Фиг.1
тор 1 питания вырабатывает напряжение, которое подается через коммута- тор 5 на измерительный мост, образованный одним из датчиков 12-17 линейных перемещений и соответствующим ему отсчетным компенсатором (6-11). Выходной сигнал с моста подается на фазовый детектор 2 и индицируется отсчетным прибором 3. На отсчетных компенсаторах 20-22 устанавливают значения соответственно Kt, Кг, К3, перемещая- соответствующие датчики на моделирующем планшете 26. Поворачивают одновременно полумуфты 18 и 19
1578455
на 180° и поочередно отсчитывают показания датчиков 16, 17 линейных перемещений. Результаты измерений.запоминаются на отсчетных компенсаторах 10, 11. По результатам проведенных измерений, поворачивая микровинт на планшете 26, перемещают соответствующий датчик на величину, равную разности в показаниях датчиков 16 и 17, и на отсчетных компенсаторах 24,
10
15
25 получают значения Х и Х2. Аналогично осуществляют центрирование в вертикальной плоскости. 1 з.п.ф-лы, 2 ил.
25 получают значения Х и Х2. Аналогично осуществляют центрирование в вертикальной плоскости. 1 з.п.ф-лы, 2 ил.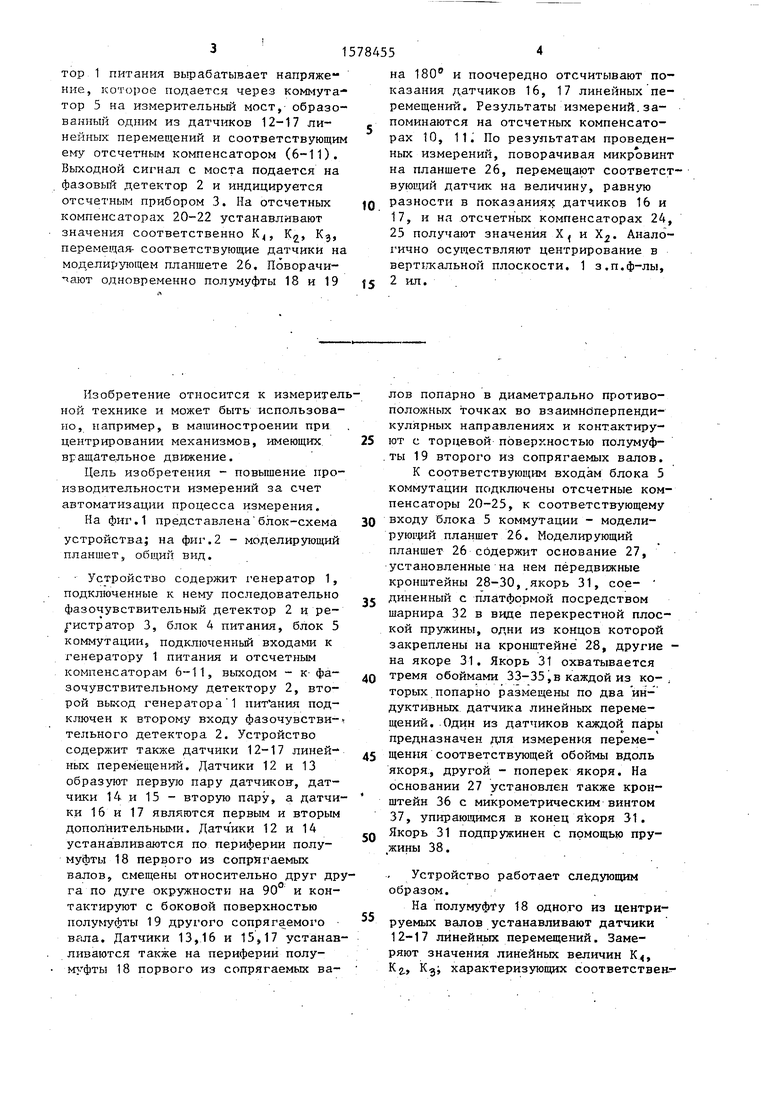
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для центрирования валов | 1986 |
|
SU1350474A1 |
| Устройство для автоматизированного контроля соосности и центровки механических конструкций | 2016 |
|
RU2639993C1 |
| Устройство для измерения несоосности валов | 1989 |
|
SU1793203A1 |
| Центрирующее устройство | 1983 |
|
SU1113666A1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1994 |
|
RU2090175C1 |
| Устройство для автоматической центрировки оптических компакт-дисков | 1989 |
|
SU1704159A1 |
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2167778C2 |
| Устройство для управления параллельным инвертором тока с выпрямительно-индуктивным компенсатором | 1991 |
|
SU1781804A1 |
| Способ определения координат инженерных металлических коммуникаций и устройство для его осуществления | 1986 |
|
SU1318957A1 |
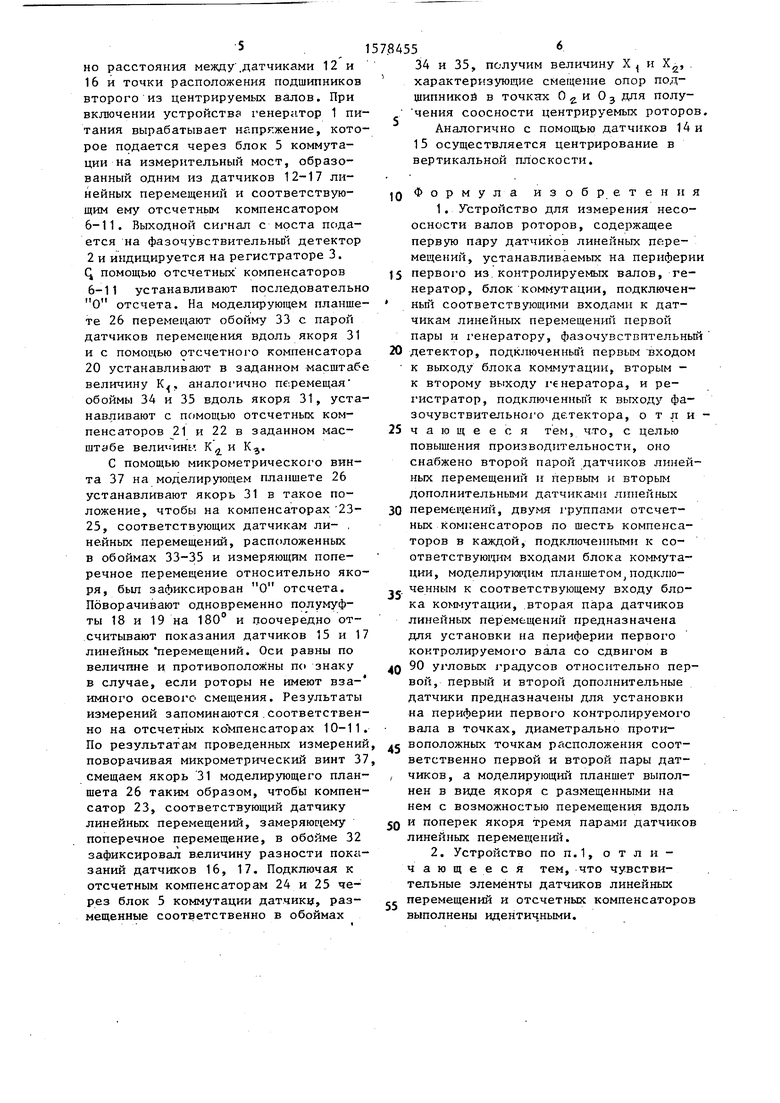
Изобретение относится к измерительной технике и может использоваться, например, в машиностроении при центрировании механизмов, имеющих вращательное движение. Целью изобретения является повышение производительности измерений. На полумуфту 18 одного из центрируемых валов устанавливают датчики 12-17 линейных перемещений. Замеряют значения K 1, K 3, K 3. При включении устройства генератор 1 питания вырабатывает напряжение, которое подается через коммутатор 5 на измерительный мост, образованный одним из датчиков 12-17 линейных перемещений и соответствующим ему отсчетным компенсатором (6-11). Выходный сигнал с моста подается на фазовый детектор 2 и индицируется отсчетным прибором 3. На отсчетных компенсаторах 20-22 устанавливают значения соответственно K 1, K 2, K 3, перемещая соответствующие датчики на моделирующем планшете 26. Поворачивают одновременно полумуфты 18 и 19 на 180° и поочередно отсчитывают показания датчиков 16, 17 линейных перемещений. Результаты измерений запоминаются на отсчетных компенсаторах 10, 11. По результатам проведенных измерений, поворачивая микровинт на планшете 26, перемещают соответствующий датчик на величину, равную разности в показаниях датчиков 16 и 17, и на отсчетных компенсаторах 24, 25 получают значения X 1 и X 2. Аналогично осуществляют центрирование в вертикальной плоскости. 1 з.п.ф-лы, 2 ил.
Изобретение относится к измерителной технике и может быть использовано, например, в машиностроении при центрировании механизмов, имеющих вращательное движение.
Цель изобретения - повышение производительности измерений за счет автоматизации процесса измерения.
На фиг.1 представлена блок-схема
устройства; на фиг.2 - моделирующий планшетs общий вид.
Устройство содержит генератор 1, подключенные к нему последовательно фазочувствительный детектор 2 и регистратор 3, блок 4 питания, блок 5 коммутации, подключенный входами к генератору 1 питания и отсчетным компенсаторам 6-11, выходом - к фа- зочувствительному детектору 2, второй выход генератора 1 пит ания подключен к второму входу фазочувстви-. тельного детектора 2. Устройство содержит также датчики 12-17 линейных перемещений. Датчики 12 и 13 образуют первую пару датчиков-, датчики 14 и 15 - вторую пару, а датчики 16 и 17 являются первым и вторым дополнительными. Датчики 12 и 14 устанавливаются по периферии полумуфты 18 первого из сопрягаемых валов, смещены относительно друг друга по дуге окружности на 90 и контактируют с боковой поверхностью полумуфты 19 другого сопрягаемого вала. Датчики 13,16 и 15,17 устанавливаются также на периферии полу- муфты 18 первого из сопрягаемых ва5
0
5
0
5
0
5
лов попарно в диаметрально противоположных точках во взаимно перпенди- кулярных направлениях и контактируют с торцевой поверхностью полумуфты 19 второго из сопрягаемых валов. К соответствующим входам блока 5 коммутации подключены отсчетные компенсаторы 20-25, к соответствующему входу блока 5 коммутации - моделирующий планшет 26. Моделирующий планшет 26 содержит основание 27, установленные на нем передвижные кронштейны 28-30, якорь 31, сое- диненный с платформой посредством шарнира 32 в виде перекрестной плоской пружины, одни из концов которой закреплены на кронштейне 28, другие - на якоре 31. Якорь 31 охватывается тремя обоймами 33-35, в каждой из ко-. торых попарно размещены по два индуктивных датчика линейных перемещений. Один из датчиков каждой пары предназначен для измерения перемещения соответствующей обоймы вдоль якоря, другой - поперек якоря. На основании 27 установлен также кронштейн 36 с микрометрическим винтом 37, упирающимся в конец якоря 31. Якорь 31 подпружинен с помощью пру- .жины 38.
Устройство работает следующим образом.
На полумуфту 18 одного из центрируемых валов устанавливают датчики 12-17 линейных перемещений. Замеряют значения линейных величин К«, КЈ, характеризующих соответствен.но расстояния между .датчиками 12 и 16 и точки расположения подшипников второго из центрируемых валов. При включении устройства генератор 1 питания вырабатывает нг.пргжение, которое подается через блок 5 коммутации на измерительный мост, образованный одним из датчиков 12-17 линейных перемещений и соответствующим ему отсчетным компенсатором 6-11. Выходной сигнал с моста подается на фазочувствительный детектор
2 и индицируется на регистраторе 3. Q помощью отсчетных компенсаторов
6-11 устанавливают последовательно О отсчета. На моделирующем планшете 26 перемещают обойму 33 с парой датчиков перемещения вдоль якоря 31 и с помощью отсчетного компенсатора 20 устанавливают в заданном масштабе величину К, аналогично перемещая обоймы ЗА и 35 вдоль якоря 31, устанавливают с помощью отсчетных компенсаторов J21 и 22 в заданном масштабе величин . К 4 и К.
С помощью микрометрического винта 37 на моделирующем планшете 26 устанавливают якорь 31 в такое положение, чтобы на компенсаторах 23- 25, соответствующих датчикам линейных перемещений, расположенных в обоймах 33-35 и измеряющим поперечное перемещение относительно якоря, был зафиксирован О отсчета. Поворачивают одновременно полумуфты 18 и 19 на 180° и поочередно отсчитывают показания датчиков 15 и 17 линейных перемещений. Оси равны по величине и противоположны по знаку в случае, если роторы не имеют вза- имного осевого смещения. Результаты измерений запоминаются соответственно на отсчетных ко мпенсаторах 10-11.
По результатам проведенных измерений, с воположных точкам расположения соот- поворачивая микрометрический винт 37, смещаем якорь 31 моделирующего планшета 26 таким образом, чтобы компенсатор 23, соответствующий датчику линейных перемещений, замеряющему поперечное перемещение, в обойме 32 зафиксировал величину разности показаний датчиков 16, 17. Подключая к отсчетным компенсаторам 24 и 25 через блок 5 коммутации датчики, размещенные соответственно в обоймах
ветственно первой и второй пары дат- , чиков, а моделирующий планшет выполнен в виде якоря с размещенными на нем с возможностью перемещения вдоль 5о и поперек якоря тремя парами датчиков линейных перемещений.
55
выполнены идентичными.
0
34 и 35, получим величину X и Х2, характеризующие смещение опор подшипников в точкях 0 Ј и О 3 для получения соосности центрируемых роторов. Аналогично с помощью датчиков 14 и 15 осуществляется центрирование в вертикальной плоскости.
Формула изобретения 1. Устройство для измерения несоосности валов роторов, содержащее первую пару датчиков линейных перемещений, устанавливаемых на периферии
5 первого из контролируемых валов, генератор, блок коммутации, подключенный соответствующими входами к датчикам линейных перемещений первой пары и генератору, фазочувствптельный
0 детектор, подключенный первым входом к выходу блока коммутации, вторым - к второму выходу генератора, и регистратор, подключенный к выходу фа- зочувствительного детектора, о т л и 5 чающееся тем, что, с целью повышения производительности, оно снабжено второй парой датчиков линейных перемещений и первым и вторым дополнительными датчиками линейных
0 перемещений, двумя группами отсчетных компенсаторов по шесть компенсаторов в каждой, подключенными к соответствующим входами блока коммутации, моделирующим планшетом,подклю ченным к соответствующему входу блока коммутации, вторая пара датчиков линейных перемещений предназначена для установки на периферии первого контролируемого вала со сдвигом в
0 90 угловых градусов относительно первой, первый и второй дополнительные датчики предназначены для установки на периферии первого контролируемого вала в точках, диаметрально противоположных точкам расположения соот-
ветственно первой и второй пары дат- чиков, а моделирующий планшет выполнен в виде якоря с размещенными на нем с возможностью перемещения вдоль и поперек якоря тремя парами датчиков линейных перемещений.
выполнены идентичными.
28 32
27 33 31 29 J4
/ / / / /
Фиг.2
,30 35 J7J6
| Милютин А.В | |||
| Центровка турбин и других вращающихся объектов тепло вых электростанций | |||
| - М.: Энергия, 1968,,с.18-38 | |||
| Устройство для центровки валов | 1978 |
|
SU718697A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
