/
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки на резонансные колебания вибромашины с кусочно-линейной характеристикой упругих связей | 1985 |
|
SU1351696A1 |
| РАСПИЛОВОЧНОЕ УСТРОЙСТВО | 2020 |
|
RU2822568C2 |
| Вибрационное устройство | 1987 |
|
SU1551430A1 |
| ПИЛЬНЫЙ МОДУЛЬ, ПИЛЬНЫЙ БЛОК И УСТРОЙСТВО ДЛЯ РАСПИЛОВКИ | 2005 |
|
RU2292259C2 |
| Способ возбуждения колебаний и устройство для его осуществления | 2015 |
|
RU2669163C2 |
| Многопильный модуль "Триумф" | 2020 |
|
RU2752272C1 |
| Вибрационное устройство | 1985 |
|
SU1279678A1 |
| Вибрационная машина | 1981 |
|
SU954112A1 |
| СПОСОБ РАСПИЛОВКИ ДРЕВЕСИНЫ ЛЕЗВИЙНЫМ ИНСТРУМЕНТОМ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2113347C1 |
| ПИЛЬНЫЙ МОДУЛЬ, ПИЛЬНЫЙ БЛОК И УСТРОЙСТВО ДЛЯ РАСПИЛОВКИ | 2013 |
|
RU2555798C1 |
Изобретение относится к машиностроению, в частности к механическим устройствам, применяемым для обработки, а именно распиловки, материалов. Цель - упрощение конструкции, а также повышение надежности устройства за счет выполнения приводного механизма в виде субгармонического возбудителя колебаний. При включении двигателя 4, установленного в корпусе 1 в направляющих 3 и имеющего номинальную угловую скорость ω, пильное полотно 6, жестко связанное с рабочим органом 2, после непродолжительного переходного процесса начинает совершать периодические устойчивые субгармонические колебания с частотой, в N раз меньшей частоты вращения эксцентрика 5, где N - порядок субгармонического режима, который определяется жесткостями упругого элемента 7 и упора 8. Субгармонические колебания возникают вследствие наличия жесткого упора 8, ограничивающего движение рабочего органа 2 в одну сторону, и упругого упора (упругого элемента 7), ограничивающего движение рабочего органа 2 в другую сторону. 1 з.п. ф-лы, 1 ил.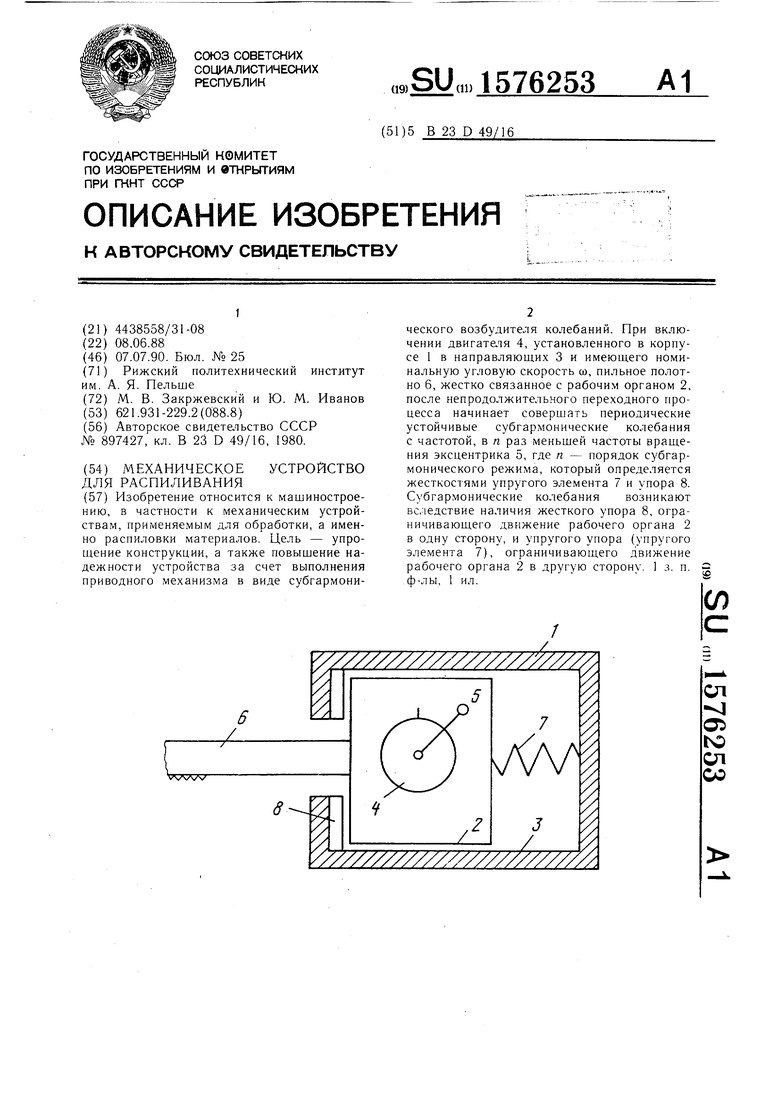
/ /////////////Т// ////
g
7
I
/
в
I
7
I
%
СЛ О Ю СП
со
J
/
i
Изобретение относится к машиностроению, в частности к конструкции механических устройств, применяемых для обработки, а именно распиловки кости, дерева, металла и других материалов.
Целью изобретения является упрощение конструкции за счет замены приводного механизма на субгармонический возбудитель колебаний.
На чертеже изображено устройство, общий вид.
Механическое устройство состоит из корпуса 1, рабочего органа 2, установленного в направляющих 3, с жестко закрепленным на нем двигателем 4. На валу последнего закреплена неуравновешенная масса (эксцентрик) 5. К рабочему органу 2 жестко прикреплено пильное полотно 6. С противоположной стороны рабочий орган 2 соединен с корпусом 1 с помощью упругого элемента 7. На корпусе 1 со стороны пильного полотна 6 расположен жесткий упор 8.
Устройство работает следующим образом.
При включении двигателя 4, установленного в корпусе 1 в направляющих 3, имеющего номинальную угловую скорость со, пильное полотно 6, жестко связанное с рабочим органом 2, после непродолжительного переходного процесса начинает совершать периодические устойчивые субгармонические колебания с частотой, в п раз меньшей частоты вращения эксцентрика 5, где п - порядок субгармонического режима, который определяется жесткостями упругого элемента 7 и упора 8:
(2пТ (+Ј«),
С2
с,
где Ci - жесткость упора 8;
С-2 - жесткость упругого элемента 7;
т - масса подвижных частей устройства;
со - угловая скорость вращения эксцентрика 5;
п - порядок субгармонического режима.
Эксцентрик 5 предназначен для возбуждения колебаний рабочего органа 2.
Субгармонические колебания возникают вследствие наличия жесткого упора 8, ограничивающего движение рабочего органа 2 в одну сторону, и упругого упора (упругого элемента 7), ограничивающего движение рабочего органа 2 в другую сторону.
Необходимый размах колебаний рабочего органа обеспечивается настройкой колебательной системы на соответствующий субгармонический резонанс, подбором величин эксцентриситета, диссипации и технической нагрузки. В первом приближении оценка размаха колебаний рабочего органа может быть проведена при решении дифференциаль0
ного уравнения, описывающего движение рабочего органа:
mx+f(x)+(b 1 +Ь2)х Ameco2cosc
где т - масса рабочего органа вместе с
двигателем;
f(x) - упругая характеристика восстанавливающей силы и при х.0, С2х при 0; х - координата центра масс рабочего
органа;
Cz - жесткость упругого элемента; С - жесткость упора; - величина, характеризующая технологическую нагрузку (действие) обрабатываемого материала на пильное полотно;
Ь - величина, характеризующая дис- 0сипацию (трение) при движении
органа в направляющих; Am- масса эксцентрика; е - эксцентриситет; со - частота вращения эксцентрика. Решая линеаризованное дифференциаль- 5 ное уравнение
x- -P x+2bx eiKB со2 coscoi,
где л °
VҐ+VI
т
О
линеаризованная частота свободных колебаний
bt+b2
р,
сэкв
получают
40
2Ь
где А -полуразмах колебаний на частоте, соответствующей основному резонансу (колебания совершаются с 5частотой вращения эксцентрика).
На субгармонических резонансах полуразмах колебаний увеличивается пропорционально частоте вращения эксцентрика. Причиной субгармонических режимов в соответствующих частотных диапазонах 0 при вынужденных колебаниях механических систем является наличие упругой связи с нелинейной упругой характеристикой, при этом законы движения субгармонических режимов оказываются близкими к свободным колебаниям. В данном случае такой нелинейной связью является совокупность упругого элемента и жесткого упора. Частота свободных колебаний рабочего органа определяется по формуле (1). При частоте
вращения эксцентрика, кратной частоте свободных колебаний PQ, реализуются устойчивые в целом (т. е. при произвольных начальных условиях, в том числе и нулевых) субгармонические резонансные режимы порядка 1/п, 1/2, 1/3, 1/4, 1/5). Колебания рабочего органа при этом совершаются с частотой, в целое число раз меньшей частоты вращения эксцентрика.
Использование изобретения дает возможность упростить конструкцию субгармонического возбудителя колебаний за счет замены редуктора и кривошипно-шатунного механизма на упругий элемент и жесткий упор, а также расширить функциональные возможности устройства за счет перехода с одного периодического режима на другой, используя при этом замену соответствующих упругих элементов.
Формула изобретения
0
| Механический лобзик | 1980 |
|
SU897427A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
