Изобретение относится к радиотехнике и может быть использовано при пеленгации источников радиоизлучений (ИРИ) коротковолнового (KB) -диапазона, в частности при многоканальной фазовой пеленгации ИРИ с применением многоэлементных антенных решеток (АР).
В KB -диапазоне широко применяются средства пеленгования и местоопределения ИРИ из одной точки с использованием многоэлементных АР [1], в том числе с кольцевыми АР [2].
Обработка принятых сигналов при пеленговании ИРИ позволяет реализовать предельные возможности пеленгационных систем по точности, дальности и быстродействию.
Известен способ обработки сигналов при многоканальной фазовой пеленгации ИРИ KB-диапазона, используемый в патенте RU №2096797 [3].
В ходе обработки принятые сигналы селектируют по частоте и поканально сравнивают спектральные характеристики. По результатам сравнения судят о значении пеленга.
Недостатками известного способа обработки сигналов являются ограниченное быстродействие при априорно неизвестном районе действия ИРИ и низкая точность. Это объясняется необходимостью применения при обработке сигналов многократного сканирования диаграммы направленности АР и проведения двумерных итераций.
Известен способ обработки сигналов при многоканальной фазовой пеленгации ИРИ KB-диапазона, используемый в патенте RU №2210088 [4].
В ходе обработки последовательно выполняют операции упорядочивания, уплотнения, усиления, частотной селекции и демодулирования, разуплотнения, вычисления угла прихода квазигармонического сигнала по значению арктангенса от отношения U2/U1, где в качестве управляющих сигналов fi(t) используют упорядоченную пару сигналов из множества упорядоченных пар ортогональных сигналов.
Способ позволяет существенно повысить точность пеленгования по сравнению с первым аналогом. Недостатком способа является ограниченное быстродействие, вызванное необходимостью выполнения процедур сканирования и двумерных итераций. Это связано с подбором соответствующих пар, обладающих одновременно взаимной частотной ортогональностью между компонентами с разными частотами и взаимной фазовой ортогональностью между компонентами с одинаковыми частотами. Кроме того, известный способ применим к ИРИ с квазигармоническими сигналами и для его реализации требует использования радиоприемного устройства частотно-модулированных сигналов. Это ограничивает область его применения.
Наиболее близким по технической сущности к заявляемому объекту является способ обработки сигналов при фазовой пеленгации ИРИ KB-диапазона, сущность которого описана в патенте RU №2432580 [5] (прототип).
Способ включает частотную селекцию принятого сигнала и измерение фазы сигнала на каждом элементе АР в ходе определения пеленга. Линию пеленга находят в плоскости пеленгационной антенны, а по результатам весовой обработки формируют вспомогательную плоскость, ортогональную плоскости пеленгационной антенны и проходящую через полученную линию пеленга. Способ позволяет повысить быстродействие и существенно увеличить точность пеленгования при дислокации ИРИ на земной поверхности.
Однако при дислокации ИРИ в трехмерном пространстве и использовании объемных АР быстродействие пеленгования ИРИ KB-диапазона недостаточно. Это проявляется наиболее заметно при использовании мобильных пеленгаторов, кратковременной работе ИРИ и размещении ИРИ на подвижных летательных аппаратах (самолеты, радиозонды и т.п.). Компенсация возникающих ошибок пеленгования требует в ходе обработки проведения процедур сканирования и двумерных итераций, что во многих случаях становится проблематичным.
Целью изобретения является повышение быстродействия обработки сигналов ИРИ KB-диапазона, находящихся в трехмерном пространстве, при многоканальной фазовой пеленгации.
Поставленная цель достигается за счет того, что в известный способ обработки сигналов при многоканальной фазовой пеленгации ПРИ KB-диапазона, включающий частотную селекцию принятого сигнала и измерение фазы сигнала на каждом элементе АР, введены операции, в ходе которых на частоте ИРИ оценивают фазу сигнала в геометрическом центре АР, на каждом элементе АР определяют фазу сигнала относительно фазы в геометрическом центре АР, формируют матрицу координат и матрицу направленности АР, определяют сферическую поверхность нахождения вектора прихода плоской волны, находят вспомогательный вектор, определяющий центр области возможных ошибок измерения волнового вектора, строят семейство подобных эллипсоидов ошибок с общим найденным центром, определяют точку касания эллипсоида из построенного семейства с сферической поверхностью, после чего находят вектор прихода сигнала и соответствующие ему азимут и угол места.
Предлагаемый способ обработки сигналов эа счет введения новых операций не требует процедур сканирования и двумерных итераций, что и позволяет повысить быстродействие при пеленговании ИРИ KB-диапазона при их размещении над земной поверхностью в трехмерном пространстве.
Сочетание отличительных признаков и свойства предлагаемого способа обработки сигналов при фазовой пеленгации ИРИ KB-диапазона из патентных источников не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
На фиг.1 приведена функциональная схема устройства обработки сигналов при фазовой пеленгации ИРИ KB-диапазона;
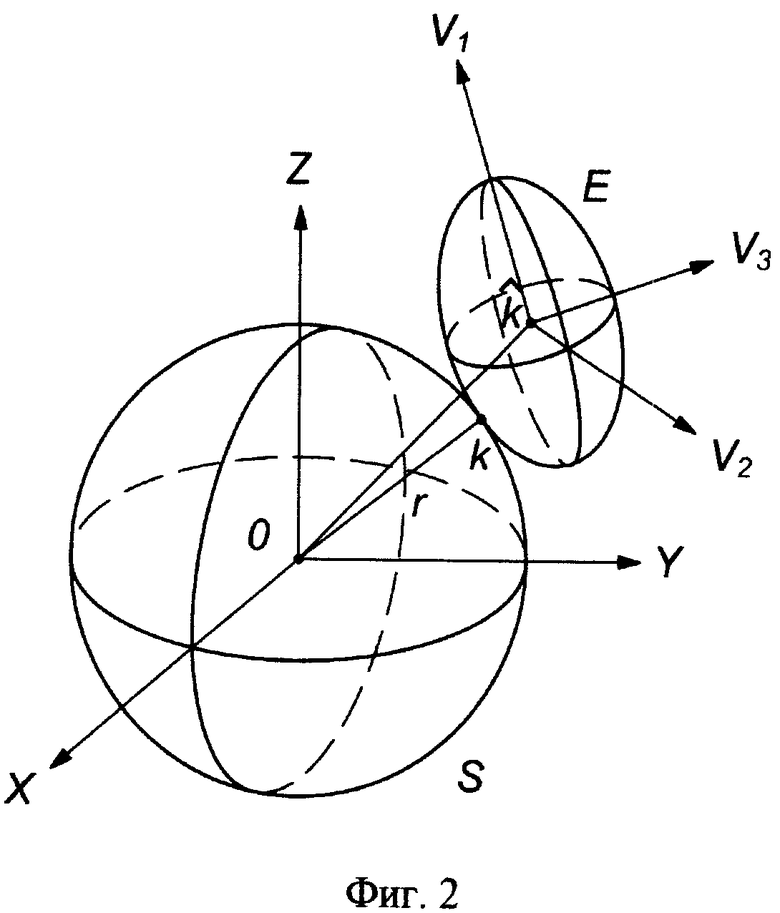
на фиг.2 - процесс векторного построения в ходе обработки сигналов ИРИ KB-диапазона.
Устройство обработки сигналов при фазовой пеленгации ИРИ KB-диапазона содержит N радиоприемников 1, выход каждого из которых соединен с входом фазометрического модуля 2, а на управляющие входы подается сигнал с выхода блока 3 опорного генератора. Выход фазометрического модуля 2 через модуль 4 формирования матриц элементов АР соединен с первым входом модуля 5 вычислителя параметров пеленга, через модуль 6 определения векторов сигнала подключен к второму входу и через модуль 7 определителя дисперсии ошибок соединен с третьим входом модуля 5 вычислителя параметров пеленга, при этом входы радиоприемников 1 являются входами сигнала ИРИ, а дополнительный вход модуля 4 формирования матриц элементов АР является дополнительным входом устройства обработки сигналов при фазовой пеленгации ИРИ KB-диапазона.
Способ обработки сигналов при фазовой пеленгации ИРИ KB-диапазона реализуется следующим образом.
При обработке сигналов в ходе пеленгования ИРИ в трехмерном пространстве известным способом приходится производить процедуры сканирования и двухмерных итераций, в том числе:
- выбирать шаг двумерной сетки по углам прихода сигнала в и ft (азимут и угол места), причем достаточно малый для исключения пропуска окрестности глобального минимума функционала невязки;
- для каждой точки сетки производить расчет функционала невязки;
- выбирать точку сетки с минимальным значением функционала невязки в качестве начального приближения для итераций;
- выполнять итерационный поиск минимума функционала невязки в окрестности выбранной точки, пока уточнение углов азимута и места ИРИ на очередном шаге не станет меньше допустимой погрешности.
Приведенные процедуры требуют значительного времени обработки сигнала ИРИ и при кратковременности излучения, а также быстрого перемещения обеспечение пеленгования с необходимой точностью становится проблематичным.
При обработке предлагаемым способом сигнал ИРИ поступает на вход каждого радиоприемника 1 в канале элемента АР устройства (фиг.1). Блок 3 опорного генератора - общий для всех радиоприемников 1, каждый из которых обеспечивает частотную селекцию принятого сигнала ИРИ.
С выходов каждого радиоприемника 1 сигнал подается на вход фазометрического модуля 2, в каналах которого сигнал детектируется по фазе. Результирующие сигналы через сигнальную шину поступают на вход модуля 4 формирования матриц элементов АР.
Модуль 4 осуществляет оценку фазы сигнала в геометрическом центре АР:
где - N- количество антенных элементов;
и формирует матрицу координат и матрицу направленности АР.
Фазы сигнала на элементах АР относительно фазы в центре АР:
Координаты элементов АР вводятся в модуль 4 через дополнительный вход устройства обработки.
Матрица координат элементов АР:
где - xi, yi, zi - декартовые координаты i-го элемента АР, причем
Матрица направленности АР:
- симметричная неотрицательно определенная матрица размера 3×3,
где Т - символ транспонирования.
С выхода модуля 4 формирования матриц элементов АР информация подается на вход модуля 6 определения векторов сигнала, на вход модуля 7 определения дисперсии ошибок и непосредственно - на первый вход модуля 5 вычислителя параметров пеленга.
С помощью модуля 6 определяется сферическая поверхность нахождения трехмерного волнового вектора k с центром в начале координат
где - λ - длина волны в метрах, λ=300/F;
F - частота сигнала в МГц,
С помощью модуля 7 находится вспомогательный вектор 
Вспомогательный вектор

позволяет обеспечить безусловный минимум квадратичному функционалу Ф(k) невязки фазовых измерений Ф(k)=(Ak-φ)T(Ak-φ). После перемножения и дополнения до «полного квадрата» [6, с.96, выражение 3.64] Ф(k) может быть представлен в виде:

где от k зависит только первое слагаемое. Поэтому задача поиска минимума функционала Ф(k) при условии (5) сводится к нахождению минимального эллипсоида из семейства (7), имеющего одну общую точку со сферой (5), то есть касающегося сферы.
Семейство подобных эллипсоидов с общим центром в точке

Результирующие данные модулей 4, 6 и 7 подаются на входы модуля 5 вычислителя параметров пеленга.
Для определения искомого вектора k прихода плоской волны в модуле 5 рассчитывается точка касания эллипсоида из семейства (7) с сферой (5). Для этого в модуле 5 осуществляются следующие операции:
- определяются собственные значения b1, b2, b3 матрицы В -неотрицательные вещественные числа, и соответствующий им ортонормированный набор собственных векторов ν1, ν2, ν3 матрицы В;
- осуществляется переход в систему координат, оси которой - собственные векторы матрицы В, и определяются координаты вспомогательного вектора 
где 
- для координат искомого вектора k=(k1, k2, k3)T в новой системе координат и параметра L составляется система уравнений:
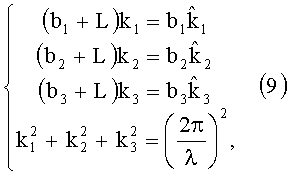
- подстановкой выражений для k1, k2, k3 из первых трех уравнений в четвертое система уравнений (8) сводится к алгебраическому уравнению 6-й степени с одним неизвестным параметром L:

- находится ближайший к 0 корень Z уравнения (9);
- подстановкой найденного значения для L в систему (8) из первых трех уравнений находятся координаты k1, k2, k3 искомого вектора k;
- осуществляется обратный переход в исходную систему координат:
Углы прихода сигнала (азимут и угол места):

Процесс векторного построения в ходе обработки сигнала ИРИ приведен на фиг.2, где S - сфера радиуса 
касания Е с S.
Модули 4-7 могут быть выполнены, например, на базе процессоров Texas Instruments TMS 320 С 6416/6713 и ПЛИС [6].
Таким образом, предлагаемый способ обработки сигналов при многоканальной фазовой пеленгации ИРИ KB-диапазона не требует процедур сканирования и двумерных итераций, за счет чего существенно повышается быстродействие пеленгования.
Количественные показатели повышения быстродействия зависят от условий пеленгования и в случаях проведенных экспериментов и моделирования находились в пределах 30-70 раз.
Экспериментальная проверка предлагаемого способа подтвердила правильность и достаточность технических решений.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Вартанесян В.А., Гойхман Э.Ш., Рогаткин М.И. Радиопеленгация. -М.: Воениздат, 1966 (с.74).
2. А.В.Дубровин. Потенциальная точность измерения направления на излучатель для пеленгационных средств с кольцевыми антенными решетками. «Антенны», 2006, выпуск 2(15), с.29-31.
3. Способ пеленгации радиосигналов и многоканальный пеленгатор. Патент RU 2096797, МПК G01S 3/14, опубликован 20.11.1997.
4. Способ одноканального радиопеленгования квазигармонических сигналов при минимальном числе неподвижных ненаправленных антенных элементов и устройство для его реализации. Патент RU №2210088, МПК G01S 3/54, опубликован 10.08.2003. Бюл. №22.
5. Способ определения координат источника радиоизлучений при амплитудно-фазовой пеленгации с борта летательного аппарата. Патент RU 2432580 С1, МПК G01S 1/08, приоритет 03.08.2010.
6. Марпл-мл. С.Л. Цифровой спектральный анализ и его приложения. -М.: Мир, 1990.
7. Потехин Д.С., Тарасов И.Е. Разработка систем цифровой обработки сигналов на базе ПЛИС. - М.: Горячая линия - Телеком, 2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2490661C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ В КОРОТКОВОЛНОВОМ ДИАПАЗОНЕ | 2010 |
|
RU2461015C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2603356C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2434239C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК НАЛОЖИВШИХСЯ ДРУГ НА ДРУГА РАДИОСИГНАЛОВ ОДНОЙ ЧАСТОТЫ | 2013 |
|
RU2551115C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2008 |
|
RU2380719C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГАЦИОННОЙ ПАНОРАМЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2528177C2 |
| Способ пеленгации широкополосных сигналов с повышенной разрешающей способностью | 2019 |
|
RU2752878C2 |
Изобретение относится к радиотехнике и может быть использовано при пеленгации источников радиоизлучений (ИРИ) коротковолнового (KB) диапазона. Достигаемый технический результат изобретения - повышение быстродействия обработки сигналов ИРИ KB диапазона, находящихся в трехмерном пространстве, при многоканальной фазовой пеленгации. Указанный результат достигается за счет того, что в заявленном устройстве осуществляют частотную селекцию принятого сигнала и измерение фазы сигнала на каждом элементе АР, затем на частоте ИРИ оценивают фазу сигнала в геометрическом центре АР, на каждом элементе АР определяют фазу сигнала относительно фазы в геометрическом центре АР, формируют матрицу координат и матрицу направленности АР, определяют сферическую поверхность нахождения вектора прихода плоской волны, находят вспомогательный вектор, определяющий центр области возможных ошибок измерения волнового вектора, строят семейство подобных эллипсоидов ошибок с общим найденным центром, определяют точку касания эллипсоида из построенного семейства с сферической поверхностью, после чего находят вектор прихода сигнала и соответствующие ему азимут и угол места. 2 ил.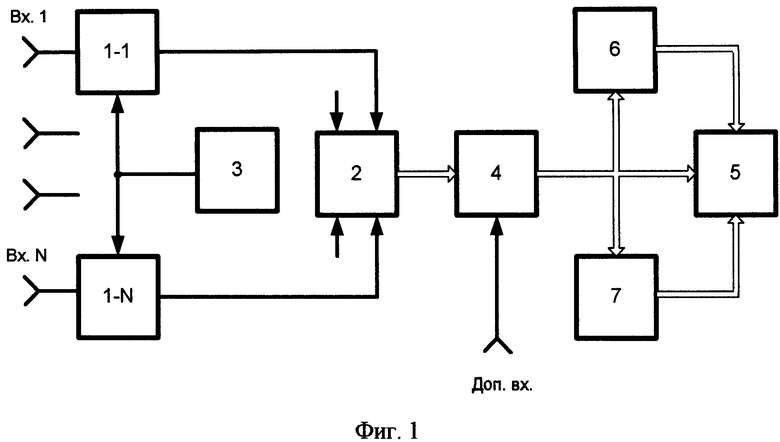
Устройство обработки сигналов при фазовой пеленгации источников радиоизлучений коротковолнового диапазона, содержащее N радиоприемников, выход каждого из которых соединен с входом фазометрического модуля, а на управляющие входы подается сигнал с выхода блока опорного генератора, отличающееся тем, что в него введены модуль вычислителя параметров пеленга, модуль определения векторов сигнала, модуль определителя дисперсии ошибок и модуль формирования матриц элементов антенной решетки, вход которого подключен к выходу фазометрического модуля, а выход соединен с первым входом модуля вычислителя параметров пеленга, через модуль определения векторов сигнала подключен к второму входу и через модуль определителя дисперсии ошибок соединен с третьим входом модуля вычислителя параметров пеленга, при этом входы радиоприемников являются входами сигнала источника радиоизлучений, а дополнительный вход модуля формирования матриц антенной решетки является дополнительным входом устройства обработки сигналов при фазовой пеленгации источников радиоизлучений коротковолнового диапазона.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ | 2006 |
|
RU2305295C1 |
| RU 2001107088 A, 10.03.2003 | |||
| МНОГОКАНАЛЬНЫЙ РАДИОПЕЛЕНГАТОР | 1995 |
|
RU2110809C1 |
| US 6469657 B1, 22.10.2002 | |||
| US 6148195 A, 10.05.1998 | |||
| WO 2005045459 A3, 07.07.2005 | |||
| US 6903685 B1, 07.06.2005 | |||

