный CD N записывается в ОЗУ 8 на место СО , а в ОЗУ 9 на место Cf, и т.д.
Коды фазовых сдвигов с ОЗУ 9 подаются на соответствующие входы индикатора 10, где осуществляется расчет углов 0; по кодам J и их индикация.
Таким образом, взвешивание принятых антенными элементами сигналов при управляющих напряжениях W(Q;) и алгоритме работы вычислительного блока 7 в соответствии с выражением (1) и последовательность выполнения операций для минимизации мощности выходного сигнала антенной решетки, реализованные устройством, обеспечивают повышение разрешающей способности при определении направлений прихода плоских волн различной интенсивности.
Формула изобретения
1.Способ определения направлений прихода N плоских волн, заключающийся в том, что принимают совокупност сигналов от N источников излучения (N+1)-элементной антенной решеткой,
задают сигналы оцениваемых угловых направлений $, формируют вектор управляющих напряжений W(©}) весовых коэффициентов, взвешивают принятые сигналы при управляющих напряжениях W(6{), суммируют взвешенные сигналы, измеряют мощность суммарного сигнала, запоминают мощность суммарного сигнала, отличаю - щ и и с я тем, что, с целью повышения разрешающей способности при определении направлений прихода плоских волн различной интенсивности, одновременно задают сигналы всех N оцениваемых угловых направлений © (,2,.,.,N), вектор управляющих напряжений W($ ,) весовых коэффициентов формируют в соответствии с выражением
М+1-К У
-1) C-21-2J.
г1
N
27
. 21 exp
NtHoNtl-k
™- d cos9; ,
N-H 1гг1 i,-l
с (...:
K i i,
tN+1-K т чЈ 4
. м r к/Zexp {-j
N+ -luN-M-k
fHl-K
где d - шаг решетки; A - длина волны;
W«- k-й элемент вектора управляющих напряжений W(6;) весовых коэффициентов,
измеряют и запоминают мощность суммарного сигнала, для всех N аценивае- мых угловых направлений G|, одновременно задают следующие сигналы всех N оцениваемых угловых направлений |, измеряют мощность суммарного сигнала для всех К оцениваемых угловых направлений 0, , сравнивают измеренные мощности суммарных сигналов и запоминают минимальную мощность суммарного сигнала и соответствующие ей сигналы всех N оцениваемых угловых направлений 0; до тех пор, пока мощность суммарного сигнала не станет минимальной., при этом соответствующие ей сигналы всех N оцениваемых угловых направлений 9; и являются направлениями прихода N плоских волн.
2,Устройство для определения направлений прихода N плоских волн, содержащее N+1 антенных элементов, выходы которых через соответствующие
предварительные усилители соединены с соответствующими входами блока взвешивания,выходы которого соединены с соответствующими- входами процессора, выходы которого соединены с соответствующими управляющими входами блока взвешивания, отличающееся тем, что процессор состоит из гетеродина, блока преобразования сигналов, аналого-цифровых преобразователей, вычислительного блока, оперативных запоминающих устройств, индикатора, при этом синфазный и квадратурный выходы гетеродина соединены с первым и вторым входами блока преобразования сигналов, три выхода которого через соответствующие аналого-цифровые преобразователи соединены с соответствующими первыми входами вычислительного бло- ка, выход которого соединен с входами первого и второго блоков оперативных запоминающих устройств, выходы первого блока оперативного запоминающего устройства соединены с соответствующими вторыми входами вычислительного блока и являются выходами процессора, выходы второго блока оперативного запоминающего устройства соединены с соответствующими входами
индикатора, при этом вторые входы первого и второго блоков оперативных запоминающих устройств являются установочными.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГОВАНИЯ С ПОВЫШЕННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ | 2004 |
|
RU2285938C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ МНОГОЛУЧЕВЫХ СИГНАЛОВ | 2005 |
|
RU2309422C2 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ДОПЛЕРОВСКОЙ РЛС С ЛИНЕЙНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2014 |
|
RU2569843C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ МНОГОЛУЧЕВОЙ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКОЙ МОДЕЛИ СПЕКТРА ПРОСТРАНСТВЕННЫХ ЧАСТОТ ВХОДНОГО СИГНАЛА | 2017 |
|
RU2650096C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ МНОГОКАНАЛЬНОЙ ФАЗОВОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2527943C1 |
Изобретение относится к радиотехнике. Цель изобретения - повышение разрешающей способности при определении направлений прихода плоских волн различной интенсивности. Устройство, реализующее способ определения направлений прихода N плоских волн содержит (N+1) антенных эл-тов 1, (N+1) предварительных усилителей 2, блок 3 взвешивания, блок 4 преобразования сигналов, гетеродин 5. АЦП 6, вычислительный блок 7, блоки 8 и 9 оперативных запоминающих устройств и индикатор 10. Данные способ и устройство реализуют процедуру максимально правдоподобного оценивания угловых направлений прихода N плоских волн. Работа устройства основана на процедуре покоординатного поиска экстремальной точки (минимума) заданного выражения. Цель достигается за счет обеспечения взвешивания принятых антенными эл-тами 1 сигналов при заданных управляющих напряжениях и алгоритме работы вычислительного блока 7 в соответствии с заданным выражением, а также за счет последовательности выполнения операций для минимизации мощности выходного сигнала антенной решетки. 2 с.п. ф-лы, 3 ил.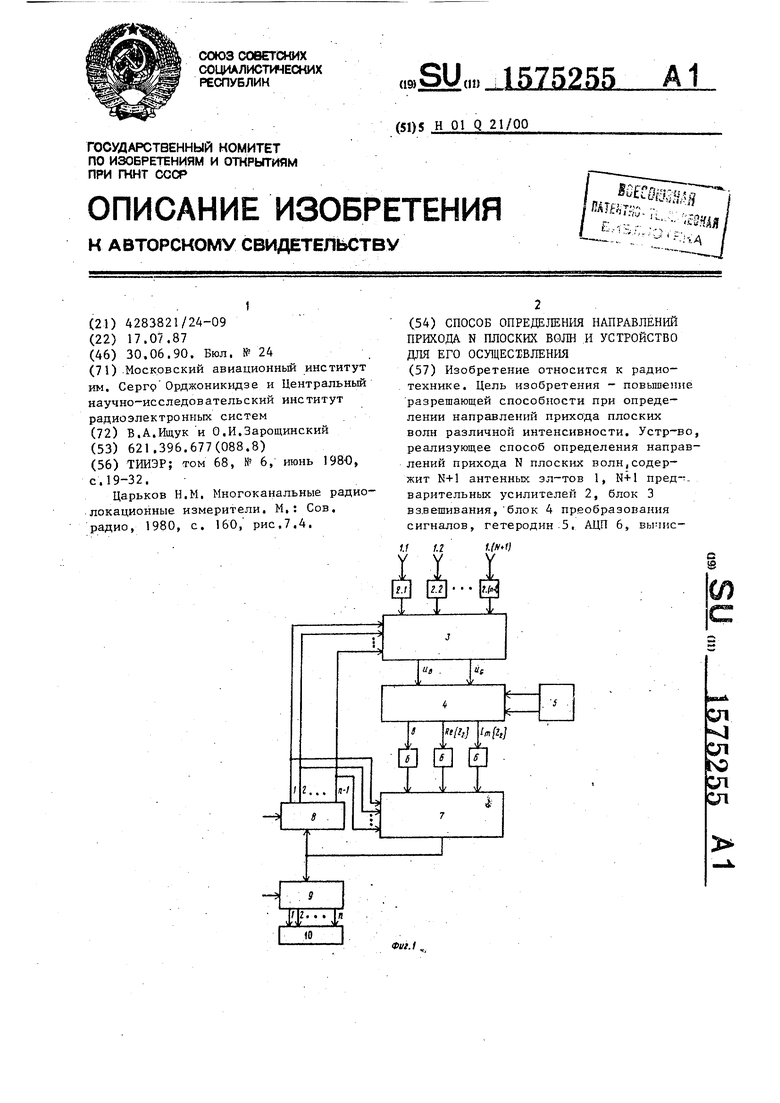
Фиг. 2
BinQrt
CMCJrt
e&
/mfcJ
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
| Царьков Н.М | |||
| Многоканальные радиолокационные измерители | |||
| М,: Сов | |||
| радио, 1980, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
