10
31582323
Изобретение относится к электротехнике и может быть использовано при создании электроприводов малой и средней мощности различного назначения.
Целью изобретения является увеличение диапазона регулирования частоты вращения и повышение энергетических показателей.
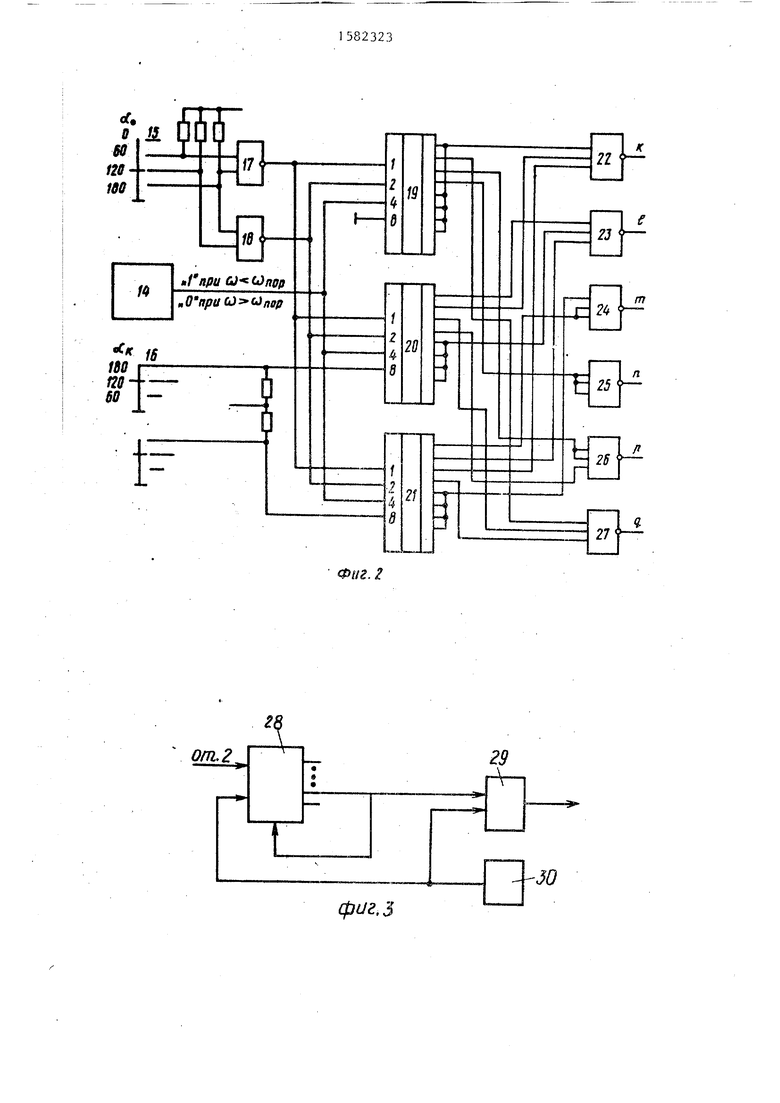
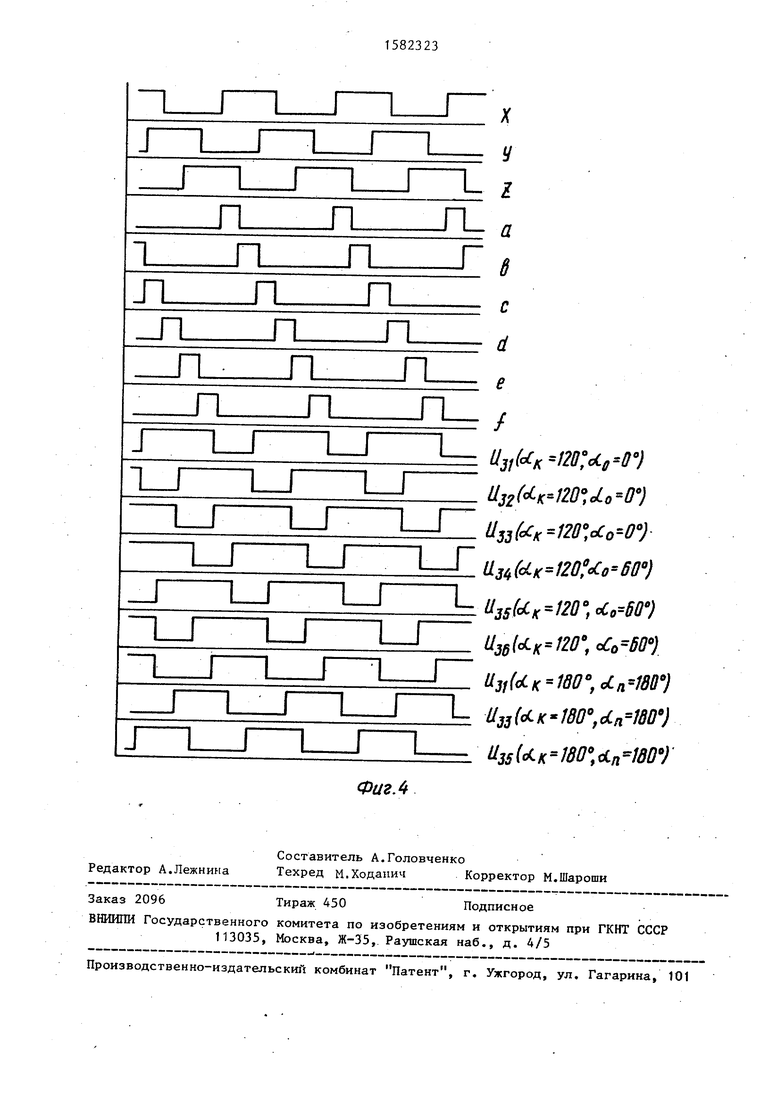
На фиг. 1 представлена блок-схема I бесконтактного двигателя постоянного тока} на фиг. 2 - блок-схема командного бдока; на фиг. 3 - блок-схема блока частоты вращения; на °фиг. 4 - диаграммы, поясняющие работу двигателя.
Бесконтактный двигатель постоянного тока содержит синхронную машину 1 с m-фазной якорной обмоткой 2. На валу ротора синхронной машины установлен многоканальный датчик 3 положения ротора. Выводы якорной обмотки 2 подключены к коммутатору 4. Выходы многоканального датчика 3 положения ротора синхронной машины подключены тс входам формирователя 5 кода положения, составленного из трех инверторов 6 и трехвходовых шести логических элементов ИЛИ 7. Входы
15
20
25
12 управления режимом и задатчика 13 угла пуска. Входы блока 12 образуют входы командного блока 11, которые подключены соответственно к выходам блока 14 частоты вращения, задатчика 15 угла коммутации и задатчика 16 угла опережения. Вход блока 14 частоты вращения соединен с одним из вы ходов датчика положения ротора.
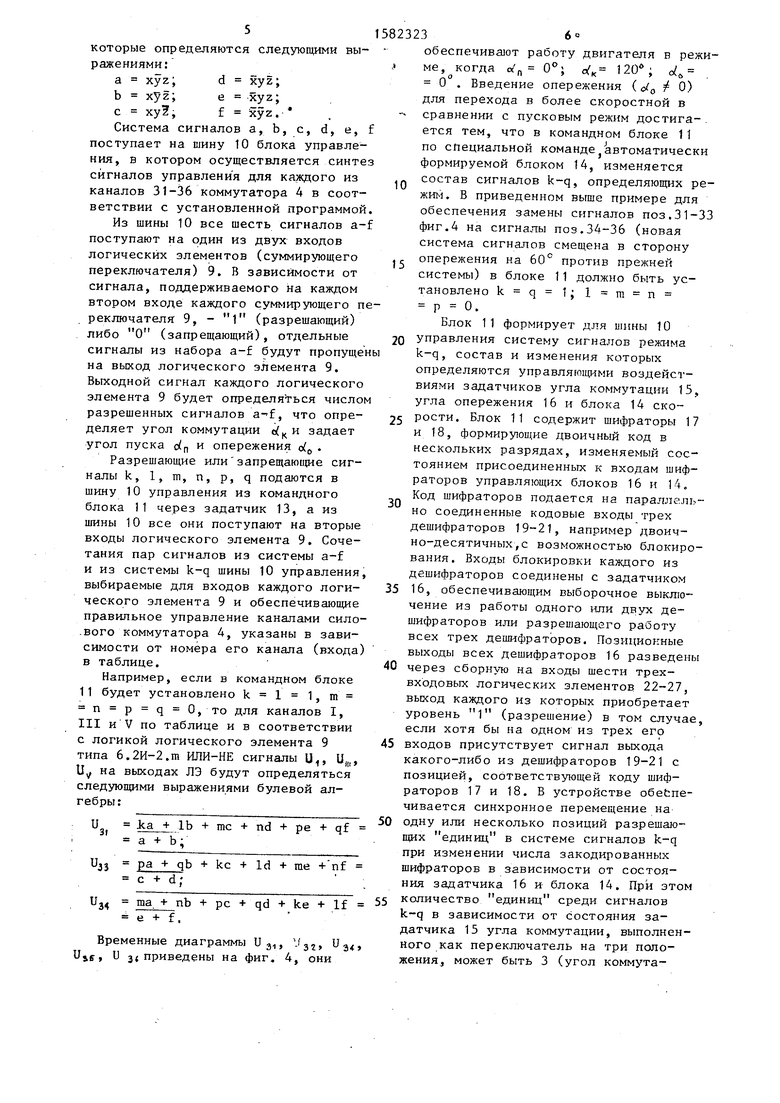
Блок 12 управления режимом может быть составлен из двух шифраторов 17 и 18, трех дешифраторов 19-21 и шести трехвходовых логических элементов ИЛИ-НЕ 22-27, на выходах которых формируются команды в виде кодов k, I, m, п, р, q, поступающие на второй 2т-канальный вход блока управ ления. При этом входы шифраторов 17 и 18 образуют вход для задания углов коммутации. Объединенные первые вход дешифраторов 19-21 соединены с выходом шифраторов 17, объединенные вторые входы дешифраторов 19-21 подключены к выходу шифратора 18, объединенные третьи входы дешифраторов 19- 21 образуют вход для задания частоты вращения, а объединенные четвертые входы дешифраторов 20 и 21 - вход дл задания угла опережения. Выходы де35
40
логических элементов входной шестипроводной шиной, при этом провода входной шины попарно объединены через инверторы 6 соответственно, образуя три входа формирователя 5 кода положения, а выходы логических элементов ИЛИ 7 образуют 2 канальных выхода формирователя кода положения, на которых формируются логические сигналы а, Ь, с, d, e f кода положения. Указанные выходы формирователя 5 подключены к 2т-ка- нальным входам блока 8 управления, многоканальный выход которого соединен с многоканальным управляющим входом коммутатора 8.
Блок 8 управления представляет собой логический сумматор и составлен из шести дв енадцативходовых логических элементов 9, которые могут быть выполнены по типу логических элементов 6.2И-2.Ш ИЛИ-НЕ или 6.2И-2.т ИЛИ. Входы указанных логических элементов объединены шиной 10, образующей 2га-канальный основной вход и 2т-канальный дополнительный
ИЛИ 7 объединены30 шифраторов соединены соответственно
50
55
с входами логических элементов ИЛИ-НЕ 22-27.
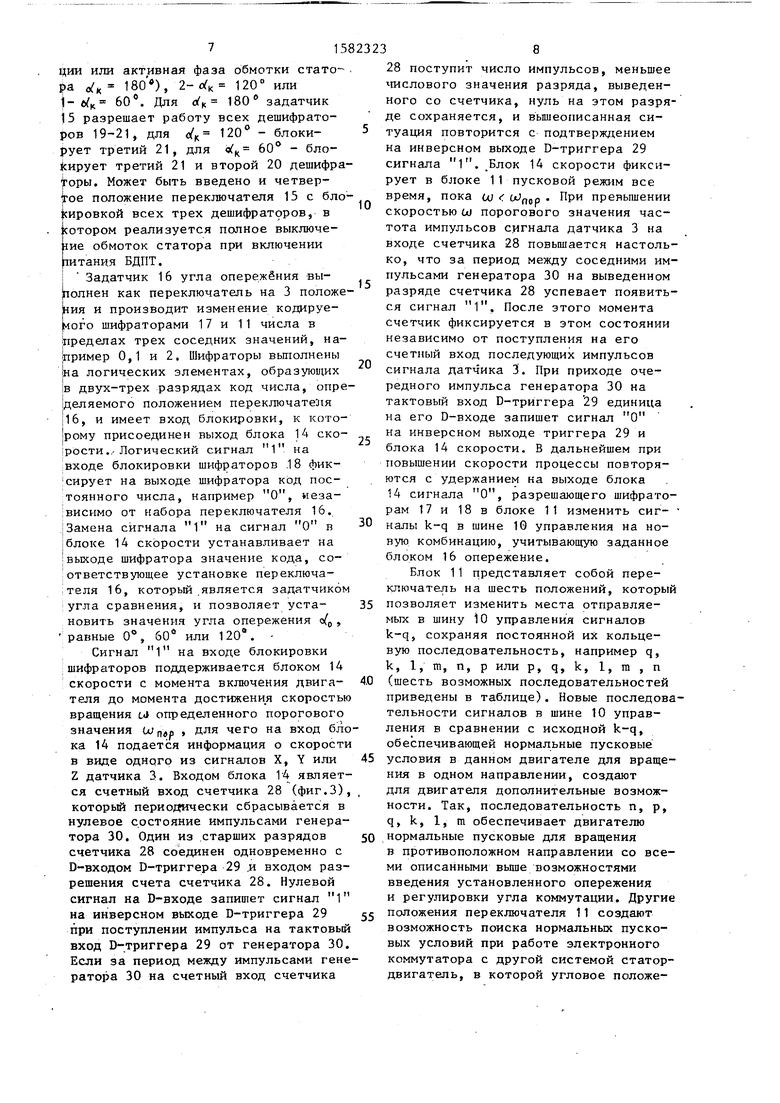
Блок 14 частоты вращения может быть составлен из счетчика 28, счетный вход которого образует вход блока 14, D-триггера 29, D-вход которого соединен с выходом старшего раз ряда счетчика 28, который соединен с входом разрешения счета счетчика 28. Вход сброса счетчика 28 и тактовый вход В-триГ|Гера подключены к выходу генератора 30. Выход D-триггера образует выход блока 14 частоты вращения.
Бесконтактный двигатель постоянно го тока работает следующим образом.
На выходе датчика 3 положения ротора формируются три импульсные последовательности прямоугольных CHI- налов х, у, z (меандр) со скважностью , сдвинутых по фазе на 120°.
После инвертирования этих сигнало в инверторах 6 формируются сигналы х, у, z (фиг.4). Указанные сигналы х У z х. У. z подаются соответственно на входы логических элементов 7, на выходах которых формируются коды положения в виде импульсных последовательностей а, Ь, f, с, d, e, f
вход, соединенный с 2га-канальным выходом командного блока 11.
Командный блок 11 составлен из последовательно соединенных блока
0
5
0
5
12 управления режимом и задатчика 13 угла пуска. Входы блока 12 образуют входы командного блока 11, которые подключены соответственно к выходам блока 14 частоты вращения, задатчика 15 угла коммутации и задатчика 16 угла опережения. Вход блока 14 частоты вращения соединен с одним из выходов датчика положения ротора.
Блок 12 управления режимом может быть составлен из двух шифраторов 17 и 18, трех дешифраторов 19-21 и шести трехвходовых логических элементов ИЛИ-НЕ 22-27, на выходах которых формируются команды в виде кодов k, I, m, п, р, q, поступающие на второй 2т-канальный вход блока управления. При этом входы шифраторов 17 и 18 образуют вход для задания углов коммутации. Объединенные первые входы дешифраторов 19-21 соединены с выходом шифраторов 17, объединенные вторые входы дешифраторов 19-21 подключены к выходу шифратора 18, объединенные третьи входы дешифраторов 19- 21 образуют вход для задания частоты вращения, а объединенные четвертые входы дешифраторов 20 и 21 - вход для задания угла опережения. Выходы де0 шифраторов соединены соответственно
5
0
0
5
с входами логических элементов ИЛИ-НЕ 22-27.
Блок 14 частоты вращения может быть составлен из счетчика 28, счетный вход которого образует вход блока 14, D-триггера 29, D-вход которого соединен с выходом старшего разряда счетчика 28, который соединен с входом разрешения счета счетчика 28. Вход сброса счетчика 28 и тактовый вход В-триГ|Гера подключены к выходу генератора 30. Выход D-триггера образует выход блока 14 частоты вращения.
Бесконтактный двигатель постоянного тока работает следующим образом.
На выходе датчика 3 положения ротора формируются три импульсные последовательности прямоугольных CHI- налов х, у, z (меандр) со скважностью , сдвинутых по фазе на 120°.
После инвертирования этих сигналов в инверторах 6 формируются сигналы х, у, z (фиг.4). Указанные сигналы х У z х. У. z подаются соответственно на входы логических элементов 7, на выходах которых формируются коды положения в виде импульсных последовательностей а, Ь, f, с, d, e, f,
которые определяются следующими вы- ражениями:
а xyz; d xyz;
b xyz; e xyz;
с хуЗ, f xyz.
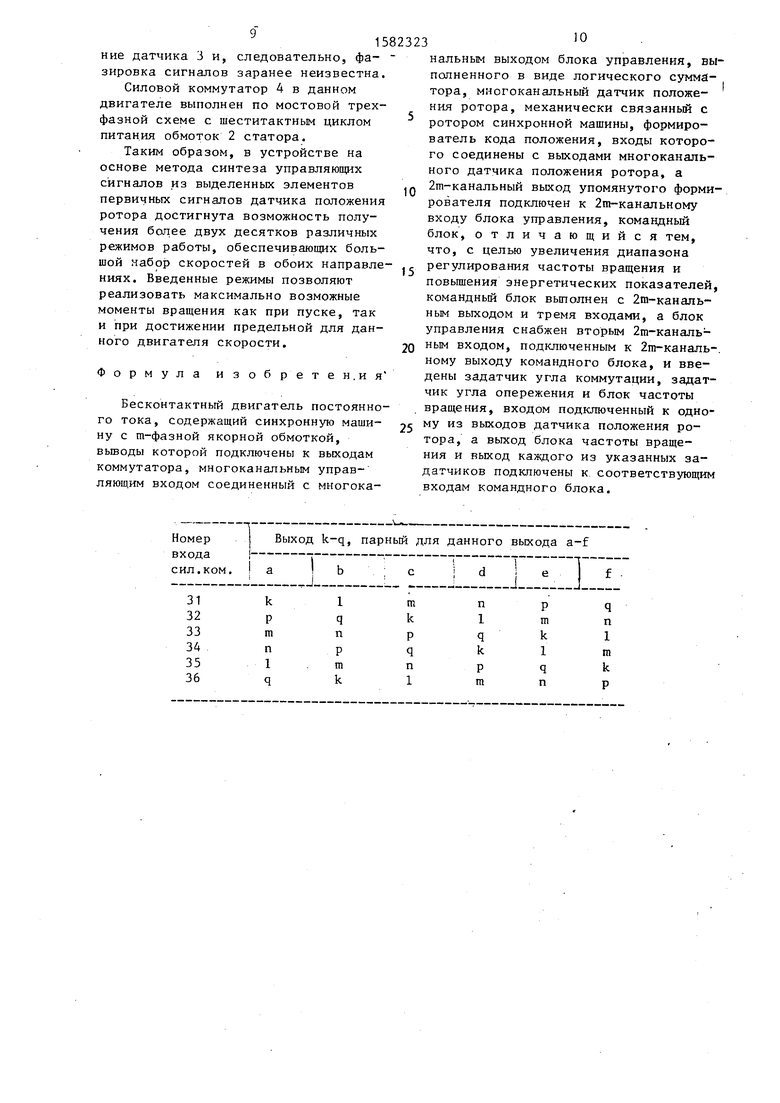
Система сигналов a, b, c, d, e, f поступает на шину 10 блока управления, в котором осуществляется синтез сигналов управления для каждого из каналов 31-36 коммутатора 4 в соответствии с установленной программой.
Из шины 10 все шесть сигналов a-f поступают на один из двух входов логических элементов (суммирующего переключателя) 9. В зависимости от сигнала, поддерживаемого на каждом втором входе каждого суммирующего переключателя 9, - 1 (разрешающий) либо О (запрещающий), отдельные сигналы из набора a-f будут пропущен на выход логического элемента 9. Выходной сигнал каждого логического элемента 9 будет определяться числом разрешенных сигналов a-f, что определяет угол коммутации с(к и задает угол пуска dn и опережения сЈ0 .
Разрешающие или запрещающие сигналы k, I, m, п, р, q подаются в шину 10 управления из командного блока 11 через задатчик 13, а из шины 10 все они поступают на вторые входы логического элемента 9. Сочетания пар сигналов из системы a-f и из системы k-q шины 10 управления, выбираемые для входов каждого логического элемента 9 и обеспечивающие правильное управление каналами силового коммутатора 4, указаны в зависимости от номера его канала (входа) в таблице.
Например, если в командном блоке
I1будет установлено k 1 1, m , то для каналов I,
IIIи V по таблице и в соответствии с логикой логического элемента 9 типа 6.2И-2.т ИЛИ-НЕ сигналы Ц,,, Ц,„, 11 на выходах ЛЭ будут определяться следующими выражениями булевой алгебры:
U
31
U
33
и
34
Временные диаграммы U Э1,
-32
ас U з приведены на фиг. 4, они
ы
10
15
20
25
30
35
40
45
50
55
обеспечивают работу двигателя в режиме, когда « „ 0°; а(к 1 20й ; й 0 . Введение опережения (/0 Ф 0) для перехода в более скоростной в сравнении с пусковым режим достигается тем, что в командном блоке 11 по специальной команде}автоматически формируемой блоком 14, изменяется состав сигналов k-q, определяющих режим. В приведенном выше примере для обеспечения замены сигналов поз.31-33 фиг.4 на сигналы поз.34-36 (новая система сигналов смещена в сторону опережения на 60° против прежней системы) в блоке 11 должно быть установлено Р 0.
Блок 11 формирует для шины 10 управления систему сигналов режима k-q, состав и изменения которых определяются управляющими воздействиями задатчиков угла коммутации 15, угла опережения 16 и блока 14 скорости. Блок 11 содержит шифраторы 17 и 18, формирующие двоичный код в нескольких разрядах, изменяемый состоянием присоединенных к входам шифраторов управляющих блоков 16 и 17+„ Код шифраторов подается на параллельно соединенные кодовые входы трех дешифраторов 19-21, например двоично-десятичных, с возможностью блокирования. Входы блокировки каждого из дешифраторов соединены с задатчиком 16, обеспечивающим выборочное выключение из работы одного или двух дешифраторов или разрешающего работу всех трех дешифраторов. Позиционные выходы всех дешифраторов 16 разведены через сборную на входы шести трех- входовых логических элементов 22-27, выход каждого из которых приобретает уровень 1 (разрешение) в том случае, если хотя бы на одном из трех его входов присутствует сигнал выхода какого-либо из дешифраторов 19-21 с позицией, соответствующей коду шифраторов 17 и 18. В устройстве обеспечивается синхронное перемещение на одну или несколько позиций разрешающих единиц в системе сигналов k-q при изменении числа закодированных шифраторов в зависимости от состояния задатчика 16 и блока 14. При этом количество единиц среди сигналов k-q в зависимости от состояния задатчика 15 угла коммутации, выполненного как переключатель на три положения, может быть 3 (угол коммута
ции или активная фаза обмотки статора 180), 2-rfK 120° или 1- tfK 60°. Для V 180° задатчик 15 разрешает работу всех дешифраторов 19-21, для 120° - блокирует третий 21, для tfK 60° - блокирует третий 21 и второй 20 дешифраторы. Может быть введено и четвертое положение переключателя 15 с блокировкой всех трех дешифраторов, в котором реализуется полное выключе- ше обмоток статора при включении питания БДПТ.
Задатчик 16 угла опережения вы- |полнен как переключатель на 3 положения и производит изменение кодируе- Иого шифраторами 17 и 11 числа в пределах трех соседних значений, например 0,1 и 2. Шифраторы выполнены «а логических элементах, образующих в двух-трех разрядах код числа, определяемого положением переключателя 16, и имеет вход блокировки, к кою- рому присоединен выход блока 14 ско- рости. Логический сигнал 1 на входе блокировки шифраторов 18 фиксирует на выходе шифратора код постоянного числа, например О, независимо от набора переключателя 16. Замена сигнала 1 на сигнал О в блоке 14 скорости устанавливает на выходе шифратора значение кода, соответствующее установке переключателя 16, который является задатчиком угла сравнения, и позволяет установить значения угла опережения с/„ , равные 0°, 60й или 120°.
Сигнал 1 на входе блокировки шифраторов поддерживается блоком 14 скорости с момента включения двигателя до момента достижения скоростью вращения с« определенного порогового значения ыntp , для чего на вход блока 14 подается информация о скорости в виде одного из сигналов X, Y или Z датчика 3. Входом блока 14 является счетный вход счетчика 28 (фиг.З), который периодически сбрасывается в нулевое состояние импульсами генератора 30. Один из старших разрядов счетчика 28 соединен одновременно с D-входом D-триггера 29 и входом разрешения счета счетчика 28. Нулевой сигнал на D-входе запишет сигнал 1 на инверсном выходе D-триггера 29 при поступлении импульса на тактовый вход D-триггера 29 от генератора 30. Если за период между импульсами генератора 30 на счетный вход счетчика
5
0
5
5 0 5
0
5
0
28 поступит число импульсов, меньшее числового значения разряда, выведенного со счетчика, нуль на этом разряде сохраняется, и вышеописанная ситуация повторится с подтверждением на инверсном выходе D-триггера 29 сигнала 1..Блок 14 скорости фиксирует в блоке 11 пусковой режим все время, пока uj r oJnop . При превышении скоростью ы порогового значения частота импульсов сигнала датчика 3 на входе счетчика 28 повышается настолько, что за период между соседними импульсами генератора 30 на выведенном разряде счетчика 28 успевает появиться сигнал 1. После этого момента счетчик фиксируется в этом состоянии независимо от поступления на его счетный вход последующих импульсов сигнала датчика 3. При приходе очередного импульса генератора 30 на тактовый вход D-триггера 29 единица на его D-входе запишет сигнал О на инверсном выходе триггера 29 и блока 14 скорости. В дальнейшем при повышении скорости процессы повторяются с удержанием на выходе блока 14 сигнала О, разрешающего шифраторам 17 и 18 в блоке 11 изменить сигналы k-q в шине 10 управления на новую комбинацию, учитывающую заданное блоком 16 опережение.
Блок 11 представляет собой переключатель на шесть положений, который позволяет изменить места отправляемых в шину 10 управления сигналов k-q, сохраняя постоянной их кольцевую последовательность, например q, k, I, m, n, p или p, q, k, 1, m , n (шесть возможных последовательностей приведены в таблице). Новые последовательности сигналов в шине 10 управления в сравнении с исходной k-q, обеспечивающей нормальные пусковые условия в данном двигателе для вращения в одном направлении, создают для двигателя дополнительные возможности. Так, последовательность п, р, q, k, I, m обеспечивает двигателю нормальные пусковые для вращения в противоположном направлении со всеми описанными выше возможностями введения установленного опережения и регулировки угла коммутации. Другие положения переключателя 11 создают возможность поиска нормальных пусковых условий при работе электронного коммутатора с другой системой статор- двигатель, в которой угловое положеJ15
ние датчика 3 и, следовательно, фа- зировка сигналов заранее неизвестна.
Силовой коммутатор 4 в данном двигателе выполнен по мостовой трехфазной схеме с шеститактным циклом питания обмоток 2 статора.
Таким образом, в устройстве на основе метода синтеза управляющих сигналов из выделенных элементов первичных сигналов датчика положения ротора достигнута возможность получения более двух десятков различных режимов работы, обеспечивающих большой набор скоростей в обоих направле ниях. Введенные режимы позволяют реализовать максимально возможные моменты вращения как при пуске, так и при достижении предельной для данного двигателя скорости.
Формула изобретен,и я4
Бесконтактный двигатель постоянного тока, содержащий синхронную машину с m-фазной якорной обмоткой, выводы которой подключены к вькодам коммутатора, многоканальным управляющим входом соединенный с многока
,
0
0
5
10
нальным выходом блока управления, выполненного в виде логического сумматора, многоканальный датчик положения ротора, механически связанный с ротором синхронной машины, формирователь кода положения, входы которого соединены с выходами многоканального датчика положения ротора, а 2т-канальный выход упомянутого формирователя подключен к 2т-канальному входу блока управления, командный блок, отличающийся тем, что, с целью увеличения диапазона регулирования частоты вращения и повышения энергетических показателей, командный блок выполнен с 2т-каналь- ным выходом и тремя входами, а блок управления снабжен вторым 2т-каналь- ным входом, подключенным к 2т-каналь- ному выходу командного блока, и введены задатчик угла коммутации, задат- чик угла опережения и блок частоты вращения, входом подключенный к одному из выходов датчика положения ротора, а выход блока частоты вращения и выход каждого из указанных за- датчиков подключены к соответствующим входам командного блока.
Фиг. 2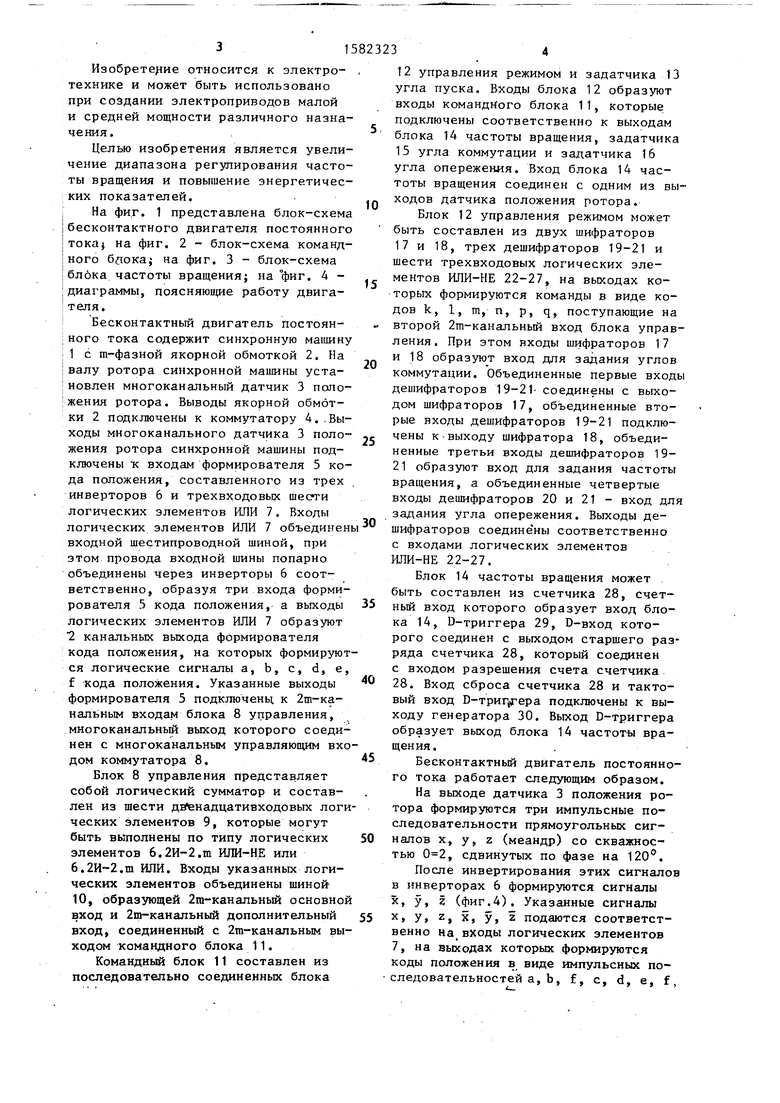
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Устройство для управления реверсивным @ -фазным шаговым электродвигателем | 1979 |
|
SU917295A1 |
| Устройство для диагностики дизеля | 1985 |
|
SU1270607A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543091C1 |
| Реверсивный распределитель импульсов для управления @ -фазным шаговым электродвигателем | 1988 |
|
SU1541755A1 |
| Устройство для определения направления вращения вентильного электродвигателя | 1984 |
|
SU1252901A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| Устройство для автоматического контроля графика операций | 1984 |
|
SU1295418A1 |
| Способ автоматического регулирования рабочего процесса дизеля и устройство для его осуществления | 1984 |
|
SU1213232A1 |
Изобретение относится к электротехнике. Целью изобретения является расширение диапазона регулирования частоты вращения и повышение энергетических показателей. С этой целью бесконтактный двигатель снабжен задатчиком 15 угля коммутации, задатчиком 16 угла опережения и блоком 14 скорости, выходы которых подключены ко входам командного блока 11. Выход командного блока 11 соединен с дополнительными входами блока 8 управления коммутатором 4 в цепи обмотки 2 якоря двигателя. В результате обеспечиваются различные режимы работы двигателя с максимальными моментами и в двух направлениях вращения. 1 табл, 4 ил.
om.2.
1
фиг, з
29
-30
| Патент ФРГ № 2901000, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления реверсивным бесконтактным электродвигателем постоянного тока | 1978 |
|
SU767908A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
