Фиг. 2
Изобретение относится к устройствам, предназначенным для испытания на вибрацию ручных машин, преимущественн пневматических перфораторов.
Цель изобретения - повышение точности за счет получения инерционных параметров зажимного устройства, соответствующих параметрам руки человека.
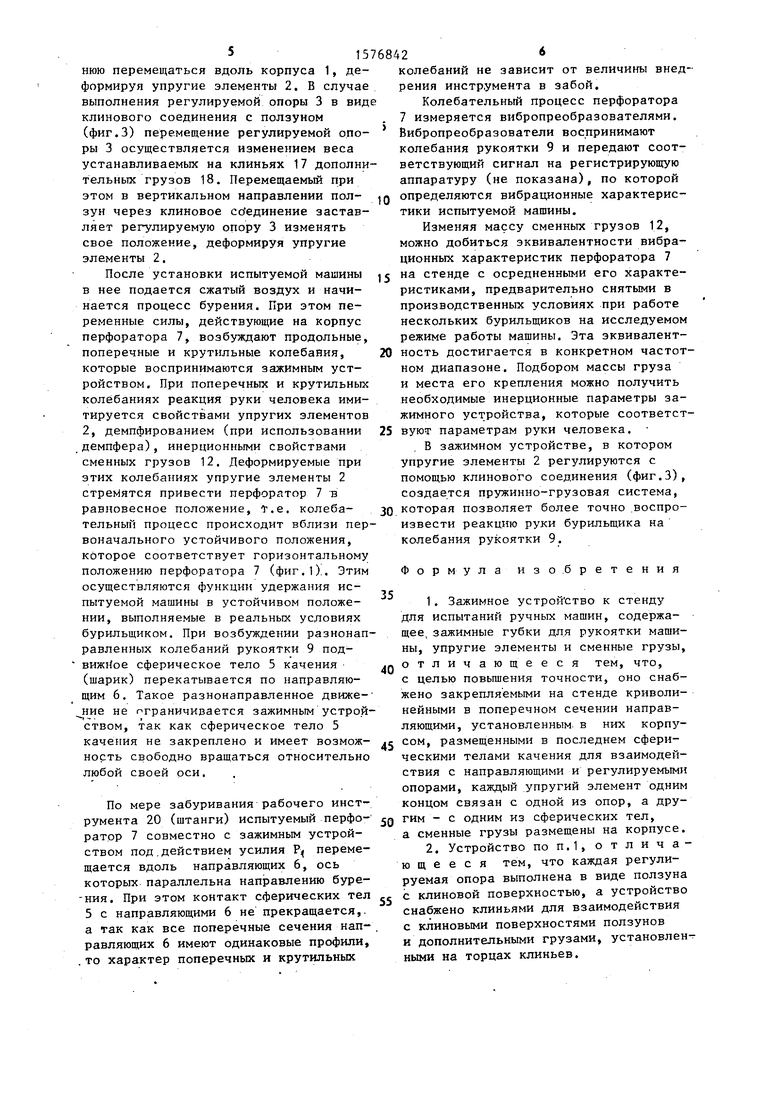
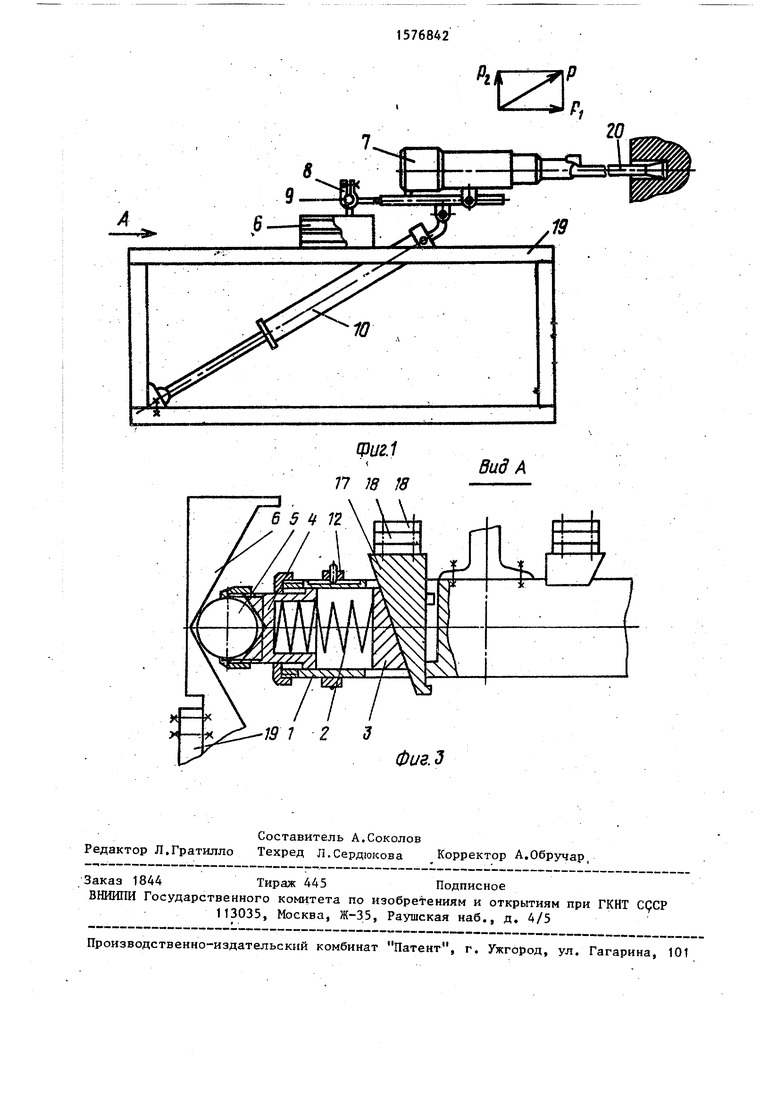
На фиг.1 представлен стенд для испытаний ручных машин, общий вид; на фиг.2 - вид А на фиг.1;на фиг.З - вид А на фиг.1 (с выполнением регулируемой опоры в виде клинового соединения) .
Зажимное устройство состоит из корпуса 1, в котором установлены упругие (упругодемпфирующие) элементы 2, упирающиеся одним своим концом в регулируемую опору 3, а другим через опору 4 с подвижным сферическим телом 5 качения (шариком) - в направляющие 6, ось которых параллельна продольной оси испытуемой машины, например перфоратора 7 (фиг.1). Направляющие 6 име- гот криволинейное поперечное сечение, например, в виде призмы. Корпус 1 жестко соединен с зажимными губками 8, в которых установлена рукоятка 9 перфоратора 7, который крепится к нак- лонной пневмоподдержке 10. На зажимны губках 8 в трех взаимно перпендикулярных плоскостях установлены шпильки 11 для крепления вибропреобразователей (не показаны). На корпусе 1 зажимного устройства размещены сменные грузы 12 Регулируемая опора 3, палец 13 которо входит в выполненный в корпусе 1 паз 14, имеет резьбовое соединение с винтом 15 с правой и левой резьбами. Винт 15 жестко соединен с маховиком 16. В другом варианте (фиг.З) регулируемая опора выполняется в виде ползуна с клиновой поверхностью и взаимодействующих с ним клиньев 17, на которых устанавливаются дополнительные грузы 18. Направляющие 6 зажимного устройства закрепляются на основании 19 стенда.
Работа устройства осуществляется следующим образом.
Для испытания ручного перфоратора 7 (фиг.1) его подсоединяют к наклонной пневмоподдержке 10, а рукоятку 9 устанавливают в зажимных губках 8. При подаче воздуха в пневмоподдержку 10 создается действующее на корпус перфоратора 7 усилие Р, которое разлагается на две составляющие: Р
0
,
5
0
5
вдоль оси бурения и Р - в вертикальном направлении. Сила Р, создает нажимное усилие в направлении бурения, а сила Р2 затрачивается на частичное или полное (в случае Р2 G) уравновешивание веса перфоратора 7 с буровым инструментом 20.
В случае, если испытания ручных машин должны проводиться в одинаковых условиях, усилие Р., , развиваемое пнев- моподдержкой 10, должно быть постоянным для машин разного типоразмера.- При этом сила Р2 не может быть строго равна весу испытуемой машины. Компенсация разности этих сил производится изменением деформации упругих элементов 2 (фиг.2). Так, если сила Рг G, рукоятка 9 перфоратора вместе с зажимным устройством может подняться вверх до тех пор, пока вертикальная составляющая силы взаимодействия упругих элементов 2 с направляющими 6 не компенсирует разность этих сил. Перемещением регулируемой опоры 3 упругие элементы 2 сжимаются, увеличивая силу взаимодействия их с направляющими 6. Так как поверхность направляющих 6 составляет острый угол с осью упругого элемента 2, то возрастающая при этом вертикальная составляющая этой силы возвращает зажимное устройство вместе с рукояткой 9 вниз до горизонтального положения перфоратора 7, что соответствует условиям испытания (по схеме, изображенной на фиг.1). При условии регулировка положения перфоратора 7 осуществляется аналогичным образом. Если вес перфоратора 7 значительно отличается от развиваемой пневмоподдержкой 10 силы Р, то необходимое усилие нажатия Р на забой при новом значении Р2 достигается изменением наклона пневмоподдержки 10 или давлением подаваемого в нее сжатого воздуха. Изменение и поддержание давления сжатого воздуха в пневмоподдержке 10 производятся клапаном-редуктором (не показан), установленным на пульте управления. Причем давление может поддерживаться постоянным независимо от положения самого перфоратора 7.
Перемещение регулируемой опоры 3 для изменения деформации упругих элементов 2 осуществляется вращением маховика 16 (фиг.2). При этом винт 15, имеющий резьбовое соединение с регулируемой опорой 3, заставляет послед10
нюю перемещаться вдоль корпуса 1, деформируя упругие элементы 2. В случае выполнения регулируемой опоры 3 в виде клинового соединения с ползуном (фиг.З) перемещение регулируемой опо- ры 3 осуществляется изменением веса устанавливаемых на клиньях 17 дополнительных грузов 18. Перемещаемый при этом в вертикальном направлении ползун через клиновое соединение заставляет регулируемую опору 3 изменять свое положение, деформируя упругие элементы 2.
После установки испытуемой машины в нее подается сжатый воздух и начинается процесс бурения. При этом переменные силы, действующие на корпус перфоратора 7, возбуждают продольные, поперечные и крутильные колебания, которые воспринимаются зажимным устройством. При поперечных и крутильных колебаниях реакция руки человека имитируется свойствами упругих элементов 2, демпфированием (при использовании емпфера), инерционными свойствами сменных грузов 12. Деформируемые при этих колебаниях упругие элементы 2 стремятся привести перфоратор 7 в
15
20
25
равновесное положение, т.е. колебательный процесс происходит вблизи первоначального устойчивого положения, которое соответствует горизонтальному положению перфоратора 7 (фиг.О. Этим осуществляются функции удержания испытуемой машины в устойчивом положении, выполняемые в реальных условиях бурильщиком. При возбуждении разнонаправленных колебаний рукоятки 9 под- сферическое тело 5 качения (шарик) перекатывается по направляющим 6. Такое разнонаправленное движе- .дне не ограничивается зажимным устройством, так как сферическое тело 5 качения не закреплено и имеет возможность свободно вращаться относительно любой своей оси.
По мере забуривания рабочего инструмента 20 (штанги) испытуемый перфо- ратор 7 совместно с зажимным устройством под действием усилия Р перемещается вдоль направляющих 6, ось которых параллельна направлению буре-ния. При этом контакт сферических тел 5 с направляющими 6 не прекращается,. а так как все поперечные сечения нэп- равляющих 6 имеют одинаковые профили,
. то характер поперечных и крутильных
0
5
0
5
0
5
0
5
Q
колебаний не зависит от величины внедрения инструмента в забой.
Колебательный процесс перфоратора 7 измеряется вибропреобразователями. Вибропреобразователи воспринимают колебания рукоятки 9 и передают соответствующий сигнал на регистрирующую аппаратуру (не показана) по которой определяются вибрационные характеристики испытуемой машины.
Изменяя массу сменных грузов 12, можно добиться эквивалентности вибрационных характеристик перфоратора 7 на стенде с осредненными его характеристиками, предварительно снятыми в производственных условиях при работе нескольких бурильщиков на исследуемом режиме работы машины. Эта эквивалентность достигается в конкретном частотном диапазоне. Подбором массы груза и места его крепления можно получить необходимые инерционные параметры зажимного устройства, которые соответствуют параметрам руки человека.
В зажимном устройстве, в котором упругие элементы 2 регулируются с помощью клинового соединения (фиг.З), создается пружинно-грузовая система, которая позволяет более точно воспроизвести реакцию руки бурильщика на колебания рукоятки 9.
Формула изобретения
1.Зажимное устройство к стенду для испытаний ручных машин, содержащее, зажимные губки для рукоятки машины, упругие элементы и сменные грузы, отличающееся тем, что,
с целью повышения точности, оно снабжено закрепляемыми на стенде криволинейными в поперечном сечении направляющими, установленным в них корпусом, размещенными в последнем сферическими телами качения для взаимодействия с направляющими и регулируемыми опорами, каждый упругий элемент одним концом связан с одной из опор, а другим - с одним из сферических тел, а сменные грузы размещены на корпусе.
2.Устройство по п.1, отличающее с я тем, что каждая регулируемая опора выполнена в виде ползуна с клиновой поверхностью, а устройство снабжено клиньями для взаимодействия
с клиновыми поверхностями ползунов и дополнительными грузами, установленными на торцах клиньев.
Фие.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| Виброгасящее устройство для переносного перфоратора | 1991 |
|
SU1813173A3 |
| Буровая установка | 1980 |
|
SU875016A1 |
| Виброгасящее устройство для ручного перфоратора | 1980 |
|
SU962604A2 |
| Легкая буровая установка | 1989 |
|
SU1671846A1 |
| СТЕНД ДЛЯ ФИЗИЧЕСКОГО МОДЕЛИРОВАНИЯ ГЕОМЕХАНИЧЕСКИХ ПРОЦЕССОВ | 2008 |
|
RU2367923C1 |
| Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1315848A1 |
| Способ определения точек крепления рукоятки ручного перфоратора | 1976 |
|
SU625030A1 |
| Стенд для испытания ручных шлифовальных машин на надежность | 1977 |
|
SU615383A1 |
| Буровое устройство | 1986 |
|
SU1411451A1 |
Изобретение относится к зажимным устройствам стендов для испытания ручных машин. Цель изобретения - повышение точности. При работе ручная машина закрепляется на пневмоподдержке и в зажимных губках 8, которые установлены на корпусе 1 с размещенными в нем регулируемыми опорами 3, взаимодействующими через упругие элементы 2, в корпусе размещены сферические тела 5 качения с криволинейными в поперечном сечении направляющими 6, что обеспечивает подачу инструмента. 3 ил.
| Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1226100A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| нститут ельсинсти и техн, СР 4 | |||
| Buff А | |||
