S
(Л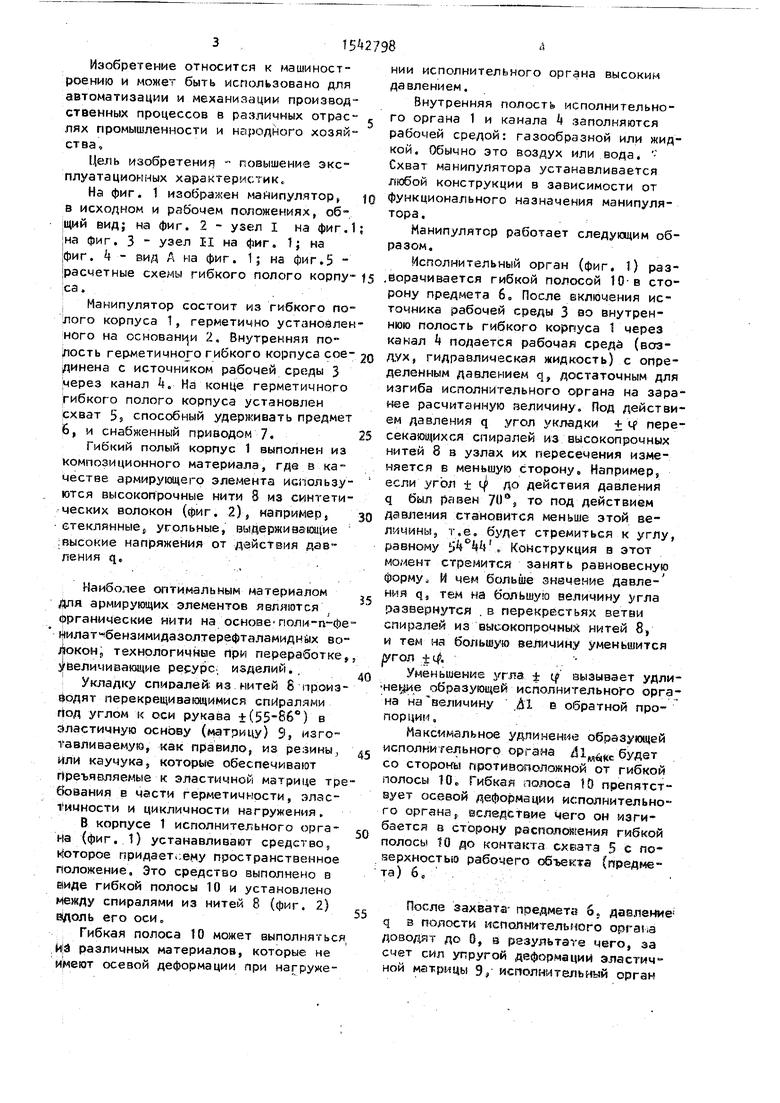
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1987 |
|
SU1583284A1 |
| Манипулятор | 1989 |
|
SU1743843A1 |
| НЕСУЩАЯ ТРУБА-ОБОЛОЧКА В ВИДЕ ТЕЛА ВРАЩЕНИЯ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ (ВАРИАНТЫ) | 1996 |
|
RU2097197C1 |
| ГИБКИЙ РУКАВ ВЫСОКОГО ДАВЛЕНИЯ | 2012 |
|
RU2506485C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВЫСОКОПРОЧНЫХ ТРУБ-ОБОЛОЧЕК ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ (ВАРИАНТЫ) | 1996 |
|
RU2107622C1 |
| АРМИРОВАННАЯ ТРУБА-ОБОЛОЧКА ДЛЯ ВЫСОКОГО ДАВЛЕНИЯ | 1999 |
|
RU2156394C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МОНОЛИТНЫХ КОРПУСНЫХ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННОГО МАТЕРИАЛА С ПРИМЕНЕНИЕМ ДАВЯЩЕЙ ЭЛАСТИЧНОЙ МЕМБРАНЫ | 2021 |
|
RU2761820C1 |
| ГИБКАЯ ПОЛОСА ИЗ ПОЛИМЕРНОГО МАТЕРИАЛА, СОДЕРЖАЩАЯ АРМИРУЮЩИЕ ЭЛЕМЕНТЫ, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ И ОБЪЕМНАЯ ЯЧЕИСТАЯ КОНСТРУКЦИЯ, ВЫПОЛНЕННАЯ С ЕЕ ИСПОЛЬЗОВАНИЕМ | 2021 |
|
RU2760449C1 |
| ЗАЩИТНАЯ ОБОЛОЧКА ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1993 |
|
RU2096678C1 |
| ГИБКАЯ НАСОСНО-КОМПРЕССОРНАЯ ТРУБА | 2021 |
|
RU2778197C1 |
Изобретение относится к машиностроению и может быть использовано для автоматизации и механизации производственных процессов в различных отраслях промышленности и народного хозяйства. Целью изобретения является повышение эксплуатационных характеристик. Для этого гибкий полый корпус 1 герметично установлен на основании 2 и выполнен из композиционного материала, где в качестве армирующих элементов используются высокопрочные нити из синтетических волокон. Укладку спиралей из нитей производят перекрещивающимися спиралями под углом к оси рукава (55 - 86°) в эластичную основу (матрицу) 9. Наиболее оптимальным материалом для армирующих элементов являются органические нити на основе поли-N-фениленбензимидазолтерефталамидных волокон. 1 з.п. ф-лы, 5 ил.
СП 4 1C
ч|
со
00
Изобретение относится к машиностроению и можег быть использовано для автоматизации и механизации производственных процессов в различных отрас- лях промышленности и народного хозяйства,
{ель изобретения - повышение эксплуатационных характеристик.
На фиг. 1 изображен манипулятор, в исходном и рабочем положениях, об™ щий вид; на фиг. 2 - узел I на фиг.1 ,на фиг. 3 узел II на фиг. 1; на фиг. k - вид А на фиг. 1; на фиг.5 - расчетные схемы гибкого полого корпу- са.
Манипулятор состоит из гибкого полого корпуса 1, герметично установленного на основании 2. Внутренняя полость герметичного гибкого корпуса сое- динена с источником рабочей среды 3 через канал 4. На конце герметичного гибкого полого корпуса установлен схват 5, способный удерживать предмет 6, и снабженный приводом 7.
Гибкий полый корпус 1 выполнен из композиционного материала, где в качестве армирующего элемента используются высокопрочные нити 8 из синтетических волокон (фиг. 2), напримерs стеклянныеj угольные, выдерживающие высокие напряжения от действия давления q.
Наиболее оптимальным материалом для армирующих элементов являются 9Р га ни чес кие нити на основе-поли-п-фе милат -бензимидазолтерефталамидных волокон, технологичные При переработке, увеличивающие ресурс, изделий.,
Укладку спиралей, из нитей 8 производят перекрещивающимися спиралями углом к оси рукава ±(55-66°) в Эластичную основу (матрицу) 9, изготавливаемую, как правило, из резины, или каучука, которые обеспечивают Иреъявляемые к эластичной матрице требования в части герметичности, элас- fимности и цикличности нагружения.
В корпусе 1 исполнительного орга- На (фиг. 1) устанавливают средство, Которое придает, ему пространственное положение. Это средство выполнено в виде гибкой полосы 10 и установлено между спиралями из нитей 8 (фиг. 2) его оси.
Гибкая полоса 10 может выполняться Из различных материалов, которые не имеют осевой деформации при нагруже
5
Q
з
п
5
ним исполнительного органа высоким давлением.
Внутренняя полость исполнительного органа 1 и канала k заполняются рабочей средой: газообразной или жидкой. Обычно это воздух или вода. Схват манипулятора устанавливается любой конструкции в зависимости от функционального назначения манипулятора.
Манипулятор работает следующим образом.
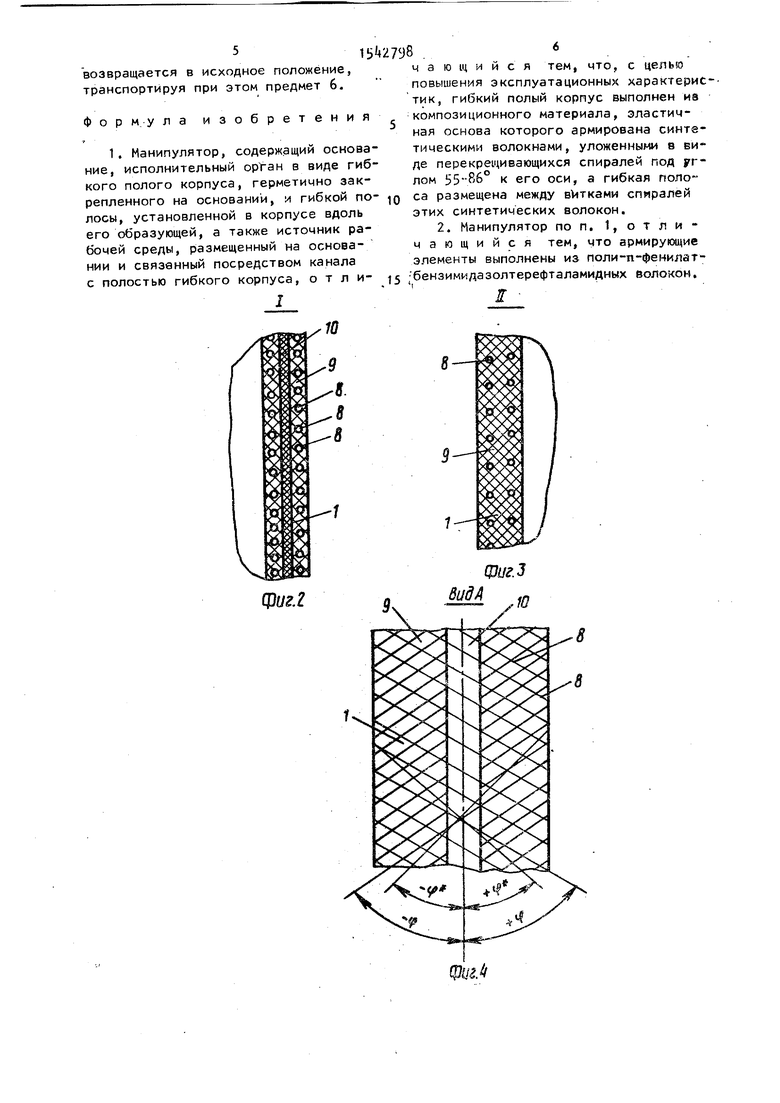
Исполнительный орган (фиг. 1) разворачивается гибкой полосой 10 в сторону предмета 6„ После включения источника рабочей среды 3 во внутреннюю полость гибкого корпуса 1 через канал 1 подается рабочая среда (воздух, гидравлическая жидкость) с определенным давлением q, достаточным для изгиба исполнительного органа на заранее расчитанную величину. Под действием давления q угол укладки + ч пересекающихся спиралей из высокопрочных нитей 8 в узлах их пересечения изменяется в меньшую сторону. Например, если угол ± ч/1 ДО действия давления q был равен 70 , то под действием давления становится меньше этой величины, г.е. будет стремиться к углу, равному $k°№ , Конструкция в этот момент стремится занять равновесную форму, И чем больше знечение давле- ния qa тем на большую величину угла развернутся в перекрестьях ветви спиралей из высокопрочных нитей 8 и тем на большую величину уменьшится
рТОЛ ±Ц.
Уменьшение угла ± if вызывает удли- HehjMe образующей исполнительного органа на величину Ј1 в обратной пропорции,
Максимальное удлинение образующей исполнительного органа Л будет со стороны противоположной от гибкой полосы ТО Гибкая полоса 10 препятствует осевой деформации исполнительного органар вследствие чего он изгибается в сторону расположения гибкой полосы 10 до контакта охвата 5 с поверхностью рабочего объекта (предмета) б.
После захвата- предмет. 65 давление- q в полости исполнительного оргаьз доводя г до 0, з результате чего, за счет сил упругой деформации эластичной матрицы Э} исполнительный орган
-Ч +V.у +yt-f +
COu2.5
fЈV 5li°t,ll
| СПОСОБ ВОССТАНОВЛЕНИЯ КОНТАКТНЫХ НАКОНЕЧНИКОВ | 2005 |
|
RU2275284C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
