Изобретение относится к управлению, электрическими машинами и может использоваться в дискретном электроприводе .
Цель изобретения - повышение КПД.
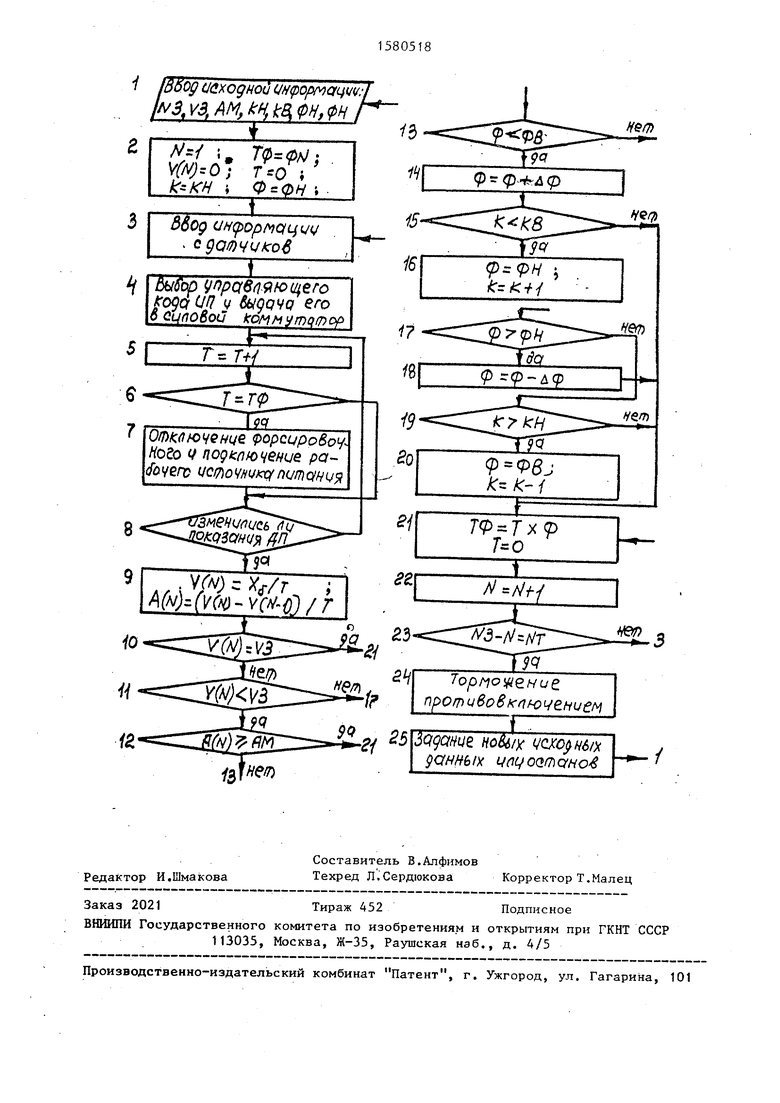
На чертеже приведен пример реализации способа с использованием микропроцессорных устройств управления (в виде блок-схемы программы управления) .
Способ реализуется следующим образом.
После запуска программы осуществляется ввод в диалоговом режиме через интерфейс ввода-вывода следующей исходной информации (блок 1): величина перемещения (N3), заданная скорость установившегося движения (V3), максимально допустимое ускорение (AM), начальный вид коммутации (КН), верхняя граница допустимого изменения вида коммутации (KB), нижняя граница длительности форсировки (ФН), верхняя граница допустимого изменения
длительности форсировки (ФВ). Такой набор вводимых в диалоговом режиме исходных данных позволяет максимально сократить время переналадки электропривода на базе шагового двигателя (ИЩ) на новые координаты работы ШД и существенно расширить диапазон их регулирования. В блоке 2 производят подготовительные операции для работы программы: устанавливается начальное значение текущего шага (N 1), задается начальная длительность форсировки и вид коммутации (ТФ ФН, К КН), устанавливается нулевое зна- .чение скорости и времени движения на текущем шаге (V(N) 0, Т 0). В блоке 3-производится ввод информа.ции в центральный процессор через устройство параллельно дискретного ввода с датчиков положения (ДП). На основании этой информации, а также исходя из значения К и ТФ в блоке 4 центральный процессор определяет код управления и выдает его на силовой
(Л
ел оо
СП
(аюй.
ОО
коммутатор, подключая к форсировоч- ному питанию соответствующие фазы ШД. Блок 5 представляет собой программный счетчик времени движения на шаге. В блоке 6 центральный процессор (ЦП) проверяет окончание участка форсировки.и, если участок форси- ровки окончен, то в блоке 7 отключает форсировочное питание и выдает управляющий код на силовой коммутатор для подключения рабочего питания. В блоке 8 ЦП сравнивает текущие показания ДП с показаниями, зафиксированными перед началом текущего шага. При равенстве этих показаний продолжается работа программного счетчика времени движения на текущем шаге, в противном случае (шаг завершен) в блоке 9 ЦП производит расчет средней скорости на завершенном шаге (V(N) и ускорения (A(N) по следующим формулам
VOO |5,
Xfr
величина базового шага ШД, определяется конструкцией двигателя,
А(ю .
В блоках 10 и 11 ЦП сравнивает значения средней скорости на шаге (V(N)) и заданной V3, если они равны, то осуществляется переход в счетчик прой денных шагов. Если ЦП производит корректировку управляющих воздействий в сторону уменьшения, а при V3 V(N) в сторону увеличения, корректировка в сторону увеличения не производит- ся, если A(N) AM (проверка осуществляется в блоке 12),
При корректировке управляющих воздействий центральным процессором в блоке 13 проверяется возможность увеличения длительности форсировки Ф, где Ф - длительность форсировки в нормированном виде Т:
А Тф Ф --.
Т
0
с 0
5
0
з0
45
50
Если Ф меньше заданного максимального значения, длительность форсировки увеличивается на единичный шаг (блок 14), в противном случае ЦП проверяет возможность корректировки координат ШД изменением вида коммутации (блок 15). Если вид коммутации меньше заданного ограничения (К КБ), то ЦП увеличивает номер вида коммутации на единицу, устанавливая при этом Ф ФН (блок 16) .
В блоках 17-20 ЦП производят аналогичную корректировку управляющих воздействий в сторону уменьшения контролируемых координат ШД, при этом в качестве ограничителей используются соответственно КН и ФН.
В блоке 21 ЦП производит подготовку к новому шагу движения.
В блоке 22 ЦП выполняет программный счет пройденных шагов.
В блоке 23 ЦП осуществляет проверку на начало участка торможения.
Если торможение не началось, то ЦП осуществляет переход в блок 3, в противном случае в блоке 24 ЦП осуществляет режим торможения известными способами противовключения и переходит в режим ожидания нового задания.
Использование при изменении частоты в процессе разгона различных видов коммутации с плавным изменением длительности форсировки в пределах одного вида коммутации позволяет обеспечить оптимальный для данной частоты режим включения, что и приводит к повышению КПД. Формула изобретения
Способ управления разгоном многофазного шагового двигателя, включающий переключение режимов коммутации фаз и подачу импульсов форсировки при включении каждой фазы, отличающийся тем, что, с целью повышения КПД, в промежутках между переключениями режимов коммутации увеличивают длительность импульсов форсировки при возрастании частоты, а при переключениях уменьшают длительность этих импульсов.
1 j&dog исходной информации:
М КЗ AM, Щ Щ фН, рН Г аг
/Ј-/ ;, 70 0Л/,- V00SO; ГсО
лг-Аг// « 0A/1
I
ввод UHpopMQLjw - (ro
/Мер управляющего кода УП v его о Суповой Крммугпдфор
W
чч
Опмюченце рорсцрово Hoto if подьпючение pa- cfeye/т цсяочнцкуптпсмця
е/т
9Н j + i
9 V8j к-к-1
Изобретение относится к электротехнике и может быть использовано в дискретном электроприводе. Цель изобретения состоит в повышении КПД. Способ управления обеспечивает дискретное изменение вида коммутации и плавное изменение длительности форсировки при изменении частоты тактовых импульсов. 1 ил.
. Vf/y) с Хг/г , Ь(ммУ№-У&-ф / Г
jgfW)
S.
7Ф
X т.
Торноуение
ПрОГПцво8К(1Н ЧЈНЦЈМ
л
д
зщаме новб/х цсхорнбм данных чщоъъуноЗ
| Устройство для управления многофазным шаговым двигателем | 1985 |
|
SU1309250A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления @ -фазным шаговым двигателем | 1984 |
|
SU1279043A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
