Изобретение относится к аналоговой вычислительной технике и может быть использовано в тренажерах для обучения водителей гусеничных машин
Целью изобретения является повышение точности моделирования колебаний гусеничной машины при изменении угла наклона местности0
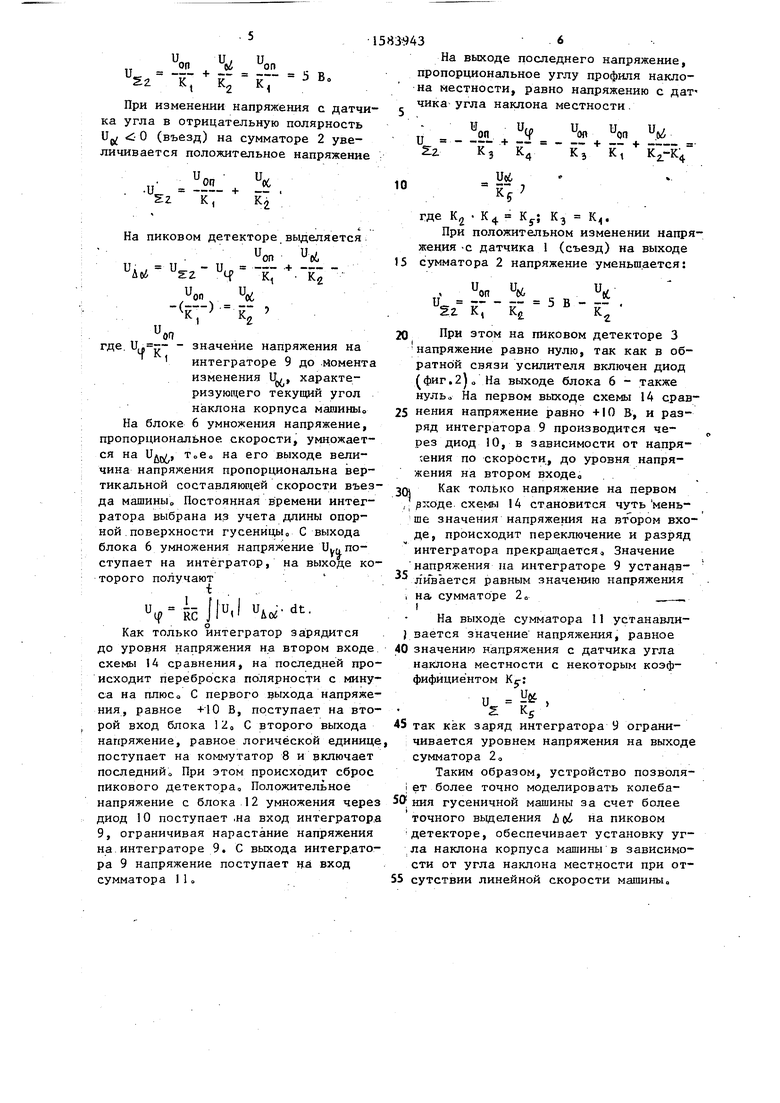
На фиго изображена функциональная схема устройства; на фиг02 - схема пикового детектора; на фиг„3 - схема сравненияо
Устройство содержит датчик 1 угла
На схеме 15 сравнения происходит сравнение величины напряжения -Uon и |Uwl При |Uyxl 0 на выходе схемы 15 сравнения напряжение равно логической единице (при появлении скорости Uyj(0l схема переключается с
наклона местности, первый сумматор 2, J5 логической единицы на логический нуль,
30
35
пиковый детектор 3, блок 4 задания линейной скорости, блок 5 выделения модуля напряжения, первый блок 6 умножения, инвертирующий усилитель 7, второй коммутатор 8, интегратор 9, 20 выпрямительный диод 10, второй сумматор 11, второй блок 12 умножения,первый коммутатор 13, вторую 14 и первую 15 схемы сравненияо В состав узлов входят также операционные усили- 25 тели 16, резисторы 17, диоды 18, конденсатор 19 и стабилитрон 20 0
Устройство работает следующим об- разомр
В исходном положении с выхода датчика 1 угла наклона местности (в ка честве которого может быть блок считывания топограмм, с киноленты или
потенциометр, запитэнный двуполярным напряжением ±10 В) снимается нулевое напряжения U О (U имеет диапазон изменения напряжения от -10 до +10В)0 Это напряжение подается на вход сумматора 2. На другой вход сумматора 2 подается опорное напряжение -Uon« ; На этом сумматоре производится перевод из двуполярной области изменения- напряжения, пропорционального углу наклона местности, в однополярную полярную положительную область
%z 5 В - 0,b U. Следовательно, с выхода сумматора 2 напряжение, равное 5 В, поступает на входы пикового детектора -3 и схемы 14 сравненияо С выхода пикового детектора 3 напряжение (Ug U{n) -5 В (11ц 0 в начальный момент) подается на вход блока 6„ С блока 4 задания линейной скорости (в качестве которого может быть потенцио-., метр, запитанный двуполярным напряжением ± 10 В, или вычислительное устройство, моделирующее динамику машины) напряжение, пропорциональное скоСигнал логической единицы подается на управляющий вход коммутатора 13 и включает его На схеме 14 () производится сравнение величин напряжений игг 5 В и При этом Us Uy, следовательно, на первом выходе схемы 14 напряжение равное -10 В, а на втором выходе - логическому нулю о
Через включенный коммутатор 13 напряжение -10 В поступает на вход интегратора 9 и заряжает его до уров40
ня U
T2L
5 Во Как только U,
ц, превысит
иг2 схема 14 сравнения переключается с -10 на +10 В на первом выходе, а на втором выходе - с логического нуля на логическую единицу Последнее напряжение включает коммутатор 8„ Происходит закорачивание запоминающего конденсатора () в пиковом детекторе, что означает сброс и подготовку пикового детектора 3 к работе. При этом на входе будет Ц. - - Uq 0, а на выходе Uuftir О С первого выхода схемы 14 через включенный коммутатор 13 напряжение +10 В поступает на второй вход интегратора 9, и начинается разряд интегратора0 Такой процесс разряд-заряд интег- 45 ратора имеет колебательный характер
около значения U
2:2
Т обо ПРОИСХОДИТ
ограничение напряжения 11ц, до уровня
игг
и
50
Г
и.
Ч
- 5
2TZ К
в
При движении на ровном участке j U ух (; О, схема 15 переключается, а на ее выходе напряжение равно логическому нулю
Управляющий сигнал со схемы 15 сравнения выключаат коммутатор 13, и ограничение интегратора производится через блок 12 умножения и диод 10 уровня
рости Uvx равное нулю, подается на блок 5 выделения модуля напряжения, с выхода которого напряжение подается на входы блока 6, блока 12 умножения и схемы 15 сравнения Сл,едова- тельно, на двух входах интегратора 9 напряжение равно нулю
На схеме 15 сравнения происходит сравнение величины напряжения -Uon и |Uwl При |Uyxl 0 на выходе схемы 15 сравнения напряжение равно логической единице (при появлении скорости Uyj(0l схема переключается с
логической единицы на логический нуль,
Сигнал логической единицы подается на управляющий вход коммутатора 13 и включает его На схеме 14 () производится сравнение величин напряжений игг 5 В и При этом Us Uy, следовательно, на первом выходе схемы 14 напряжение равное -10 В, а на втором выходе - логическому нулю о
Через включенный коммутатор 13 напряжение -10 В поступает на вход интегратора 9 и заряжает его до уров
ня U
T2L
5 Во Как только U,
ц, превысит
иг2 схема 14 сравнения переключается с -10 на +10 В на первом выходе, а на втором выходе - с логического нуля на логическую единицу Последнее напряжение включает коммутатор 8„ Происходит закорачивание запоминающего конденсатора () в пиковом детекторе, что означает сброс и подготовку пикового детектора 3 к работе. При этом на входе будет Ц. - - Uq 0, а на выходе Uuftir О С первого выхода схемы 14 через включенный коммутатор 13 напряжение +10 В поступает на второй вход интегратора 9, и начинается разряд интегратора0 Такой процесс разряд-заряд интег- ратора имеет колебательный характер
,
около значения U
2:2
Т обо ПРОИСХОДИТ
ограничение напряжения 11ц, до уровня
игг
и
0
Г
и.
Ч
- 5
2TZ К
в
При движении на ровном участке j U ух (; О, схема 15 переключается, а на ее выходе напряжение равно логическому нулю
Управляющий сигнал со схемы 15 сравнения выключаат коммутатор 13, и ограничение интегратора производится через блок 12 умножения и диод 10 уровня
и.,
и,
Ј2
иоп V
к; к
on
К
При изменении напряжения с датчика угла в отрицательную полярность U Ј 0 (въезд) на сумматоре 2 увеличивается положительное напряжение
На выходе последнего напряжение,
5 Во пропорциональное углу профиля наклона местности, равно напряжению с дат чика угла наклона местности
U
2z
°i + 5г
ц
ил
и.
к,
. к
№ ОП (
++
К э К t K2.K4
иоп
+
Ч к.
ос
На пиковом детекторе выделяется
иоп об UAoi UZ2 U4 K7 .K2
Лп -и
-(Ј) v
и 2 иоп
где U(.-- - значение напряжения на
интеграторе 9 до момента изменения U., характеризующего текущий угол наклона корпуса машины На блоке 6 умножения напряжение, пропорциональное скорости, умножается на U
Лоб
тОе0 на его выходе величина напряжения пропорциональна вертикальной составляющей скорости въезда машины,, Постоянная времени интегратора выбрана из учета длины опорной поверхности гусеницы„ С выхода блока 6 умножения напряжение )у,. поступает на интегратор, на выходе которого получают
Vicjlu
Как только интегратор зарядится
U dtдо уровня напряжения на втором входе схемы 14 сравнения, на последней происходит переброска полярности с минуса на плюсо С первого выхода напряжения, равное +Ю В, поступает на второй вход блока 12, С второго выхода напряжение, равное логической единице, поступает на коммутатор 8 и включает последнийо При этом происходит сброс пикового детектора,, Положительное
На выходе сумматора 11 устанавли- } зается значение напряжения, равное 40 значению напряжения с датчика угла наклона местности с некоторым коэф- фифициентом Kj-:
и .Л
2 К5
45 так как заряд интегратора 9 ограничивается уровнем напряжения на выход сумматора 20
Таким образом, устройство позволя ет более точно моделировать колебанапряжение с блока 12 умножения через 50 ния гусеничной машины за счет более
U
2z
°i + 5г
ц
ил
и.
к,
. к
U«6
Ц
№ ОП (
++
К э К t K2.K4
где К2 - К4 Kff; К3 Kv
При положительном изменении напряжения -с датчика 1 (съезд) на выходе сумматора 2 напряжение уменьшается:
U
U,
оп
U,
W
2г К,
к„
urf
5B-r
К2
, 2.
0 При этом на пиковом детекторе 3 напряжение равно нулю, так как в обратной связи усилителя включен диод (фиг.2)„ На выходе блока 6 - также нуль, На первом выходе схемы 14 срав5 нения напряжение равно +10 В, и разряд интегратора 9 производится через диод 10, в зависимости от напряжения по скорости, до уровня напряжения на втором входе0
0 Как только напряжение на первом , рходе схемы 14 становится чуть меньше значения напряжения на втором входе, происходит переключение и разряд интегратора прекращаетсяа Значение напряжения на интеграторе 9 устанав- л ивается равным значению напряжения
на сумматоре 2„ I
На выходе сумматора 11 устанавли- } зается значение напряжения, равное 0 значению напряжения с датчика угла наклона местности с некоторым коэф- фифициентом Kj-:
и .Л
5
2 К5
5 так как заряд интегратора 9 ограничивается уровнем напряжения на выходе сумматора 20
Таким образом, устройство позволяет более точно моделировать колеба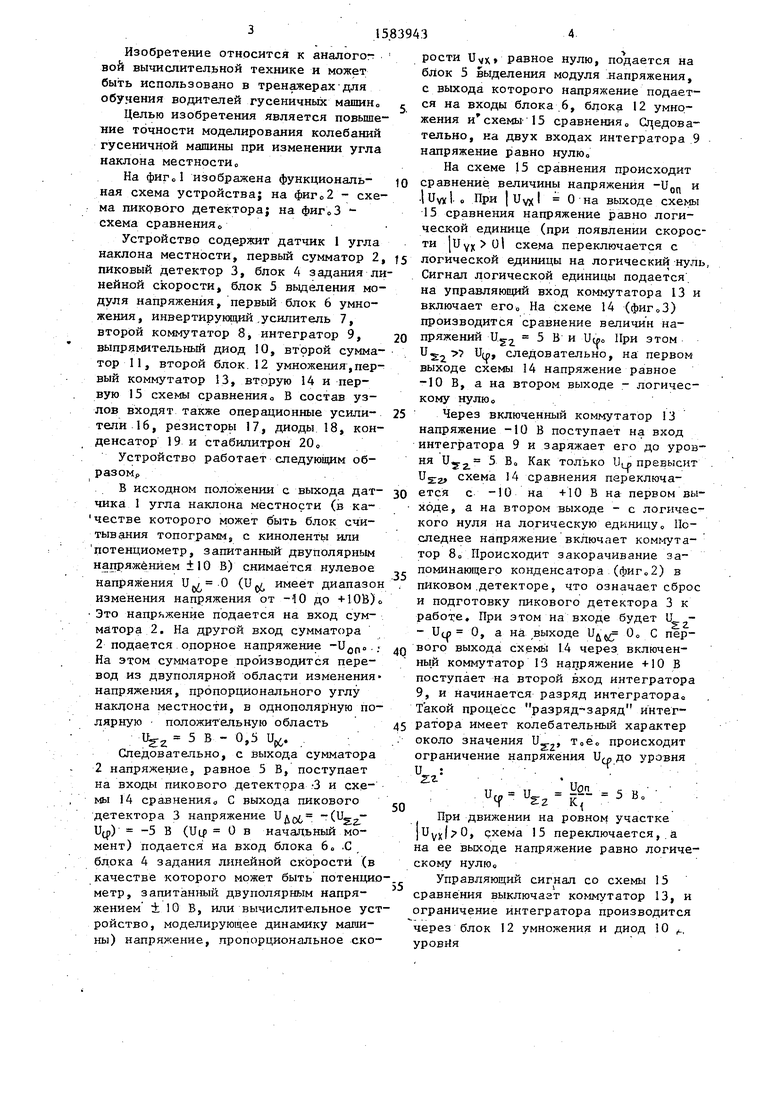
| название | год | авторы | номер документа |
|---|---|---|---|
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования колебаний гусеничных машин | 1982 |
|
SU1023366A2 |
| Устройство для моделирования колебаний гусеничных машин | 1980 |
|
SU959097A2 |
| Устройство для моделированияКОлЕбАНий гуСЕНичНыХ МАшиН | 1979 |
|
SU842865A1 |
| Устройство для моделирования газотурбинного двигателя | 1983 |
|
SU1121683A1 |
| Тренажер для обучения водителей транспортных средств | 1985 |
|
SU1257694A1 |
| Устройство для моделирования системы охлаждения двигателя внутреннего сгорания | 1983 |
|
SU1170470A1 |
| Устройство контроля технического состояния механических объектов по вибрационным нагрузкам | 1989 |
|
SU1703991A2 |
| Влагомер | 1986 |
|
SU1368742A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССЕЯНИЯ ЭНЕРГИИ И СОБСТВЕННОЙ ЧАСТОТЫ МЕХАНИЧЕСКОЙ КОЛЕБАТЕЛЬНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2025685C1 |
Устройство содержит датчик угла наклона местности, блок задания линейной скорости, первый блок умножения, интегратор, первый и второй сумматоры. С целью повышения точности моделирования колебаний при изменении угла наклона местности, оно дополнительно содержит первую и вторую схемы сравнения, блок выделения модуля напряжения, второй блок умножения, выпрямительный диод, первый и второй коммутаторы, инвертирующий усилитель и пиковый детектор.
диод 10 поступает .на вход интегратора 9, ограничивая нарастание напряжения на интеграторе 9. С выхода интегратора 9 напряжение поступает на вход сумматора 11„
точного выделения ДфЈ на пиковом детекторе, обеспечивает установку угла наклона корпуса машины в зависимости от угла наклона местности при от- сутствии линейной скорости машины„
77
Первый Вход Я
MBaMMv
Второй Вход
77
Фиг. 2
Первый Выход Второй Выход
| Устройство для моделированияКОлЕбАНий гуСЕНичНыХ МАшиН | 1979 |
|
SU842865A1 |
