1
Изобретение относится к учебно- тренировочным средствам и может быть использовано для обучения водителей транспортных средств.
Цель изобретения - повьшение эффективности обучения.
На чертеже изображена блок-схема тренажера для обучения водителей транспортных средств.
Устройство содержит блок 1 считывания топограмм, связанный с кинопроектором 2 и соединенный с одним из входов блока 3 умножения, выход которого подключен к одному из входов сумматора 4, соединенному другим входом с выходом моделирующего блока 5, а выходом - через интегратор 6 с одним из входов блока 7 умножения, другой вход которого подключен к выходу задатчика 8 скорости, соединенному с блоком 3 умножения, а выход - к входу блока 9 управления поворотом кинопроектора и с входом интегратора 10, который соединен в последовательную цепь с квадратором 11, интегратором 12, компаратором 13, выход которого подключен к одному Из входов элемента И 14, другой ,вход которого соединен с выходом задатчика 15 времени, соединенного с входом элемента 16 задержки. Выход элемента И 14 соединен с одним из входов элемента ИЛИ 17, другой вход которого подключен к выходу задатчика 18 режима движения, а выход - к счетчику 19 импульсов, соединенному другим-входом с задатчиком 18, а выходом - с входом дешифратора 20. Моделирующий блок 5 подключен, входами к датчикам 21 положения органов 22 управления и выполнен на резисторах 23-30, умножителе 31, сумматоре 32, операционных усилителях 33-3.4, диодах 35-36. Зaдatчик 8 скорости содержит резисторы 37 и аналоговые коммутаторы 38.
Устройство работает следующим образом.
В начале тренировки обучаемый 39 производит запуск тренажера. Для этого он кратковременно нажимает кнопку 40 пуска задатчика 18 режима движения, тем самым коммутируя цепь, содержащую источник питания, напряжение на котором равно уровню логической единицы, при этом на его первом выходе появляется импульс, который йключает задатчик 15 време57694 . J
ни и, пройдя через элемент ИЛИ 17, регистрируется счетчиком 19 импульсов в виде кода на его выходе. Этот код с помощью дешифратора 20 преоб.5 разуется в управляющий сигнал, который, воздействуя на задатчик 8 скорости, задает на его выходе напряжение, пропорциональное скорости машины : фиксированной скоростью.
to Этот сигнал поступает на вход блока 41 управления скоростью проекции кинопленки в кинопроекторе 2, и пе- ред обучаемым 39 на экране 42 воз- :никает картина движения на трассе.
15 Блок 1 считывания топограммы преобразует запись топограммы на кинопленке в напряжение, пропорциональное кривизне трассы, которую видит обучаемый 39 на экране 42. Это напряже20 ние с помощью блока 3 умножения умножается на напряжение, пропорциональное скорости движения, поступающее на его второй вход с выхода задатчика 8 скорости. В результате на выходе фор25 мируется напряжение, пропорциональное угловой скорости трассы относительно машины, которое затем посту- ;пает на вход сумматора 4, на второй jвход которого подается напряжение,
30 пропорциональное угловой скорости поворота транспортного средства с выхода моделирующего блока 5, где оно моделируется исходя из значений напряжений, поступак)щих с датчиков
35 2t положения органов 22 управления и задатчика 8 скорости. На выходе сумматора 4 формируется напряжение, пропорциональное угловой скорости машины относительно трассы. Оно ин40 тегрируется интегратором 6, на выходе которого формируется напряжение, пропорциональное углу поворота машины относительно трассы, которое умножается блоком 7 умножения на
45 напряжение, пропорциональное скорости, поступающей с задатчика 8 скорости. В результате на выходе формируется напряжение, пропорциональное линейной скорости отклонения машины
52 от трассы. Оно поступает на вход
интегратора 10 и вход блока 9 управления поворотом кинопроектора, при этом последний осуществляет поворот кинопроектора 2 в горизонтальной
55 шоскости, что приводит к смещению изображения на экране 42. Обучаемый 39, видя это смещение, действует органами 22 управления так, чтобы нап3
ряжение с вькода моделирующего блока 5 было равно напряжению на выход блоЛа 3 умножения, но противоположно по знаку, т.е. добивается того, чтобы угловая скорость машины относительно трассы стала равна нулю, тем самым компенсирует смещение изоражения на экране 41.
Поступая на вход интегратора 10, напряжение интегрируется. На выходе интегратора формируется напряжение, пропорциональное отклонению машины от трассы. После возведения в квадрат с помощью квадратора 11 и интег- рирования интегратором 12 на выходе последнего формируется напряжение, пропорциональное суммарному среднему квадратичному отклонению машины от трассы, которое поступает на вход компаратора 13, где оно периодически сравнивается с опорным напряжением, пропорциональным, допустимому значению среднего квадратичного отклонения от трассы за данный период задатчиком 15 времени.
Если выполняется условие.
,2
(1)
где Ugi - напряжение, пропорциональное среднему квадратичному отклонению машины от трассы;
Я
и,гд - напряжение, пропорциональное допустимому значению среднего квадратичного отклонения машины от трассы
на выходе компаратора 13 формируется логическая единица, если не выполняется - логический нуль. Этот сигнал поступает на вход элемента И 14, другой вход которого связан с выходом задатчика 15 времени, который устроен таким образом, что через заданные промежутки времени на его выходе формируется импульс единичного логического уровня.
Если с приходом импульса на вход элемента И 14 на выходе компаратора 13 формируется единица, то на выходе элемента И 14 также формируется импульс единичного логического уровня, который регистрируется счетчиком 19 импульсов в виде кода на выходе и преобразуется дешифратором 20 в управляющий сигнал, который, воздействуя на задатчик 8 скорости, за576944
дает на его выходе новое значение напряжения, пропорционального скорости движения машины с более высокой фиксированной скоростью. 5 Тот же импульс, сформированной на выходе задатчика 15 времени, пройдя через блок 16 задержки, сбрасывает напряжение на выходе интегратора 12 до нуля, и обучаемый выполняет уп10 ражнение на более высокой скорости. Если, выполняя движение, обучаемый 39 не справился с выполнением условия (1), то увеличения скорости не происходит, и упражнение повторяется на
5 прежней скорости до тех пор, пока обучаемый не вьшолнит это условие, т.е., чем ниже качество вождения, тем дольше будет длиться тренировка. После выполнения упражнения на
20 самой высокой скорости с дешифратора 20 на задатчик 8 скорости поступает сигнал, останавливающий машину, после чего обучаемьй кратковременным нажатием кнопки сброса 40 задатчика
5 18 режима движения устанавливает автоматические устройства тренажера в исходное состояние, при этом на втором выходе задатчнка 18 появляется импульс, который выклю--1ает задатчик
0 15 времени и устанавливает счетчик 19 импульс на нуль.
Формула изо.бретения
Тренажер для обучения водителей транспортных средств, содержащий кинопроектор и связанный с ним входом блок считывания топограмм, вы- ,ход которого соединен с одним из
входов первого блока умножения, подключенного выходом к одному из входов сумматора, другой вход которого соединен с выходом моделирующего блока, а выход - с входом первого интегратора, подключенного выходом к одному из входов второго блока умножения, выход которого соединен с входом блока управлершя поворотом кинопроектора и с входом второго интегратора, а один из входов моделирующего блока соединен с выходами датчиков положения органов управления скоростью проекции, о т л и - чающийся тем, что, с целью повьш1ения эффективности обучения, он снабжен задатчиком режима движения, квадратором, компаратором, эле5
ментом И, элементом ИЛИ, счетчиком
импульсов, элеме нтом задержки, третьим интегратором, задатчиком времени, дешифратором и эадатчиком скорости, выход которого соединен с другими входами первого и второго блоков умножения, входом блока управления скорости проекции и входом моделирующего блока, а его вход соединен с выходом дешифратора, вход которого соединен с выходом счетчика импульсов, подключенного одним и другим входами соответственно к одним иэ выходов задатчика режима и выходу элемента ИЛИ, входы которого
57694«
соединены соответственно с выходом элемента И и другим выходом задатчика режима, соединенным с одним, из входов задатчика времени, другой вход которого соединен с одним из вькодов задатчика режима, а выход - с входом элемента задержки и одним из входов элемента И, другой вход которого подключен к выходу компа- JO ратора, соединенному входом с выходом третьего интегратора, входы которого подключены соответственно. к выходу элемента задержки и выходу квадратора, соединенного входом с J5 выходом второго интегратора.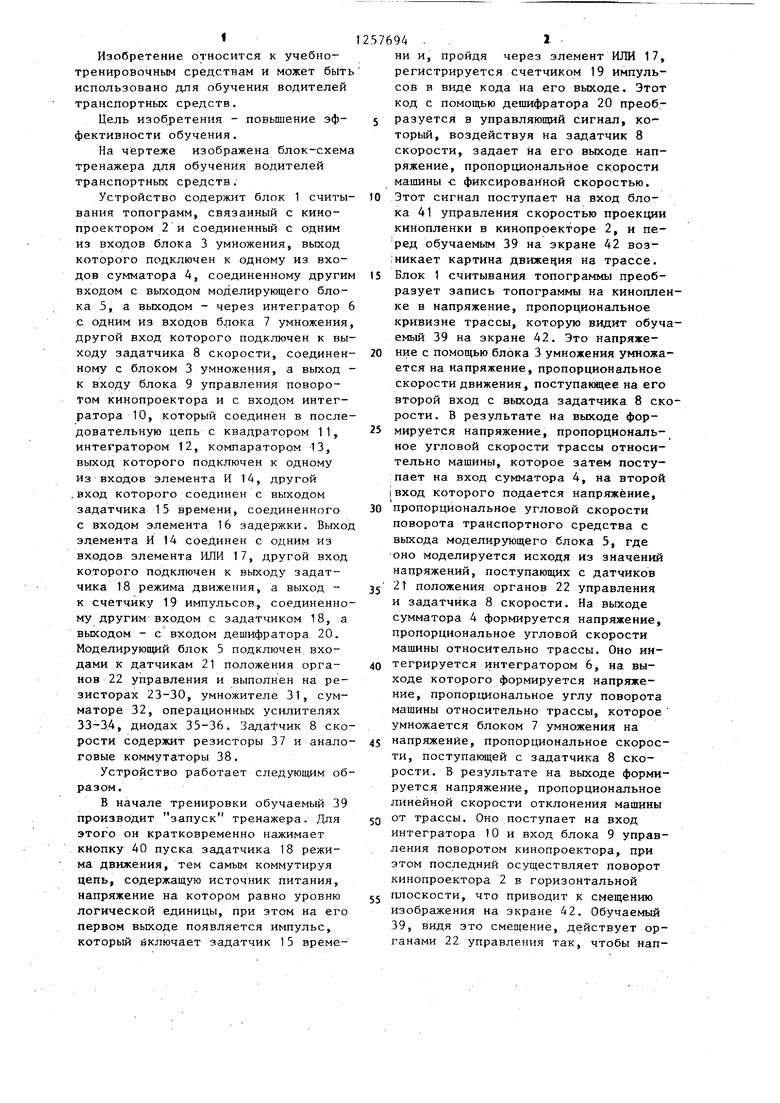
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для обучения водителей транспортных средств | 1980 |
|
SU985818A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU877472A2 |
| Следящая система поворота проектора кинотренажера | 1984 |
|
SU1246052A2 |
| Тренажер водителя транспортного средства | 1980 |
|
SU930339A1 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU1029144A2 |
| Устройство для управления кинотренажером | 1984 |
|
SU1275515A1 |
| Следящая система поворота проектора кинотренажера | 1978 |
|
SU729551A2 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU960724A2 |
| Устройство для моделирования колебаний гусеничных машин | 1980 |
|
SU959097A2 |
Изобретение относится к учебно- тренировочным средствам и может быть использовано для обучения водителей трансяортных средств. Цель изобретения - повышение эффективности обучения. Блок 1 считывания топограмм связан с кинопроектором 2 и соединен с одним из входов блока 3 умножения, выход которого подключен к одному 37 37 37 из входов сумматора 4. Выход элемента И 14 соединен с одним из входов элемента ИЛИ 17, другой вход которого подключен к выходу задатчика 18 режима движения, а выход - к счетчику 19 импульсов. Моделирующий блок 5 подключен входами к датчикам 21 положения органов 22 управления. Датчик 8 скорости содержит резисторы 37 и аналоговые коммутаторы 38. В начале тренировки обучаемый производит запуск тренажера, для этого он кратковременно нажимает кнопку пуска 40 задатчика 18 режима движения, тем самым коммутируя цепь, содержащую источник питания,,напряжение на котором равно уровню логической единицы . 1 ил. & (/)
| Тренажер для обучения водителей транспортных средств | 1980 |
|
SU985818A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
