| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления нереверсивным вентильным электроприводом постоянного тока | 1988 |
|
SU1663729A2 |
| Электропривод постоянного тока | 1988 |
|
SU1686680A1 |
| Способ двухзонного регулирования частоты вращения электропривода | 1988 |
|
SU1656651A1 |
| Способ пуска асинхронного электродвигателя и устройство для его осуществления | 1990 |
|
SU1774453A1 |
| Электропривод постоянного тока | 1988 |
|
SU1515313A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| Электропривод | 1980 |
|
SU989722A1 |
| Асинхронный электропривод с экстремальным управлением | 1983 |
|
SU1117812A2 |
| СПОСОБ УПРАВЛЕНИЯ ВЗАИМОСВЯЗАННЫМИ ЭЛЕКТРОПРИВОДАМИ (ВАРИАНТЫ) | 2006 |
|
RU2316886C1 |
| Электропривод | 1980 |
|
SU964948A1 |
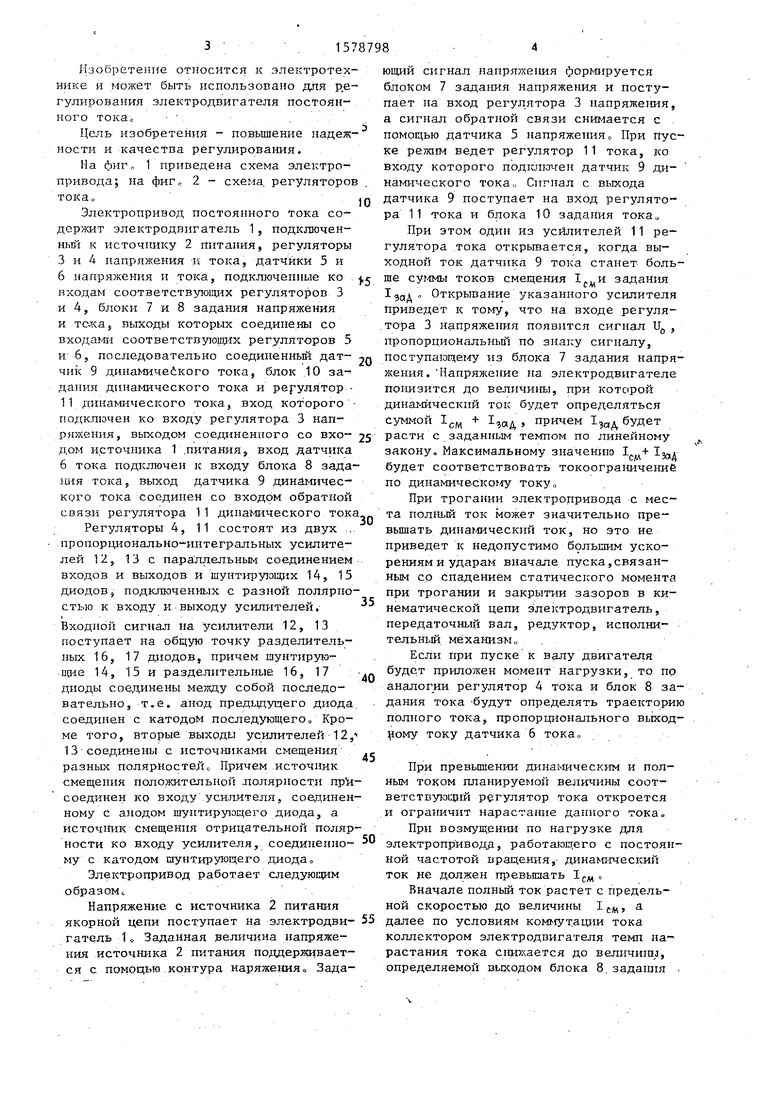
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью изобретения является повышение надежности и качества регулирования. Электропривод содержит регулятор 11 динамического тока, вход которого соединен с выходом блока 10 задания динамического тока и датчиком 9 динамического тока. Выход регулятора 11 соединен со входом регулятора 3 напряжения. В данном устройстве обеспечивается формирование заданной траектории изменения полного и динамического тока и поддержание при возмущении по нагрузке неизменного напряжения на коллекторе электродвигателя. 2 ил.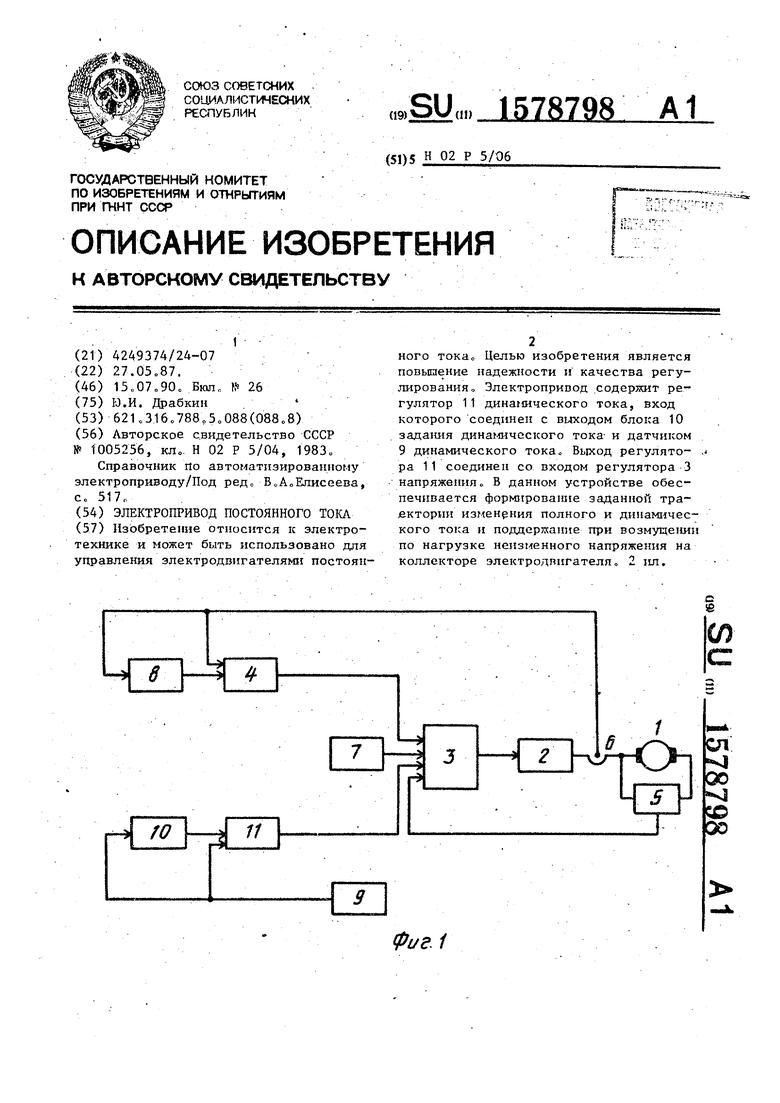
Фие 1
5
20
Изобретение относится к электротехнике и может быть использовано для р.е- гулирования электродвигателя постоянного тока с
Цель изобретения - повышение надеж-3 ности и качества регулирования.
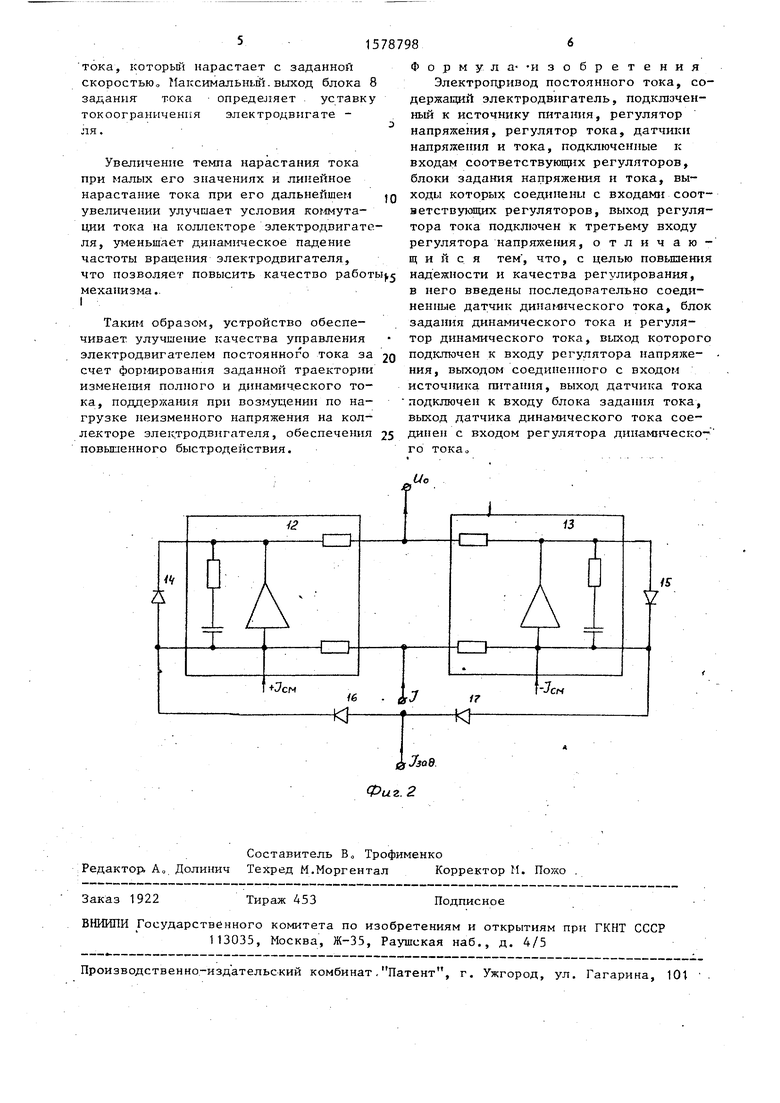
На фиг, 1 приведена схема электропривода; на фиг. 2 - схема регуляторов
Электропривод постоянного тока содержит электродвигатель 1, подключен- ный к источнику 2 питания, регуляторы 3 и 4 напряжения и тока, датчики 5 и 6 напряжения и тока, подключенные ко входам соответствующих регуляторов 3 и 4, блоки 7 и 8 задания напряжения и тска, выходы которых соединены со входами соответствующих регуляторов 5 и 6, последовательно соединенный датчик 9 динамического тока, блок 10 задания динамического тока и регулятор - 11 динамического тока, вход которого подключен ко входу регулятора 3 напряжения, выходом соединенного со вхо- 25 дом источника 1 питания, вход датчика 6 тока подключен к входу блока 8 задания гока, выход датчика 9 динамического тока соединен со входом обратной связи регулятора 11 динамического тока
Регуляторы 4, 11 состоят из двух пропорционально-интегральных усилителей 12, 13 с параллельным соединением входов и выходов и шунтирующих 14, 15 диодов, подключенных с разной полярностью к входу и выходу усилителей.
Входной сигнал на усилители 12, 13 поступает на общую точку разделительных 16, 17 диодов, причем шунтирующие 14, 15 и разделительные 16, 17 диоды соединены между собой последовательно, т.е. анод предыдущего Диода соединен с катодом последующего Кроме того, вторые выходы усилителей 12, 13 соединены с источниками смещения разных полярностей с Причем источник смещения положительной лолярности пр1и- соединеи ко входу усилителя, соединенному с анодом шунтирующего диода, а источник смещения отрицательной полярности ко входу усилителя, соединенно- 50 му с катодом шунтирующего диода
Электропривод работает следующим образом
Напряжение с источника 2 питания
30
35
40
45
ющий сигнал напряжения формируется блоком 7 задания напряжения и поступает на вход регулятора 3 напряжения, а сигнал обратной связи снимается с помощью датчика 5 напряжения„ При пуске режим ведет регулятор 11 тока, ко входу которого подключен датчик 9 динамического тока, Сигнал с выхода датчика 9 поступает на вход регулятора 11 тока и блока 10 задания токад
При этом один из усилителей 11 регулятора тока открывается, когда выходной ток датчика 9 тока станет больше суммы токов смещения 1сми задания Открывание указанного усилителя приведет к тому, что на входе регулятора 3 напряжения появится сигнал U0, пропорциональный по знаку сигналу, поступающему из блока 7 задания напряжения. Напряжение на электродвигателе понизится до величины, при которой динамический ток будет определяться суммой 1СМ + 1гад , причем 1заД будет расти с заданным темпом по линейному закону. Максимальному значению I + будет соответствовать токоограничение по динамическому току„
При трогании электропривода с места полный ток может значительно превышать динамический ток, но это не приведет к недопустимо большим ускорениям и ударам вначале пуска,связанным со спадением статического момента при трогании и закрытии зазоров в кинематической цепи электродвигатель, передаточный вал, редуктор, исполнительный механизм„
Если при пуске к валу двигателя будет приложен момент нагрузки, то по аналогии регулятор 4 тока и блок 8 задания тока будут определять траекторию полного тока, пропорционального выходному току датчика 6 тока
При превышении динамическим и полным током планируемой величины соответствующий регулятор тока откроется и ограничит нарастание данного тока
При возмущении по нагрузке для электропривода, работающего с постоянной частотой вращения, динамический ток не должен превышать 1СМ „
Вначале полный ток растет с предельной скоростью до величины 1
ем
якорной цепи поступает на электродви- 55далее по условиям коммутации тока
гатель 1„ Заданная величина напряже-коллектором электродвигателя темп нания источника 2 питания поддерживает-растания тока снижается до величины,
ся с помощью контура наряжения,, Зада-определяемой выходом блока 8 задают
5
0
3
Q
5
50
30
35
40
45
ющий сигнал напряжения формируется блоком 7 задания напряжения и поступает на вход регулятора 3 напряжения, а сигнал обратной связи снимается с помощью датчика 5 напряжения„ При пуске режим ведет регулятор 11 тока, ко входу которого подключен датчик 9 динамического тока, Сигнал с выхода датчика 9 поступает на вход регулятора 11 тока и блока 10 задания токад
При этом один из усилителей 11 регулятора тока открывается, когда выходной ток датчика 9 тока станет больше суммы токов смещения 1сми задания Открывание указанного усилителя приведет к тому, что на входе регулятора 3 напряжения появится сигнал U0, пропорциональный по знаку сигналу, поступающему из блока 7 задания напряжения. Напряжение на электродвигателе понизится до величины, при которой динамический ток будет определяться суммой 1СМ + 1гад , причем 1заД будет расти с заданным темпом по линейному закону. Максимальному значению I + будет соответствовать токоограничение по динамическому току„
При трогании электропривода с места полный ток может значительно превышать динамический ток, но это не приведет к недопустимо большим ускорениям и ударам вначале пуска,связанным со спадением статического момента при трогании и закрытии зазоров в кинематической цепи электродвигатель, передаточный вал, редуктор, исполнительный механизм„
Если при пуске к валу двигателя будет приложен момент нагрузки, то по аналогии регулятор 4 тока и блок 8 задания тока будут определять траекторию полного тока, пропорционального выходному току датчика 6 тока
При превышении динамическим и полным током планируемой величины соответствующий регулятор тока откроется и ограничит нарастание данного тока
При возмущении по нагрузке для электропривода, работающего с постоянной частотой вращения, динамический ток не должен превышать 1СМ „
Вначале полный ток растет с предельной скоростью до величины 1
ем
тока, который нарастает с заданной скоростью Максимальный выход блока 8 задания тока определяет уставку токоограниченпя электродвигате - ля.
Увеличение темпа нарастания тока при малых его значениях и линейное нарастание тока при его дальнейшем увеличении улучшает условия коммутации тока на коллекторе электродвигателя, уменьшает динамическое падение частоты вращения электродвигателя,
что позволяет повысить качество работы надежности и качества регулирования,
механизма. I
Таким образом, устройство обеспечивает улучшение качества управления электродвигателем постоянного тока за счет формирования заданной траектории изменения полного и динамического тока, поддержания при возмущении по нагрузке неизменного напряжения на коллекторе электродвигателя, обеспечения повышенного быстродействия.
12
-СИ
н
Л
-Ш}
+J,
см
г
Составитель В0 Трофименко Редактор, А„ Долинич Техред М.Моргентал Корректор М. Пожо
Заказ 1922
Тираж 453
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Формула -изобретения
Электропривод постоянного тока, содержащий электродвигатель, подключенный к источнику питания, регулятор напряжения, регулятор тока, датчики напряжения и тока, подключенные к входам соответствующих регуляторов, блоки задания напряжения и тока, выходы которых соединены с входами соответствующих регуляторов, выход регулятора тока подключен к третьему входу регулятора напряжения, отличающийся тем , что, с целью повышения
в него введены последовательно соединенные датчик динамического тока, блок задания динамического тока и регулятор динамического тока, выход которого
подключен к входу регулятора напряжения, выходом соединенного с входом источника питания, выход датчика тока подключен к входу блока задания тока, выход датчика динамического тока соединен с входом регулятора динамического тока о
CHJ13
V
is
{Ц
17
-J,
сн
KJФиг 2
Подписное
| Электропривод постоянного тока | 1981 |
|
SU1005256A1 |
| Справочник По автоматизированному электроприводу/Под ред Б„АоЕлисеева, с | |||
| МАШИНА ДЛЯ НАКЛЕИВАНИЯ ЭТИКЕТОВ НА БУТЫЛКИ | 1925 |
|
SU517A1 |
