(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КОЛЕБАНИЙ ГУСЕНИЧНЫХ МАШИН
1
Изобретение относится к области аналоговой вычислительной техники и может быть использовано в тренажерах для обучения водителей гусеничных машин и в исследовательских стендах.
Устройство для моделирования колебаний гусеничных машин по авт. св. № 842865 содержит датчик угла наклона местности, выход которого через формирователь заднего фронта сигнала подключен к первому входу интегратора, блок задания линейной скорости, исполнительный механизм, инерционное звено, блок умножения и блок моделирования подвески гусеничной машины, выход которого соединен с исполнительным механизмом, а вход блока моделирования подвески гусеничной машины связан с первым входом инерционного звена и подключен к выходу интегратора, второй вход которого соединен с выходом блока умножения, входы которого соединены соответственно с выходами блока задания линейной скорости и инерционного звена, второй вход которого подключен к выходу датчика угла наклона местности. Блок моделирования подвески гусеничной машины содержит источник питания, инверторы, сумматоры и интеграторы, первый вход первого.сумматора является входом блока, выход первого сумматора через первый интегратор подключен к входам второго интегратора и первого инвертора, выход которого соединен с вторым
5 входом первого сумматора, третий вход которого подключен к выходу второго интегратора, связанному с первым входом второго сумматора, второй вход которого соединен с выходом источника питания, выход вто1Q рого сумматора подключен ко входу второго инвертора, .выход которого является выходом блока 1.
Недостатком этого устройства является то, что в нем не моделируются колебания гусеничной .машины, вызванные силой инер5 ции, возникающей при неравномерном движении, например при торможении или разгоне.
Цель изобретения - расширение функциональных возможностей за счет моделирования колебаний при изменяющейся скорости движения мащины.
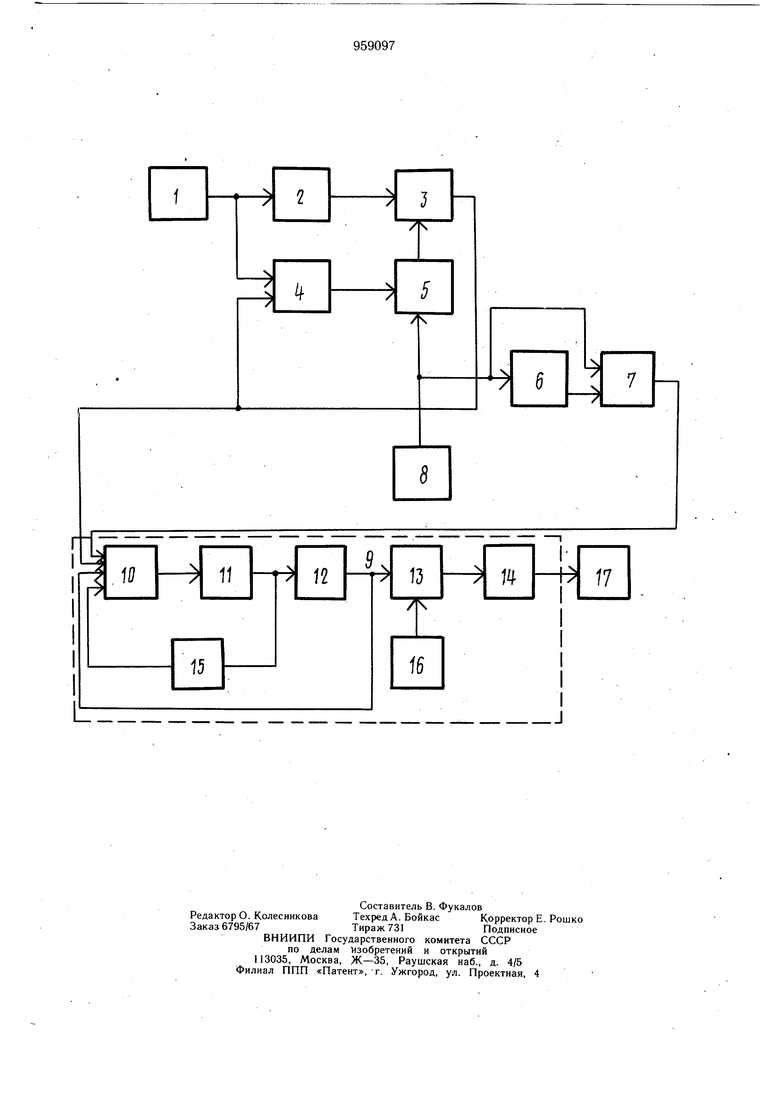
Поставленная цель достигается тем, что устройство для моделирования колебаний гусеничной машины дополнительно содержит второе инерционное звено и суммирующеинерционное звено, причем вход второго инерционного звена и первый вход суммирующе-инерционного звена соединены с выходом блока задания линейной скорости, второй вход суммирующе-инерционного звена подключен к выходу инерционного звена, а выход - к четвертому входу первого сумматора. На чертеже изображена функциональная схема устройства. Схема устройства содержит датчик угла наклона местности, формирователь 2 заднего фронта сигнала, интегратор 3, первое инерционное звено 4, блок 5 умножения, второе инерционное звено 6, суммирующе-инерционное звено 7, блок 8 задания линейной скорости, блок 9 моделирования подвески гусеничной машины, сумматор 10, интеграторы 11, 12, сумматор 13, инверторы 14, 15, источник 16 постоянного напряжения, исполнительный механизм 17. Устройство работает следующим образом. С выхода датчика 1 угла наклона местности снимается напряжение LU и подается на формирователь 2 заднего фронта и инер.ционное звено 4. В исходном состоянии выходное напряжение Utf интегратора 3 с ораничиваемым уровнем, пропорциональное углу наклона неподрессоренной части машины, равно напряжению U , т. е. в этом случае воспроизводится режим, когда машина движется по местности с постоянным углом наклона опорной поверхности гусениц. в Поскольку и и и равны, но противоположны по знаку, то напряжение на выходе инерционного звена 4 в установившемся режиме и на первом входе блока умножения 5 равно нулю. На второй вход блока 5 подается напряжение Uv , пропорциональное скорости прямолинейного движения с блока 8. При этом напряжение на выходе блока 5 равно нулю. При моделировании увеличения угла наклона местности на Act на выходе датчика 1 происходит увеличение напряжения на величину AU,T. е. общее выходное напряжение становится равным U/ + AU,/.. Последнее поступает на однн из входов инерционного звена 4 и на вход формирователя 2, через который оно проходит без изменения, и поступает на вход интегратора 3, увеличивая урбвень заряда интегратора 3 до величины Ш -f ДИ. В первый момент напряжение на выходе интегратора 3 Ucf -LJ и поступает на втоРО.Й вход инерционного звена 4 с противоположным знаком. На выходе последнего появляется напряжение АЦ, которое умножается на напряжение Uv . Произведение А подается на вход интегратора 3 и заряжает его до уровня ограничения АЦ( При возрастании выходного напряжения интегратора 3 уменьшается разность напряжений /Ue( + Uc. Для того, чтобы на входе блока 5 умножения величина напряжения AUoi поддерживалась .примерно постоянной, используется инерционное звено 4. Напряжение с выхода интегратора через блок 9 поступает на исполнительный механизм 17, который поднимает кабину на угол, соответствующий напряжению Uty. Таким образом моделируется изменение угла неподрессоренной части гусеничной машины на подъем. При уменьшении угла наклона местности на величину на выходе датчика 1 происходит уменьшение напряжения на величину АЦх, т. е. общее выходное напряжение становится равным Ц{ - Это напряжение поступает на один вход инерционного звена 4, на другой вход которого поступает напряжение с выхода интегратора 3, на котором в первый момент имелось напряжение Ucf- U. В результате на выходе инерционного звена 4 появляется напряжение причем знак его противоположен знаку напряжения моделировании подъема. Напряжение, равное UyU, с выхода блока 5 поступает на вход интегратора 3 и разряжает его до тех пор, пока его выходное напряжение не станет равным Ц(.- Uf. В этом случае напряжение на выходах блоков 4-и 5 равно нулю. Напряжение Uv,пропорциональное скорости прямолинейного движения гусеничной машины, с выхода блока 8 поступает на один из входов блока 5 умножения. Чем меньше Uv, тем меньше произведение иуид и меньше изменяется напряжение Uy на выходе интегратора 3, и наоборот. Это значит, что при увеличении скорости движения машины по местности с изменяющимся углом профиля увеличивается скорость изменения угла неподрессоренной части гусеничной машины в соответствии с этим профилем. Колебания неподрессоренной части гусеничной машины через подвеску передаются на подрессоренную часть, где находится водитель. Уравнение колебаний подрессоренной части машины запишется следующим образом. Г-Ь Р-ТЧ К2 ч А, где ч - угол наклона подрессоренной Р - декремент затухания; частота собственных колебаний подрессоренной части; А - внешнее воздействие. С помощью сумматора 10 производится сложение напряжений, пропорциональных Pf. KU, А. Внешним воздействием в данном случае является напряжение J , пропорциональное углу наклона подрессоренной части. На выходе сумматора 10 формируется напряжение, пропорциональное угловому ускорению подрессоренной части. Это напряжение интегрируется интегратором 11 и через инвертор 15 подается на вход сумматора 10. Напряжение с выхода интегратора 11, пропорциональное ,;гловой скорости колебаний подрессоренной части, интегрируется с помощью интегратора 12 и на его выходе появляется напряжение, пропорциональное углу наклона подрессоренной части, которое также поступает на один из входов сумматора 10 и на вход сумматора 13, в котором суммируется с напряжением источника 16 питания, пропорциональным значению угла, соответствующего горизонтальному положению подрессоренной части. С выхода сумматора 13 через инвертор 14 напряжение подается на исполнительный механизм. Инвертор 14 служит для согласования знаков напряжений.
Если напряжение Uv с выхода блока 8, пропорциональное линейной скорости движения, в течение некоторого времени остается постоянным, то напряжение на выходе суммирующе-инерционного звена равно нулю так как коэффициент передачи инерционного звена 6 выбирается равным единице. Поэтому на входах звена 7 напряжения одинаковы по величине и противоположны по знаку.
Если напряжение Uv изменилось на величину AUv, что соответствует увеличению скорости мащины, то напряжение на выходе инерционного звена 6 изменяется с некоторым запозданием. В результате это напряжение вычитается из напряжения Uv, т. е. результирующее напряжение на входе звена 7 резко изменяется. Для того, чтобы это изменение не было слищком резким и служит звено 7. Постоянная времени последнего выбирается из условия обеспечения
реальности колебаний гусеничной машины.
С выхода звена 7 напряжение поступает на один из входов сумматора 10 и участвует в формировании напряжения, пропорционального углу наклона подрессоренной части.
Устройство позволяет воспроизводить колебания кабины тренажера при воздействии на обучаемого линейных ускорений. Это позволяет повысить качество обучения на тренажере, сократив при этом время обучения на реальной машине. В результате экономятся моторесурс учебных машин, горюче-смазочные материалы и затраты на поддержание учебных трасс.
Формула изобретения
Устройство для моделирования колебаний гусеничной машины по авт. св. №842865 отличающееся тем, что, с целью расширения функциональных возможностей за счет моделирования колебаний при из.меняющейся скорости машины, оно дополнительно содержит второе инерционное звено и суммирующе-инерционное звено. причем вход второго инерционного звена и первый вход суммирующе-инерционного звена соединены с выходом блока задания линейной ,скорости, второй вход суммирующе-инерционного звена подключен к выходу второго инерционного звена, а выход - к четвертому входу первого сумматора.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 842865, кл. G 06 G 7/70, 1979 (прототип).
