Изобретение относится к измерению скорости линейного перемещения объектов по з.аданной траектории.
Целью изобретения является повышение информативности.
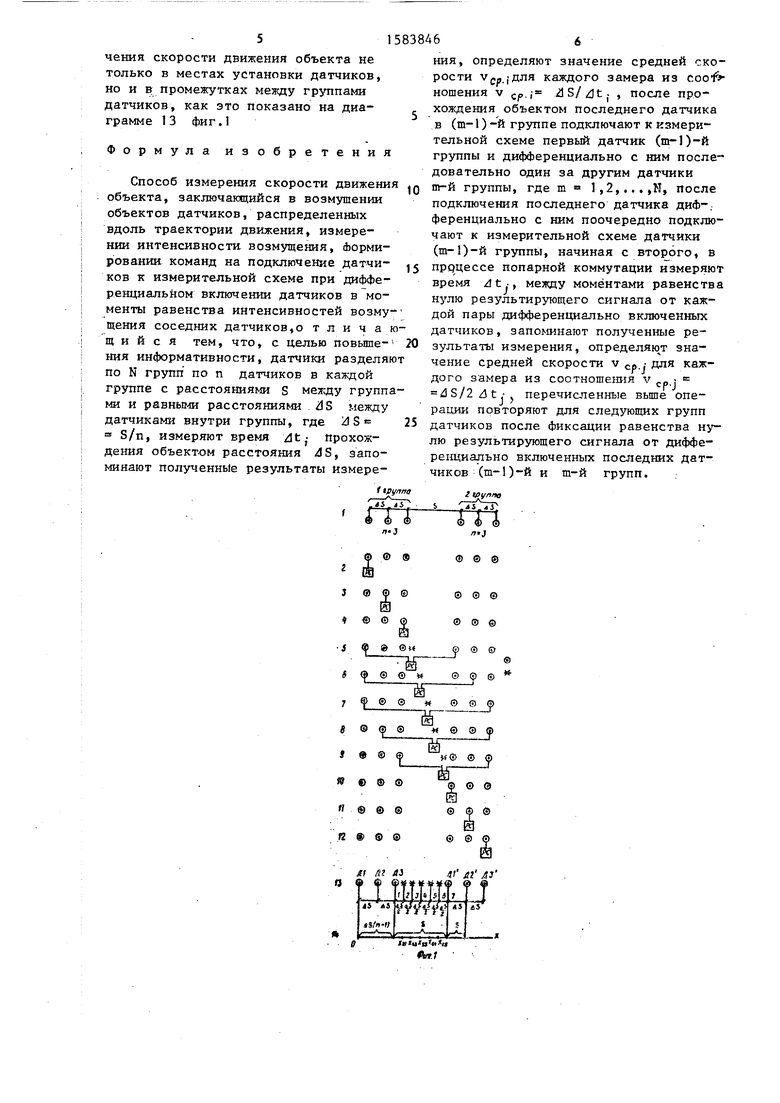
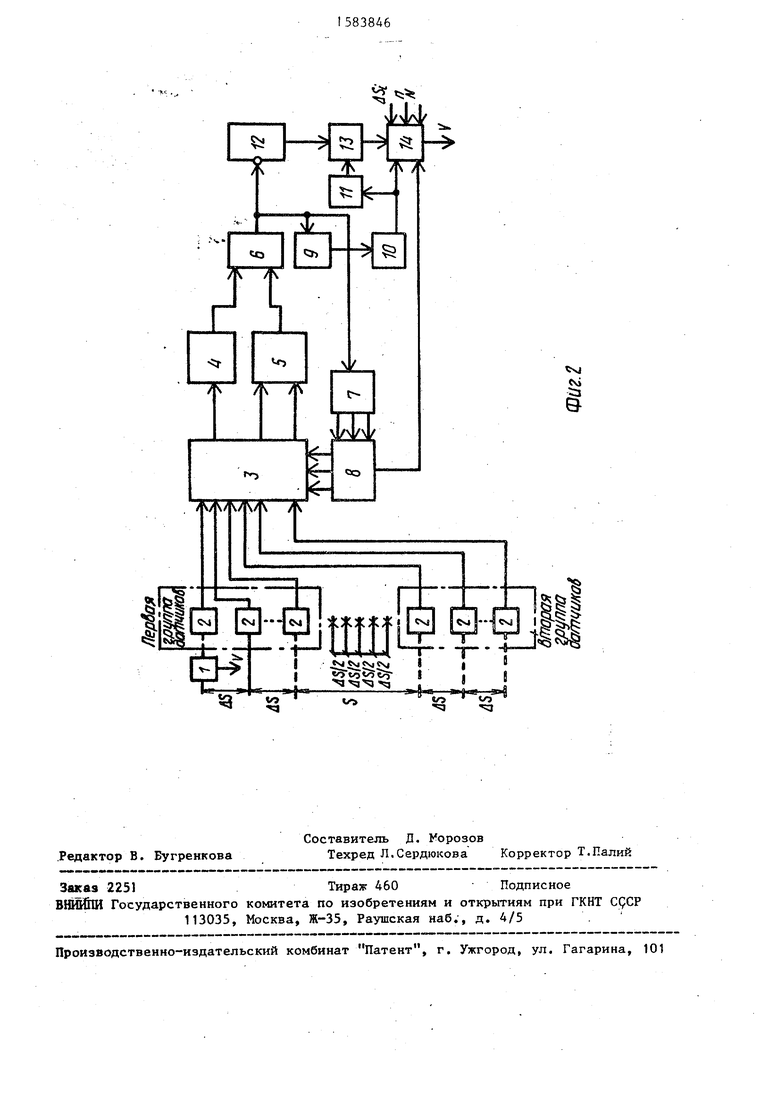
На фиг. 1 приведены диаграммы, поясняющие порядок грегистрации сиг- йалов от датчиков; на фиг. 2 - блок- рхема устройства, реализующего предлагаемый способ.
Диаграмм / на фиг. 1 иллюстрирую пример,когда в распределенном регистрирующем контуре шесть датчиков разбиты на N (две) групп по датч асов в
каждой группе, причем датчики в пе разнесены на расстояние AS - -
друг от друга, где S - расстояние между группами. Переход от диаграммы 1 к
диаграммам 2, 3 и т,д. иллюстрирует очередность и характер объединения датчиков по дифференциальной схеме и подключения их к измерительной (регистрирующей) схеме (PC). Звездочками отмечены дополнительные информационные точки на траектории, не требующие установки специальных датчиков и образованные в соответствии с предлагаемым способом, благодаря дифференциальному включению соответствующих пар датчиков. Так дифференциальное включение первого датчика первой группы с первым датчиком второй группы (диаграмма 5) позволяет регистрировать объект в информационной точке, находящейся на середине расстояния между ними, при принятом расстоянии S между группами эта информационная точка находится н расстоянии & S/2 от последнего датчика первой группы и т.д.
Для измерения скорости объекта 1 устройство содержит датчики 2 (Д) (в данном примере - первую и вторую группу датчиков по три датчика в каждой группе), мультиплексор 3 (Мх), первый 4 и второй 5 анализаторы, эле
мент ИЛИ 6, первый счетчик 7 (Сч- 1) , постоянное запоминающее устройство (ПЗУ) 8, одновибратор г 9 (0В), пер- .вый элемент 10 задержки сигнала (Г,) второй элемент 11 задержки сигнала (%), генератор 12 счетных импульсов 12 (ГИ) , второй счетчик 13 (Сч 2) и вычислитель 14.
При движении объекта 1 вдоль траек тории установки датчиков 2 последние регистрируют изменение интенсивности
поля, вызванное перемещением объекта 1 (диаграмма 2 на фиг.1). В начальный момент времени первый датчик 2 первой группы подключен через мульto
п
25 838464
2мультиплексором 3 по входам первого 4 и второго 5 анализаторов, по сигналу с выхода ПЗУ 8 мультиплексор
3подключает к первому анализатору 4 следующий датчик 2 (второй датчик первой группы, диаграмма 3 на фиг.1). В момент прохода объектом этого датчика 2 первый анализатор 4 формирует импульс калиброванной длительности и через элемент ИЛИ 6 своим передним фронтом переводит первый счетчик
7 в следующее состояние, и останавливает генератор импульс.ов 12, одно временно запускается одновибратор 0В 9 и через первый элемент 10 задержки стробирует входной порт вычислителя 4 для перезаписи информации из второго счетчика 3
15
-
30
35
40
At-, в вычислитель 14, затем через второй элемент 11 задержки сигнала сбрасывается информация счетчика 13. Задний фронт импульса с анализатора 4 вновь запускает генератор 12 импульсов и счетчик 13 начинает отсчет нового интервала времени. Далее процесс регистрации идет аналогично, а после обработки информации от последнего (в данном примере - третьего) датчика первой группы (диаграмма 4 на фиг.1) ПЗУ 8 выдает сигнал мультиплексору 3 на дифференциальное подключение двух датчиков 2 из первой (первый датчик) и второй групп (первый датчик) к входам второго анализатора 5 в -соответствии с записанным в ПЗУ законом коммутации (диаграмма 5 на фиг.1), а также сигнал на вычислитель 14, который (сигнал) соответствует переходу на другое расстояние между информационными точками на траектории движения. После регистрации информационных точек в промежутке между группами датчиков 2 (диа
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения проводника с током | 1988 |
|
SU1672377A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 2015 |
|
RU2593442C1 |
| Устройство для измерения скорости перемещения объекта | 1989 |
|
SU1737346A1 |
| Устройство для измерения скорости перемещения объекта | 1989 |
|
SU1737345A1 |
| Устройство для измерения скорости линейного перемещения объекта | 1987 |
|
SU1569714A1 |
| Цифровой приемник дельта-модулированных сигналов многочастотных кодов | 1989 |
|
SU1683181A1 |
| Способ измерения скорости движения объекта | 1988 |
|
SU1744652A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2001 |
|
RU2208794C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2005 |
|
RU2322680C2 |
| БОРТОВАЯ СТАНЦИЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1989 |
|
SU1841039A1 |
Изобретение относится к автоматике и может быть использовано для измерения и регулирования скорости движения объекта. Всю совокупность датчиков вдоль траектории движения объекта разделяют на N групп по N датчиков в каждой с интервалами S между группами и равными интервалами ΔS между датчиками внутри группы, где *98S=S/N. Измеряют интенсивность возмущения объекта каждым датчиком и формируют команду на подключение датчиков к измерительной схеме по достижении сигналами датчиков заданных значений. Запоминают время ΔT I прохождения объектом расстояния ΔS, значение скорости V CP.I определяется как V ср.I=ΔS/ΔT I. После прохождения объектом последнего датчика в данной группе подключают к измерительной схеме первый датчик данной группы и дифференциально с ним, последовательно один за другим датчики последующей группы, после подключения последнего датчика последующей группы дифференциально с ним, последовательно подключают к измерительной схеме все датчики первой группы, начиная со второго. В процессе попарной коммутации измеряют и запоминают интервалы времени ΔT I между моментами равенства нулю результирующего сигнала от каждой пары дифференциально включенных датчиков, а скорость на этих интервалах находят как V ср.J=ΔS/2ΔT J. После фиксации равенства нулю результирующую сигнала от дифференциально включенных последних датчиков первой и второй групп повторяют описанные операции для следующих групп датчиков, начиная с измерения интервалов времени между сигналами датчиков второй группы. 2 ил.
типлексор 3 к анализатору 4. В момент граммы 5-9 на фиг.) мультиплексор
50
прохода объекта 1 перед этим датчиком 2 анализатор 4 формирует калиброванный по длительности импульс, который через элемент ИЛИ б своим задним фронтом запускает генератор 12 импульсов, и второй счетчик 13 (Сч 2) начинает отсчет интервала времени dt,, а передним фронтом переводит первый счетчик 7 в следующее состояние, и адрес с выхода первого счетчика 7 поступает на ПЗУ 8, запрограммированное заранее, причем ПЗУ 8 программируется так, чтобы обеспечить заданный закон подключения датчиков
3 подключает по порядку датчики 2 второй группы (диаграмма 10 на фиг Л вновь к первому анализатору 4 и далее процесс идет аналогично (диаграм мы И , 12 на фиг.1). Вычисление ск рости на каждом интервале происходи
в вычислителе ражениями
as
14 в соответствии с вы
US
ср.
ЈЛ.
°f J 2/31
J
при этом до1 начала процесса в него вводятся значения N, пи dS. В результате оказываются замеренными зн
граммы 5-9 на фиг.) мультиплексор
3 подключает по порядку датчики 2 второй группы (диаграмма 10 на фиг Л1) вновь к первому анализатору 4 и далее процесс идет аналогично (диаграммы И , 12 на фиг.1). Вычисление скорости на каждом интервале происходит
в соответствии с выUS
ср.
ЈЛ.
°f J 2/31
J
при этом до1 начала процесса в него вводятся значения N, пи dS. В результате оказываются замеренными зна ® © ©
©@© « s 0 ж foг
9 ®
и©©
да о © © ч © & © п ® © ©
л-З
® 9
© © ©
®
© © ©
© ©
© © ©
и ©«
„ ®
© ©
© ф ©
и©©
©©S
©©©
©©©
it иг аз
61 A3 9 9
Ъа1
| Способ измерения скорости движения объекта | 1982 |
|
SU1068818A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
