1
(21)4333216/25-08
(22)25.11.87
(46) 07.08.90. Бюл. № 29 (72) М.С. Резаев, Н.Г. Мороз/ Е.А. Бурдин и С.Б. Черевацкий
(53)62-229.72(088.8)
(56)Заявка Франции V 2275284, кл. В 25 J 15/00, 1976.
(54)СХВАТ МАНИПУЛЯТОРА
(57)Изобретение относится к машиностроению и применяется для антомати- зации и механизации технологических процессов во многих областях народного хозяйства (робототехнике, радиоэлектронике, химии, медицине и др.).
Цель - повышение эксплуатационных характеристик. Пальцы схвата манипулятора представляют собой закрепленные на основании гибкие, герметичные напорные оболочки из композиционного материала, эластичная основа которого армирована высокопробными волокнами, уложенными в виде спиралей, перекрещивающихся под углом к оси оболочки 55-86°. При этом в герметичной оболочке вдоль ее образующей между витками спиралей синтетических вопокон со стороны рабочей поверхности смонтирована гибкая полоса. 1 з.п.ф-лы. 4 ил.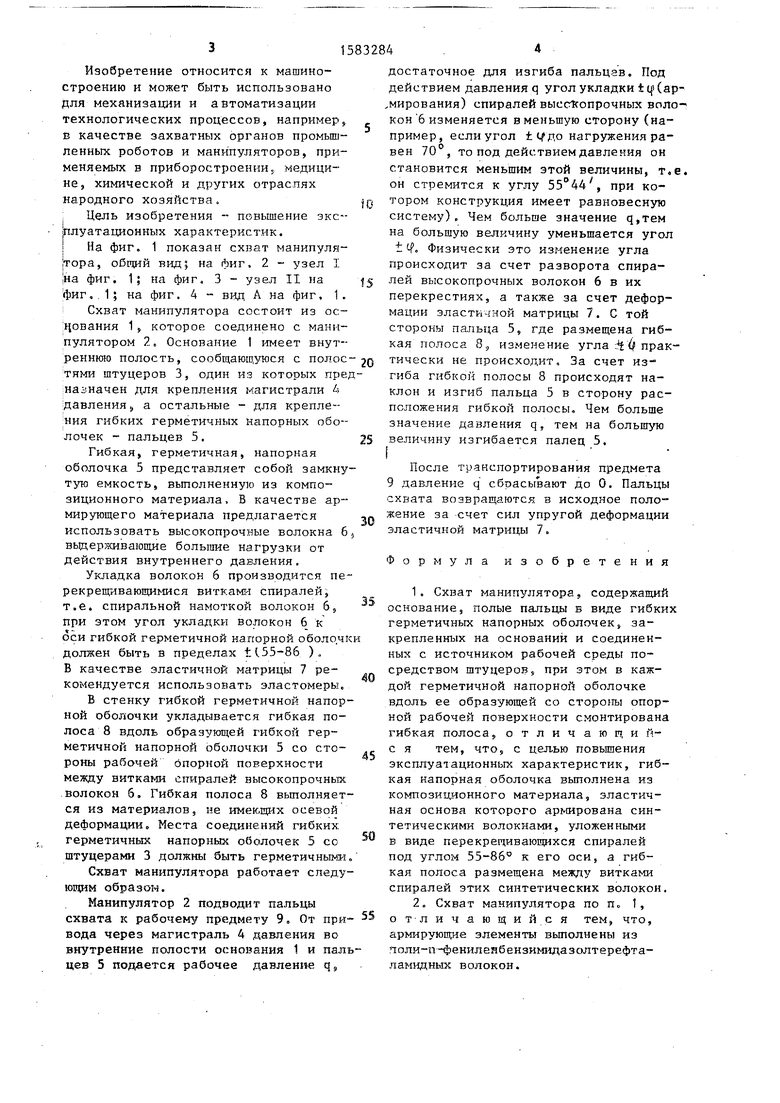
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1743843A1 |
| Манипулятор | 1987 |
|
SU1542798A1 |
| ЗАЩИТНАЯ ОБОЛОЧКА ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1993 |
|
RU2096678C1 |
| АРМИРОВАННАЯ ТРУБА-ОБОЛОЧКА ДЛЯ ВЫСОКОГО ДАВЛЕНИЯ | 1999 |
|
RU2156394C1 |
| ПАТРУБОК ГИБКИЙ ИЗ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ НА ОСНОВЕ ВУЛКАНИЗИРОВАННОЙ ПРОРЕЗИНЕННОЙ СТЕКЛОТКАНИ И ПОЛИМЕРНОГО ПОКРЫТИЯ | 2023 |
|
RU2808131C1 |
| Оболочка из композиционных материалов | 1989 |
|
SU1791657A1 |
| НЕСУЩАЯ ТРУБА-ОБОЛОЧКА В ВИДЕ ТЕЛА ВРАЩЕНИЯ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ (ВАРИАНТЫ) | 1996 |
|
RU2097197C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВЫСОКОПРОЧНЫХ ТРУБ-ОБОЛОЧЕК ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ (ВАРИАНТЫ) | 1996 |
|
RU2107622C1 |
| Резьбовая деталь | 1977 |
|
SU721579A1 |
| ПАТРУБОК ГИБКИЙ ИЗ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ НА ОСНОВЕ НЕВУЛКАНИЗИРОВАННОЙ ПРОРЕЗИНЕННОЙ СТЕКЛОТКАНИ | 2023 |
|
RU2817033C1 |

Изобретение относится к машиностроению и применяется для автоматизации и механизации технологических процессов во многих областях народного хозяйства (робототехнике, радиоэлектронике, химии, медицине и др.). Цель - повышение эксплуатационных характеристик. Пальцы схвата манипулятора представляют собой закрепленные на основании гибкие, герметичные напорные оболочки из композиционного материала, эластичная основа которого армирована высокопрочными волокнами, уложенными в виде спиралей, перекрещивающихся получения углом к оси оболочки 55-86°. При этом в герметичной оболочке вдоль ее образующей между витками спиралей синтетических волокон со стороны рабочей поверхности смонтирована гибкая полоса. 1 з.п.ф-лы, 4 ил.
СП
с:
Изобретение относится к машиностроению и может быть использовано для механизации и автоматизации технологических процессов, например, с качестве захватных органов промышленных роботов и манипуляторов, применяемых в приборостроении; медицине, химической и других отраспях народного хозяйства.
Цель изобретения - повышение эксплуатационных характеристик. 1 На фиг. 1 показан схват манипулятора, общий вид; на Лиг, 2 - узел на фиг. 1; на фиг, 3 - узел II на фиг, 1; на фиг. 4 - вид А на фиг, 1.
Схват манипулятора состоит из ос- цования 1, которое соединено с манипулятором . Основание 1 имеет внутреннюю полость, сообщаююуюся с полос тями штуцеров 3, один из которых преназначен для крепления магистрали 4 давления,, а остальные - для крепления гибких герметичных напорных оболочек - пальцев 5.
Гибкая, герметичная, напорная оболочка 5 представляет собой замкнутую емкость, выполненную из композиционного материала, В качестве армирующего материала предлагается использовать высокопрочные волокна 6 выдерживающие большие нагрузки от действия внутреннего давления.
Укладка волокон 6 производится перекрещивающимися витками спиралей, т.е. спиральной намоткой волокон 65 при этом угол укладки волокон 6 к оси гибкой герметичной напорной оболочк должен быть в пределах t (.55-86 ). В качестве эластичной матрицы 7 рекомендуется использовать эластомеры.
В стенку гибкой герметичной напорной оболочки укладывается гибкая полоса 8 вдоль образующей гибкой герметичной напорной оболочки 5 со стороны рабочей опорной поверхности между витками спиралей высокопрочньж волокон 6. Гибкая полоса 8 выполняется из материалов, не имеющих осевой деформации Места соединений гибких герметичных напорных оболочек 5 ее штуцерами 3 должны быть герметичными
Схват манипулятора работает следующим образом.
Манипулятор 2 подводит пальцы схвата к рабочему предмету 9. От при вода через магистраль 4 давления во внутренние полости основания 1 и палцев 5 подается рабочее давление q9
O
5
5
0
55 0
35
45
достаточное для изгиба пальцав. Под действием давления q угол укладки t qs (ap- ,мирования) спиралей высокопрочных воло- кон 6 изменяется в меньшую сторону (например, если угол нагружения равен 70°, то под действием давления ок становится меньшим этой величины, т.е. он стремится к углу 55°44 , при котором конструкция имеет равновесную систему). Чем больше значение q,TeM на большую величину уменьшается угол t tf. Физически это изменение угла происходит за счет разворота спиралей высокопрочных волокон 6 в их перекрестиях, а также за счет деформации эласти-г-юй матрицы 7. С той стороны пальца 5, где размещена гибкая полоса 0, изменение угла практически не происходит. За счет изгиба гибкой полосы 8 происходят наклон и изгиб пальца 5 в сторону расположения гибкой полосы. Чем больше значение давления q, тем на большую величину изгибается палец 5,
I
После транспортирования предмета
9 давление q сбрасывают до 0. Пальцы охвата возвращаются з исходное положение за счет сил упругой деформации эластичной матрицы 7.
Формула изобретения
2,Схват манипулятора по п„ 1, отличающийся тем, что, армирующие элементы выполнены из поли-п-фенилеябензимидазолтерефта- ламидных волокон.
Фиг 2
