(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1987 |
|
SU1583284A1 |
| Манипулятор | 1987 |
|
SU1542798A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Манипулятор | 1984 |
|
SU1229027A1 |
| Манипулятор | 1991 |
|
SU1757876A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| АРМИРОВАННАЯ ТРУБА-ОБОЛОЧКА ДЛЯ ВЫСОКОГО ДАВЛЕНИЯ | 1999 |
|
RU2156394C1 |
| ГИБКИЙ ТРУБОПРОВОД ИЗ ПОЛИМЕРНОГО КОМПОЗИЦИОННОГО МАТЕРИАЛА | 2019 |
|
RU2733797C1 |
| Двигатель линейного перемещения | 1987 |
|
SU1622659A1 |

Использование: автоматизация и механизация производственных процессов в различных отраслях промышленности и народного хозяйства. Сущность изобретения: манипулятор содержит основание, исполнительный орган, выполненный в виде гибкой напорной оболочки из композиционного материала с эластичной основой, армированной слоями перекрещивающихся спиралей, кольца из волокнистого композиционного материала, установленные на поверхности гибкой напорной оболочки, на равном расстоянии друг от друга, силовой элемент, установленный между слоями перекрещивающихся спиралей, выполненный в виде набора полос, каждая из которых расположена на разных образующих оболочки, а их концы закреплены на смежных кольцах, схват и привод перемещения схвата. 3 ил.
Изобретение относится к области машиностроения и может быть использовано для автоматизации и механизации производственных процессов в различных областях промышленности и народного хозяйства.
Целью изобретения является расширение технологических возможностей за счет обеспечения изгиба исполнительного органа в разных плоскостях.
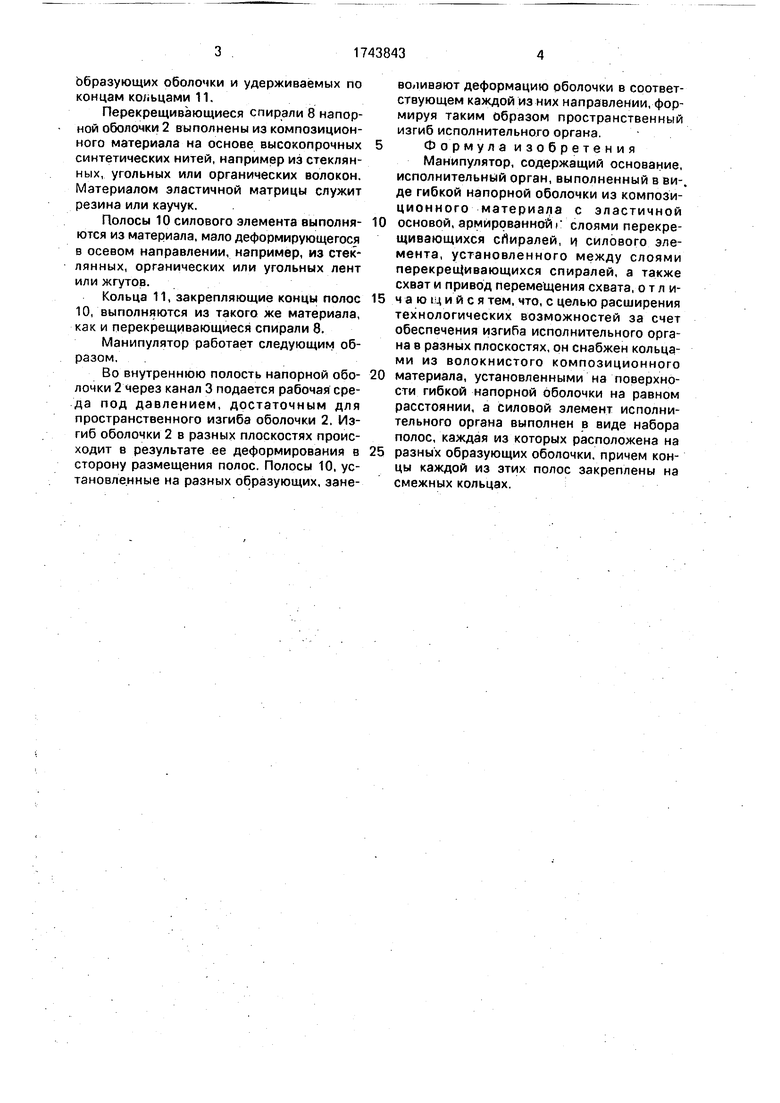
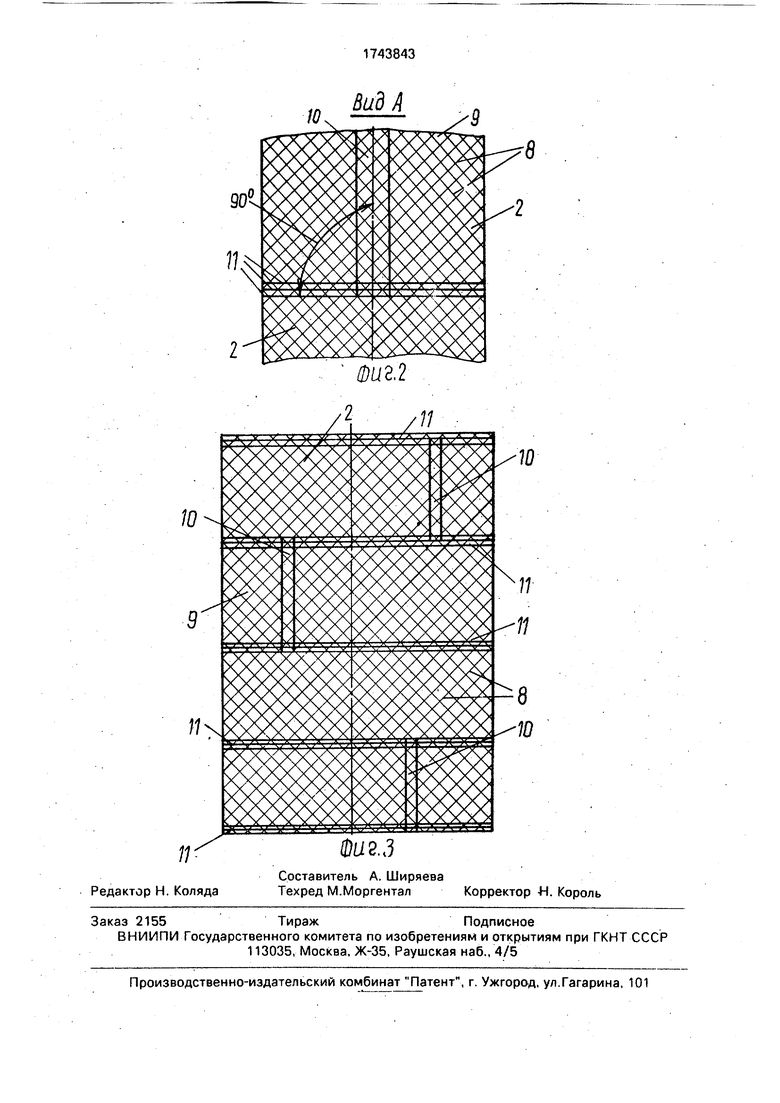
На фиг. 1 показан общий вид манипулятора, на котором сплошными линиями изображено исходное положение манипулятора, пунктирными линиями - рабочее по- ложение манипулятора под действием внутреннего давления на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - развертка напорной оболочки.
Манипулятор состоит из основания 1 и установленного на основании 1 исполнительного органа, выполненного в виде гибкой герметичной напорной оболочки 2. Внутренняя полость герметичной оболочки 2 гидравлически или пневматически соединена через канал 3 с приводом 4 внутреннего давления.
На конце герметичной напорной оболочки 2 установлен снабженный приводом 5 схват 6, предназначенный для удержания предмета 7.
Герметичная напорная оболочка 2 состоит из слоев перекрещивающихся спиралей 8, уложенных в эластичную матрицу 9. Между слоями перекрещивающихся спиралей 8 размещен силовой элемент в виде набора полос 10, размещенных на разных
2
СО 00 4
со
Ьбразующих оболочки и удерживаемых по концам кольцами 11.
Перекрещивающиеся спирали 8 напорной оболочки 2 выполнены из композиционного материала на основе высокопрочных синтетических нитей, например из стеклянных, угольных или органических волокон. Материалом эластичной матрицы служит резина или каучук.
Полосы 10 силового элемента выполняются из материала, мало деформирующегося в осевом направлении, например, из стеклянных, органических или угольных лент или жгутов.
Кольца 11, закрепляющие концы полос 10, выполняются из такого же материала, как и перекрещивающиеся спирали 8.
Манипулятор работает следующим образом.
Во внутреннюю полость напорной оболочки 2 через канал 3 подается рабочая среда под давлением, достаточным для пространственного изгиба оболочки 2. Изгиб оболочки 2 в разных плоскостях происходит в результате ее деформирования в сторону размещения полос. Полосы 10, установленные на разных образующих, эаневоливэют деформацию оболочки в соответствующем каждой из них направлении, формируя таким образом пространственный изгиб исполнительного органа.
Ф о р м у л а и з о б р е т е н и я
Манипулятор, содержащий основание, исполнительный орган, выполненный в ей-, де гибкой напорной оболочки из компози- ционного материала с эластичной
основой, армированной Г слоями перекрещивающихся сгЫралей, и силового элемента, установленного между слоями перекрещивающихся спиралей, а также схват и привод перемещения схвата, о т л ич а ю i д и и с я тем, что, с целью расширения технологических возможностей за счет обеспечения изгиба исполнительного органа в разных плоскостях, он снабжен кольцами из волокнистого композиционного
материала, установленными на поверхности гибкой напорной оболочки на равном расстоянии, а силовой элемент исполнительного органа выполнен в виде набора полос, каждая из которых расположена на
разных образующих оболочки, причем концы каждой из этих полос закреплены на смежных кольцах.
a
en c
I
5
га
g
ч
N/ 4
N
CD
J Jb
CO
CO
л
00
Vs
ч
N/ 4
N
.
П
14 / u
90
фиг.2
11
Физ.З
Редактор Н. Коляда
Составитель А. Ширяева
Техред М.МоргенталКорректор -Н. Король
Вид А
| Манипулятор | 1987 |
|
SU1542798A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
