(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
t
Изобретение относится к электротехнике, а именно к автоматизированным электроприводам, и может быть использовано в устройствах автоматики , и телемеханики, вычислительной техники, станках с программным управлением.
По основному авт. св. 425275 известно устройство для управления |Q реверсивным бесконтактным электродвигателем постоянного тока, например шагового типа, содержащее три группы логических схем совпгщения, к одним входам которых подключены вы- ходы командного устройства, а к другим - чувствительные элементы датчика положения с различным сдвигом порядка включения этих элементов в каждой группе l.. 2Q
Недостатком известного устройства .является ограниченная возможность . изменения угла коммутации фаз электродвигателя, что снижает диапазон рабочих скоростей привода. 25
Цель изобретения - расширение диапазона рабочих скоростей привода.
Поставленная цель достигается тем, что устройство снабжено допол,нительными группами схем совпадения, ЗО
число которых на три меньше числа фаз электродвигателя, а командное устройство содержит такое же число дополнительных выходов режима работы, подключенных к первым входам соответствующих схем совпадения всех дополнительных групп, соединенных свои ми вторыми входами с чувствите.льными элементами датчика положения со сдвигом порядка включения в каждой группе.
Применение дополнительных групп схем совпадения со сдвигом порядка включения в каждой группе позволяет автоматически в процессе работы изменять угол коммутации фаз электродвигателя, регулируя тем самым его
скорость.I
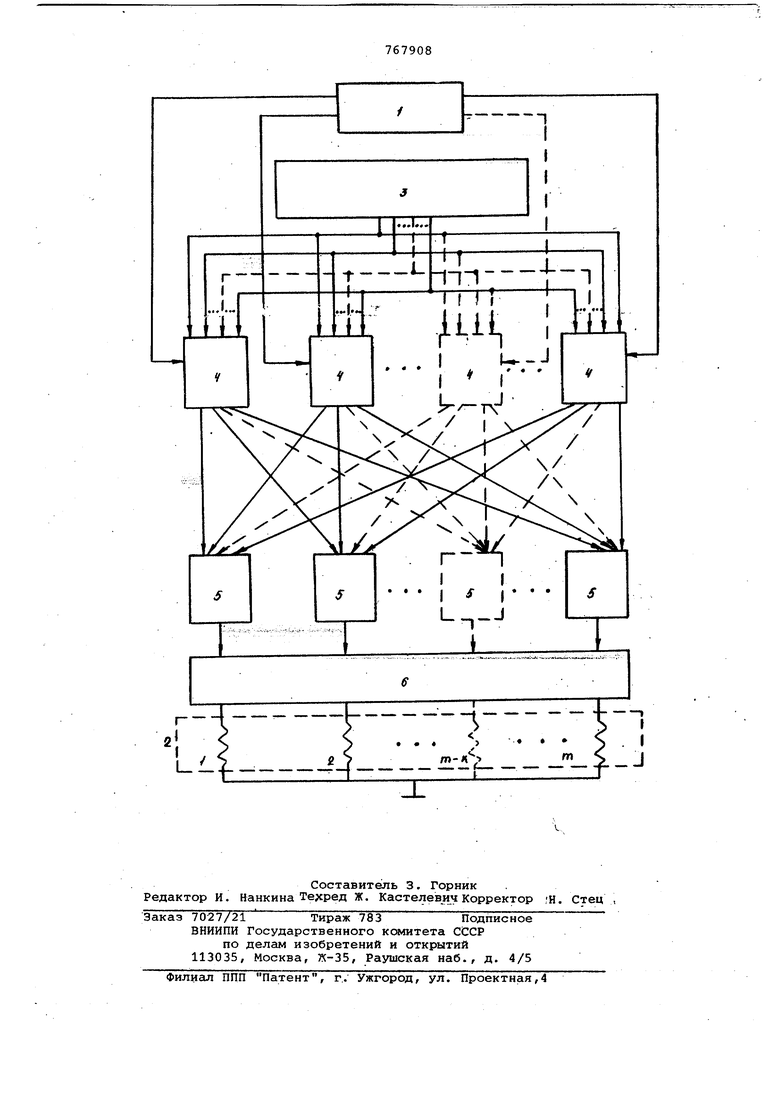
На чертеже приведена структурная,1 схема устройства для управления тфаэным электродвигателем.
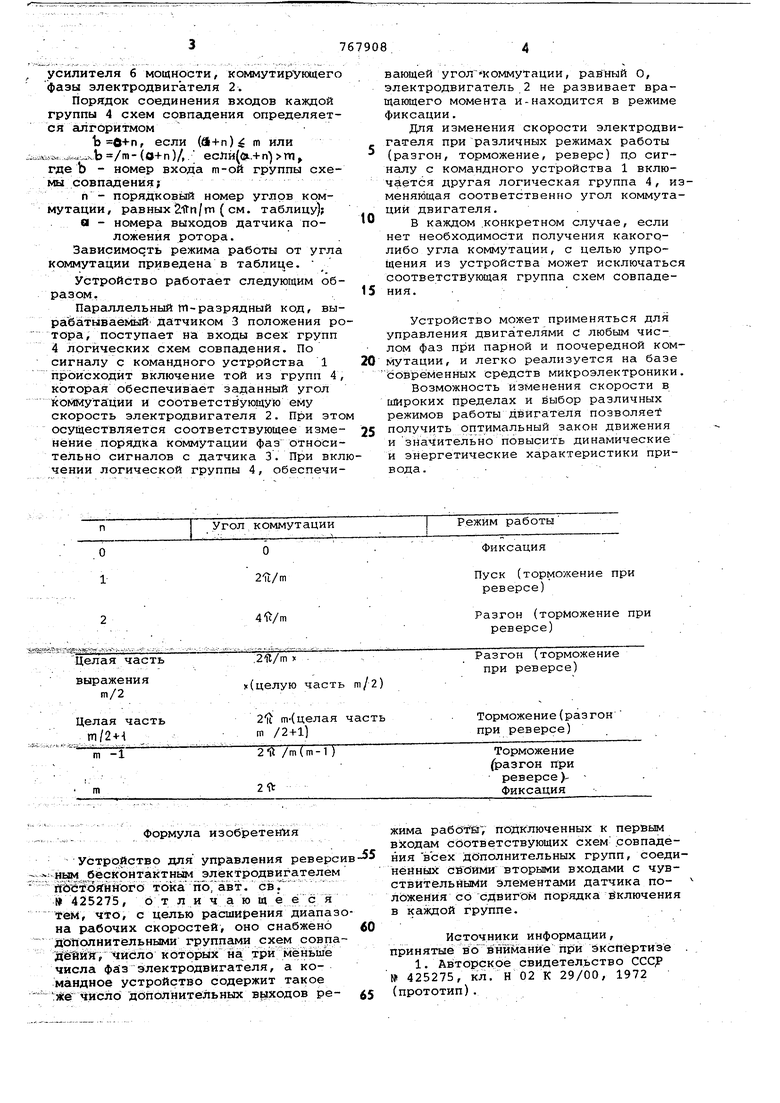
Устройстве) содержит командное устройство 1, изменяющее режим работы электродвигателя 2, т-фазный 3. положения ротора электродвигателя, m групп 4 логических схем совпадения и m групп логичес,ких элементов 5 ИЛИ, связывающих выходы каждой группы 4 со входами усилителя б мощности, коммутирующего фазы электродвигателя 2. Порядок соединения входов каждой группы 4 схем совпадения определяется алгоритмом , если (Л+п) т или :,Av «д„.Ь /т- (о+ п)/,. есЛй(э.+ п) m , где о - номер входа т-ой группы схемы совпадения; п - порядковый номер углов коммутации, paBHHx2ltn/Tn ( см. таблицу); а - номера выходов датчика положения ротора. Зависимость режима работы от угла коммутации приведена в таблиц е. Устройство работает следующим образом. Параллельный т-разрядный код, выраЪатываеМый датчиком 3 положения ро тора, поступает на входы всех групп 4 логических схем совпадения. По сигналу с командного устройства 1 происходит включение той из групп 4, которая обеспечивает заданный угол коьшутации и соответстБ(ующую ему скорость электродвигателя 2. При это осуществляется соответствующее изменение порядка коммутации фаз относительно сигналов с датчика 3. При вкл чении логической группы 4, обеспечивающей угол-коммутации, равный О, электродвигатель 2 не развивает вращающего момента и-находится в режиме фиксации. Для изменения скорости электродвигателя при различных режимах работы (разгон, торможение, реверс) п,о сигналу с командного устройства 1 включается другая логическая группа 4, изменяющая соответственно угол коммутаций двигателя. В каждом .конкретном случае, если нет необходимости получения какоголибо угла коммутации, с целью упрощения из устройства может исключаться соответствующая группа схем совпадения. Устройство может применяться для управления двигателями с любым числом фаз при парной и поочередной комМутации, и легко реализуется на базе Современных средств микроэлектроники. Возможность Изменения скорости в широких пределах и выбор различных режимов работы дёИгателя позволяет получить оптимальный закон движения и значительно повысить динамические и энергетические характеристики привода. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный двигатель | 1975 |
|
SU692013A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1007162A1 |
| Устройство для управления вентильным двигателем циклоконверторного типа (его варианты) | 1983 |
|
SU1137562A1 |
| Способ регулирования частоты вращения электродвигателя переменного тока | 1987 |
|
SU1471277A1 |
| Устройство для управления реверсивным вентильным электродвигателем | 1981 |
|
SU1001415A1 |
4u/n
. Формула изобретения
Устройство для управления реверсив-ньп 1 ббсйрнтактньвм электродвигателем йШ йягййогб тока , 425275, от ли ч а ю щ ё ё с я тем, что, с целью расширения диапазона рабочих скоростей, оно снабжено до119лнительными группами схем совпаШйШу гйсло кЬ 6рь1х на трименьше числа фаз электродвигателя, а командное устройство содержит такое «te число дополнительных выходов реРазгон (торможение при реверсе)
жима , подключенных к первым входам соответствующих схем совпадения всех дополнительных групп, соединённьк вторыми входами с чувствйтельньлми элементами датчика полОжения со сдвигом порядка выключения в каждой группе.
Источники информации, принятые вЪ внимание при экспертизе
