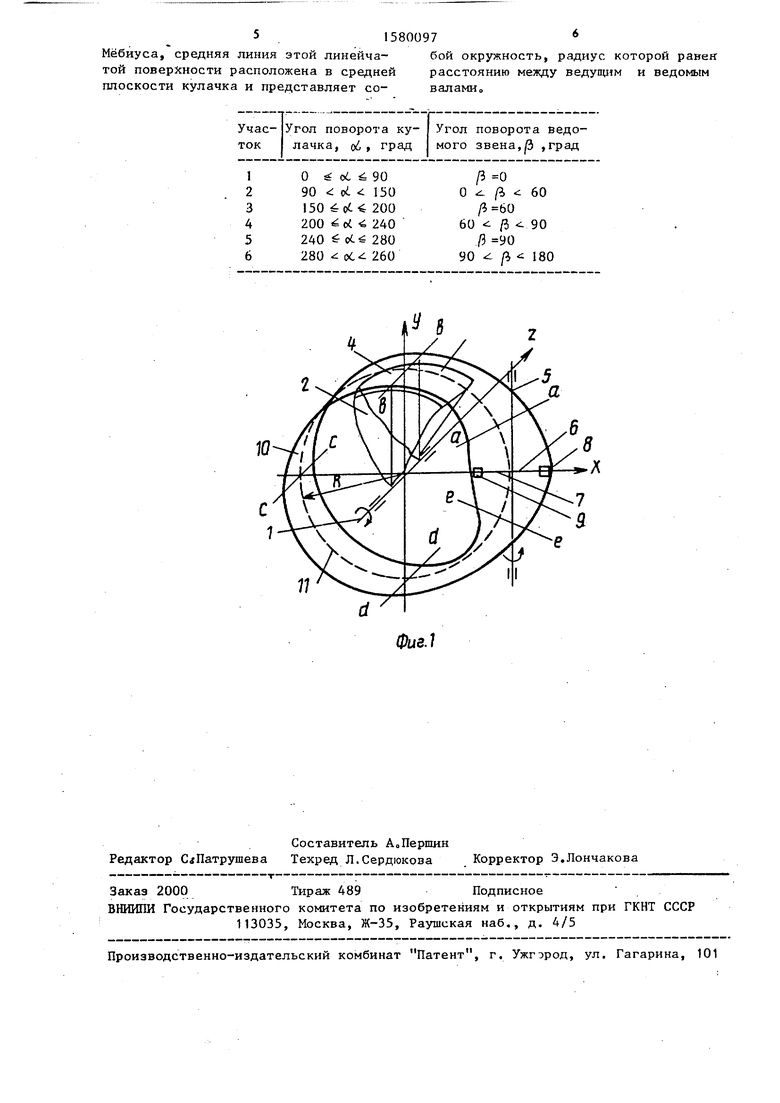
Фиг. 2
Изобретение относится к машиностроению и касается механизмов прерывистого вращения и фиксации ведомого звена, в частности кулачковых механиз- нов.
Цель изобретения - повышение надежности путем уменьшения упругих деформаций и повышение точности характеристик движения ведомого звена JQ
На фиг,1 изображена схема кулачкового механизма с центровым (теоретическим) профилем кулачка; на фиг02 - кулачковый механизм, вариант„
При вращении ведущего вала 1 установленный на нем пространственный кулачок 2 взаимодействует рабочим профилем 3 с двумя роликами 8 и 9 и передает движение на ведомый вал 5 При этом ролики 8 и 9 переходят с одной ветви рабочего профиля 3 на его другую ветвь (фиго2). Движение ведомого вала 5 прекращается, когда ролики 8 и 9 катятся по фиксирующей поверхности 40 За один оборот кулачка ведомый вал 5 поворачивается на 180 „ Кулачковый механизм позволяет получить 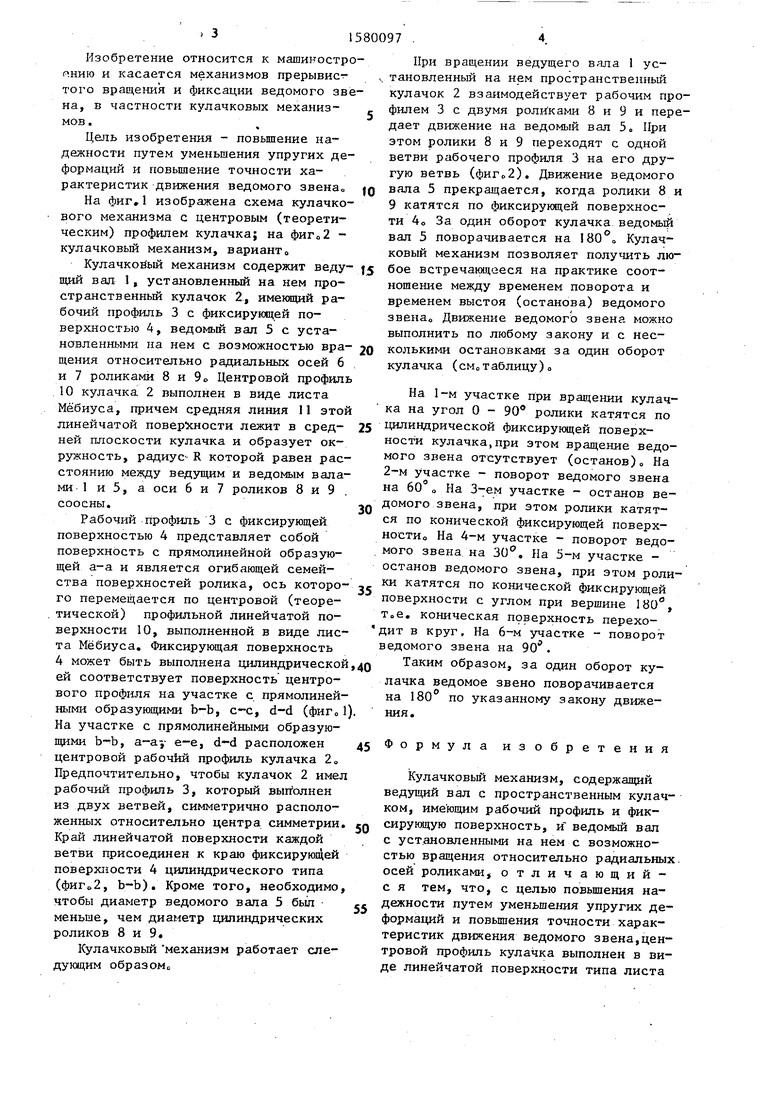
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотное устройство | 1983 |
|
SU1128032A2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ДВИЖЕНИЯ ВЕДОМОГО ЗВЕНА КУЛАЧКОВОГО МЕХАНИЗМА | 1990 |
|
RU2020334C1 |
| Поворотно-делительный стол | 1990 |
|
SU1773685A1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1995 |
|
RU2091637C1 |
| Устройство для поворота ведомого звена | 1978 |
|
SU771388A1 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР НЕФРИКЦИОННОГО ТИПА | 2016 |
|
RU2622178C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Способ регулирования впрыска топлива в дизель и устройство для его осуществления (его варианты) | 1986 |
|
SU1512228A1 |
Изобретение относится к машиностроению и касается механизмов прерывистого вращения и фиксации ведомого звена. Цель изобретения - повышение надежности путем уменьшения упругих деформаций и повышение точности характеристик движения ведомого звена. В кулачковом механизме центровой профиль кулачка 2 выполнен в виде линейчатой поверхности типа листа Мебиуса. Средняя линия этой линейчатой поверхности лежит в средней плоскости кулачка 2 и образует окружность, радиус которой равен расстоянию между ведущим 1 и ведомым 5 валами. Оси роликов 8, 9 соосны. 2 ил., 1 табл.
Кулачкойый механизм содержит веду- бое встречающееся на практике соотношение между временем поворота и временем выстоя (останова) ведомого звена0 Движение ведомого звена можно выполнить по любому закону и с нес- 20 колькими остановками за один оборот кулачка (см„таблицу)о
щий вал 1, установленный на нем пространственный кулачок 2, имеющий рабочий профиль 3 с фиксирующей поверхностью 4, ведомый вал 5 с установленными на нем с возможностью вращения относительно радиальных осей 6 и 7 роликами 8 и 90 Центровой профиль 10 кулачка 2 выполнен в виде листа Мёбиуса, причем средняя линия 11 этой линейчатой поверхности лежит в средней плоскости кулачка и образует окружность, радиус- R которой равен расстоянию между ведущим и ведомым валами 1 и 5, а оси 6 и 7 роликов 8 и 9 . соосны.
Рабочий профиль 3 с фиксирующей поверхностью 4 представляет собой поверхность с прямолинейной образующей а-а и является огибающей семей-
25
30
На 1-м участке при вращении кулачка на угол 0 - 90° ролики катятся по цилиндрической фиксирующей поверхности кулачка,при этом вращение ведомого звена отсутствует (останов)0 На 2-м участке - поворот ведомого звена на 60 о На 3-ем участке - останов ведомого звена, при этом ролики катятся по конической фиксирующей поверхностно На 4-м участке - поворот ведомого звена на 30°. На 5-м участке - останов ведомого звена, при этом роли
ства поверхностей ролика, ось которо- с кк катятся по конической фиксирующей
го перемещается по центровой (теоретической) профильной линейчатой поверхности 10, выполненной в виде листа Мебиуса. Фиксирующая поверхность
поверхности с углом при вершине 180С; т„е. коническая поверхность переходит в круг, На 6-м участке - поворот ведомого звена на 90.
4 может быть выполнена цилиндрической,40 Таким образом, за один оборот куеи соответствует поверхность центрового профиля на участке с прямолинейными образующими b-b, с-с, d-d (фиг01 На участке с прямолинейными образующими b-b, a-a-t- , d-d расположен центровой рабочий профиль кулачка 2а Предпочтительно, чтобы кулачок 2 имел рабочий профиль 3, который выпЪлнен из двух ветвей, симметрично расположенных относительно центра симметрии. Край линейчатой поверхности каждой ветви присоединен к краю фиксирующей поверхности 4 цилиндрического типа (фиг02, b-b). Кроме того, необходимо, чтобы диаметр ведомого вала 5 был меньше, чем диаметр цилиндрических роликов 8 и 9.
Кулачковый механизм работает следующим образомо
На 1-м участке при вращении кулачка на угол 0 - 90° ролики катятся по цилиндрической фиксирующей поверхности кулачка,при этом вращение ведомого звена отсутствует (останов)0 На 2-м участке - поворот ведомого звена на 60 о На 3-ем участке - останов ведомого звена, при этом ролики катятся по конической фиксирующей поверхностно На 4-м участке - поворот ведомого звена на 30°. На 5-м участке - останов ведомого звена, при этом ролиповерхности с углом при вершине 180С; т„е. коническая поверхность переходит в круг, На 6-м участке - поворот ведомого звена на 90.
лачка ведомое звено поворачивается
на 180°
ния.
по указанному закону движе-
45 Формула изобретения
Кулачковый механизм, содержащий ведущий вал с пространственным кулач
ком, имеющим рабочий профиль и фиксирующую поверхность, и ведомый вал с установленными на нем с возможностью вращения относительно радиальных осей роликами, отличающий- с я тем, что, с целью повышения надежности путем уменьшения упругих деформаций и повышения точности характеристик движения ведомого звена,центровой профиль кулачка выполнен в виде линейчатой поверхности типа листа
515800976
Мёбиуса, средняя линия этой линейча- бой окружность, радиус которой ранея той поверхности расположена в средней расстоянию между ведущим и ведомым плоскости кулачка и представляет со- валами.
11
/
а
| Кулачковый механизм | 1978 |
|
SU905551A1 |
