2. Устройство по n.i, о т л и ч ающееся тем, что формирователь заднего фронта сигнала содержит инвертор, усилительный транзистор, операционный усилитель, накопительный ко,нденсатор, три ограничительных резистора и выпрямительный диод, анод которого является первым входом формирователя, катод соединен с входом инвертора, эмиттером усилительного транзистора и через первый ограничительный резистор - с неинвертирующим входом операционного усилителя и
выводом накопительного конденсатора, другой вывод которого соединен с шиной нулевого потенциала, инвертирующий вход операционного усилителя через второй ограничительный резистор соединен с выходом операционного усилителя и коллектором усилительного транзистора, база которого соединена с -выводом третьего ограничительного резистора, другой выв.од которого является вторым входом формирователя, выходом которого является выход инвертора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделированияКОлЕбАНий гуСЕНичНыХ МАшиН | 1979 |
|
SU842865A1 |
| Устройство для моделирования колебаний гусеничных машин | 1980 |
|
SU959097A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1982 |
|
SU1083207A2 |
| Устройство для моделирования динамикидВижЕНия гуСЕНичНОй МАшиНы | 1979 |
|
SU851426A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU907560A1 |
| Устройство для моделирования колебаний гусеничной машины | 1985 |
|
SU1583943A1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297048C1 |
1. yCTPOaCfiBO ДЛЯ МОДЕЛИРОВАНИЯ КОЛБВАНИЙ ГУСЕНИЧНЫХ МАШИН ПО авт.св. 842865, о тли ч а ющ е е с я тем, что, с целью повьлиения точности моделирования колебаний гусеничной машины за счет имитации ударных перегрузок подвески, оно дополнительно содержит сумматор, первый и второй входы которого соответственно соединены с выходом блоi ка задания линейной скорости и шиной постоянного напряжения, а выход сумматора соединен с вторым входом (формирователя заднего фронта сигнала. СО N9 сс со ф о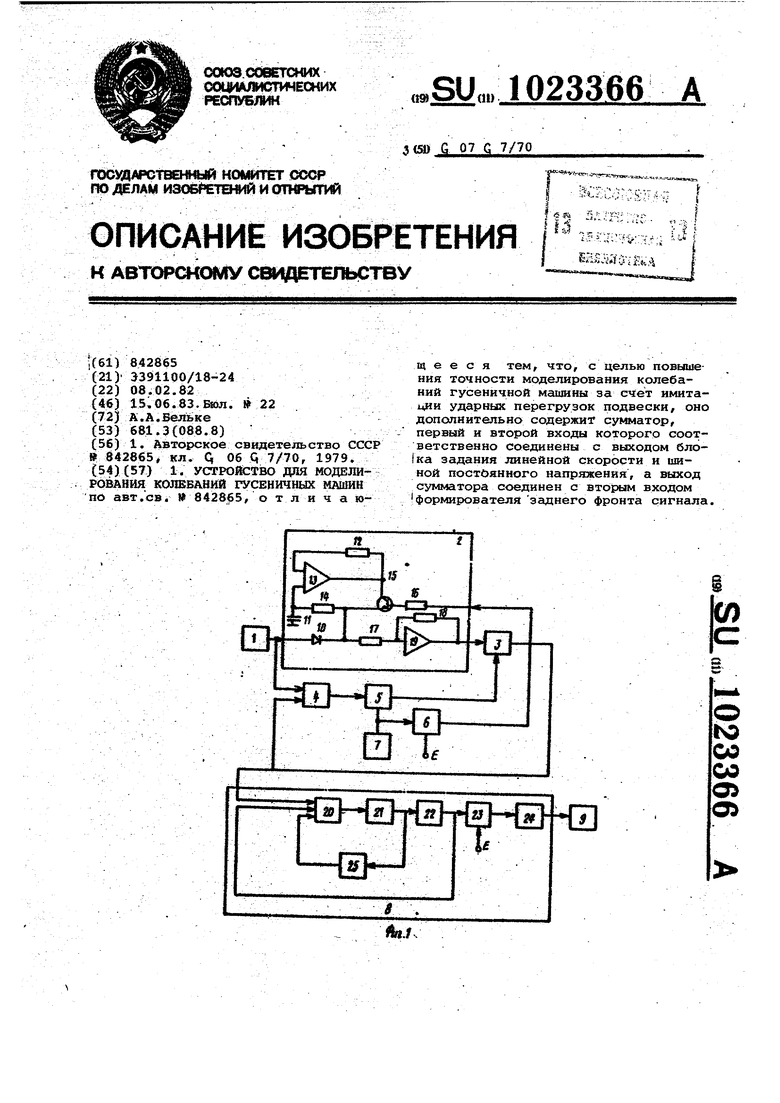
Изобретение относится к аналоговычислительной технике, может быть использовано в тренажерах для обуче ния водителей гусеничных машин, в исследовательских стендах. По основному авт.св. № В42865 известно устройство для моделирования колебаний гусеничных машин, содержащее датчик угла наклона местности, выход которого через формиро тель заднего фронта сигнала подключен к первому входу интегратора, блок задания линейной скорости, ине ционное звено, блок умножения и бло моделирования подвески гусеничной машины, выход которого соединен с исполнительным механизмом, а вход блока моделирования подвески гусе.ничной машины соединен с первым вх дом инерционного звена и подключен к выходу интегратора, второй .вход которого соединен с выходом блока умножения, входы которого соединены с выходами блока задания линейной скорости и инерционного звена, второй вход которого подключен к выходу датчика угла наклона местности. В этом устройстве блок моделирования подвески гусеничной машины содержит источник питания, инверторы, сумматоры и интеграторы, причем первый вход первого сумматора является входом блока, выход первого сумматора через первый интегратор подключен к входам второго интегратора и первого инвертора, выход которого соединен с вторым входом первого сумматора, третий вход кото рого подключен к выходу второго интегратора, связанному с первым входе второго сумматора, второй вход кото рого соединен с выходом источника питания, выход второго сумматора по ключен к входу второго инвертора, выход которого является выходом бло ка i . Однако при формировании заднего фронта сигнала не учитывается вынос центра тяжести гусеничной машины в зависимости от скорости. Вследствие этого в реальных условиях при движении на высоких скоростях могут возникнуть значительные ударные перегрузки в подвеске ГМ, которые отрицательно сказываются на состоянии водителя и могут привести даже к травмам последнего, а также к поломкдм ходовой части. В известном устройстве также ударные перегрузки не мoдeJ; иpyютcя. При использовании данного устройства в тренажере обучаемый водитель не испытывает воздействия данного фактора и не получает навыков, необходимых для исключения воздействия ударных перегрузок. Такие навыки являются довольно сложными и определяются сложными действиями, заключакяцимися в умении так снизить скорость машины, чтобы ее передняя часть плавно опускалась. Такое управление может осуществить водитель, хорошо, чувствующий машину. Целью изобретения является повышение тоиности моделирования колебаний гусеничной машины за счет имитации ударных перегрузок подвески. Поставленная цель достигается тем, что в устройство для моделирования колебаний гусеничных машин дополнительно введен сумматор, первый и второй выходы которого соответственно Соединены с выходом блока задания линейной скорости и шиной постоянного напряжения, а выход сумматора соединен со вторым входом формирователя заднего фронта сигнала. Кроме того, формирователь заднего фронта сигнала содержит инвертор, Ьсилительный транзистор, операционный усилитель, накопительный конденсатор, три ограничительных резистора, выпрямительный диод, анод которого является первым входом формирователя, катод соединен со входе инвертора,
с эмиттером усилительного транзисто- . ра и через первый ограничительный резистор соединен с неинд,ертирующиМ : входом операционного усилителя и выводом накопительного конденсатора, другой вывод которого соединен с ши- 5 ной нулевого потенциала, инвертирующий вход операционного усилителя через второй ограничительный резистор соединен с выходом операционного . усилителя и коллектором усилительного 10 транзистора, база которого соединена с выходе третьего ограничительного резистора, другой вывод которого является входом формирователя, выходс которого является выход инвер-ъс тора.
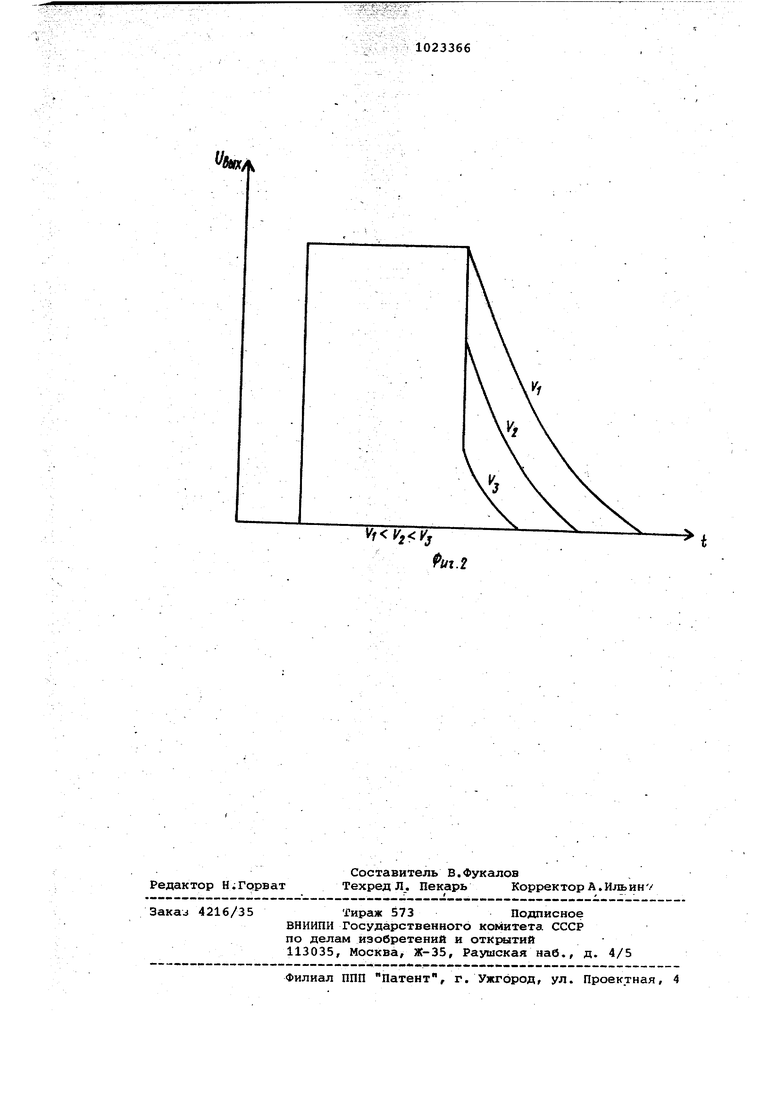
На фиг.1 изображена функциональная схема устройства; на фиг.2 - форма сигнала на выходе формирователя заднего фронта сигнала в зависимости от моделируемой скорости.20
Устройство содержит соединенные датчик угла наклона местности 1, формирователь 2 заднего фронта сигнала, интегратор 3, инерционное звено 4, блок 5 умножения, сумматор 6, блок 7 25 задания линейной скорости, блок 8 моделирования подвески, исполнительный механизм 9.
.Фо1 ирователь заднего фронта сигнала содержит выпрямительный диод 10, 30 накопительный конденсатор 11, второй ограничительный резистор 12, операционный усилитель 13, первый ограничительный резистор 14, усилительный транзистор 15, третий ограничи- 35 тельный резистор 16 и инвертор, сое-, тоящий из резисторов- 17, 18 и операциойного усилителя 19.
Блок 8 моделирования подвески содержит последовательно соединенные сумматор 20, интегратор 21, интег- ратор 22, сумматор 23 и инвертор 24. Выходы интеграторов 21 к 22 соединены соответственно через инвертор 25 и непосредственно с первым и вторым входами сумматора 20, третий вход ко-45 торого является входом блока, второй вход сумматора 23 соединен с источни-г КС питания, а выход инвертора 24 является выходом блока.
, Устройство работает следующим об- SQ разом.
В начальном положении с выхода датчика 1 снимается положительное напряжение Ujt , пропорциональное углу наклона местности, и подается на блоки 2 и 4. Выходное напряжение U интегратора 3 с ограничиваемым уровнем пропорционально углу наклона неподреесоренной части мгилины, равно U(, но противоположно ему по знаку. В этом у случае воспроизводится режим, 0 маиина движется по местности с постоянным углом наклона опорной поверхности гусениц.
Поскольку U(- U| напряжение, на втором входе блока 5 умножения равно 65.
нулю. На первый вход этого блока подается положительное напряжение U пропорциональное скорости прямолиненого движения с блока 7. При этом на выходе блока 5 напряжение равно нулю.
При моделировании изменения угла наклона неподрессоренной части машины при увеличении угла наклона местности на и об на выходе датчика 1 происходит .увеличение напряжения на величину А U , т.е. общее выходное напряжение становится равным Ujj 4- Ь Uj. Последнее поступает на один из входов инерционного звена 4 и на вход формирователя 2, через который оно проходит без изменения по величине и, проинвертировавшись по знаку, поступает на управляющий вход интегратора 3. В результате этого уровень ограничения заряда интегратора 3 увеличивается на величину и U и становится равным ot Л ot- первый момент времени напряжение на выходе интегратора -и ц i и,. Оно поступает на второй вход инерционного звена 4, на выходе которого появляется напряжение - iUj Постоянная времени инерционного звена 4 .ыбрана так, чтобы величина - U( сохранялась весь период заряда интегратора 3. Напряжение-й помо-щью блока 5 умножается на напря|жение и) , в результате чего на выходе блока 5 появляется положительное напряжение ЬU «с Ц , которое поступает на вход интегратора 3 и заряжает его до напряжения -(Ugt + bUjt). Время заряда интегратора 3, т.е. время въезда опорной поверхности гусениц на угол U ot , пропорционально напряжению Uv
Для моделирования изменения угла наклона неподрессоренной части гусеничной машины при уменьшении угла наклона местности используется упрощенная апроксимация возникновения ударных воздействий непоДрессоренной части о грунт при различных скоростях. Такая апроксимация показана на. фиг.2 в виде изменения формы прямоугольного импульса на выходе формирователя 2 в зависимости от напряжения Up .
В этом случае устройство работает следующим образом.
j При уменьшении угла наклона местности на величину &о6 напряжение на выходе датчика 1 становится равным & Uj(,. Это напряжение поступает на вход формирователя 2 и вход инер,ционного звена 4. Формирователь 2 представляет собой интегрирующую цепочку, на входе которой стоит выпрямительный элемент 10. В качестве конденсатора этой цепочки используется умно}1а1тёль емкости, состоящий из элементов 11-15. Таким образом получается, что при увеличении сигнала на величину utJ,4 конденсатор заряжается практически мгновенно, так как выходное coпpo тивление датчика 1 и прямое сопротив ление выпрямительного диода незначительны. При уменьшении же напряжения через фо1 1ирователь 2 заднего фронта сигнала iUj разряд конденсатора осуществляется через резистор 17 инвертора, так как в этом случае выпрямительный диод 10 включен в обратнс направлении. Таким образом, время разряда, в первом приближении, определяется произ.ведением CR, где С - емкость ими с помощыр умножителя .емтируемого .. , кости конденсатора и равна где { из сгопротивление перехода кал лектор-эмиттер транзистора 15. Если рассматривать Яцэ как постоянное сопротивление, то умножение емкости осуществляется за счет увеличения сдвига фазы конденсатора 11. Если бы сопротивление изменялось, то форма заднего фронта сигнала соответствовала бы Vi О, т.е. скорости,, которая чуть больше . нуля. В этом случае транзистор 15 по ностью открыт напряжением, поступающим через резистор 16. Сопротивление полностью открытого транзистора мало и почти не зависит от напряжения коллектор-эмиттер, т.е. в случае имитации малой скорости движения емкость имитируемого KOH денсатора наибольшая. При уменьшении напряжения на рези торе 16 сопротивление перехода коллектор-эмиттер увеличивается. Однако в первый момент, когда разность потенциалов между коллектором и эмит тером равна О, сопротивление .го перехода очень большое. Следовательно, имитируемая емкос мала и поэтому в начале заднего фро та происходит скачок до того, как появится разность потенциалов между коллекторе и имиттером. Чем меньш напряжение на базе транзистора 15, :тем больше скачок заднего фрон.та. Чтобы обеспечить зависимость на Пряжения на базе от скорости, в устройство введен сумматор 6, на один рход которого подается напряжение от источника питания, причем это напряжеиие пропорционально максимально воз можной скорости движения машины. На другой вход сумматора 6 подается напряжение, пропорциональное линейной скорости движения машивд. Таким образом, на выходе сумматор имеется напряжение , которое и подается через резистор 16 на баэу- транзистора 15. Так как время опускания передней Части маЬшны обычно меньше, чем время подъема, то при моделировании изменения угла наклона неподрессоренной части при уменьшении угла наклона влияние напряжения U ,° выхода блока умножения 5 на разряд итегратора 3 мало и поэтому в данном случае не учитывается. Гусеничная машина состоит из неподрессоренной и подрессоренной частей, соединенных между собой системой подвески.Уравнение угловых колебаний подрессоренной части гусеничной машины имеет вид &- pg4kJ0 A, угол наклона подрессоренной части; коэффициент затухания; баний подрессоренной части; внешнее воздействие. . Это уравнение, где переменной является напряжение U Q , пропорциональное углу наклона подрессоренной части, а внешним воздействием напряжение ли(у,имеет вид Ug + PUg/KgUe uUq,. Решается это уравнение с помощью блока 8 следующим образом. Сумматор 20 производит сложение напряжений U§ -Ue, -bU с учетом коэффициентов Р, Kg . На выходе сумматора 20 возникает напряжение Ug пропорциональное угловому ускорению- подрессоренной части. Это интегрируется с помощью интегратора 21, на выходе которого формируется напряжение - UQ , которое инвертируется инвертором 25 и подается, на вход сумматора 20. Напряжение Ug с выхода интегратора 21 интегрируется с помощью интегратора 22 в результате чего на выходе последнего появляется напряжение U , пропорциональное углу наклона подрессоренной части машины, которое также подается на один из входов сумматора 20 И сумматора 23. В нем оно суммируется с напряжением источника питания, пропорциональным значению угла, соответствующего горизонтальному положению подрессоренной части. Напряжение }, поступающее с сумматора 23, через инвертор 24 поCTjniaeT на исполнительный механизм 9. Таким образом,данное устройство поз3° ® с достаточно высокой точностью моделировать колебания гусеничной машиHciT«. , Применение данного устройства в тренажере позволяет прививать навыки вождения гусеничной машины -по местности со йложнъал рельефсж. Это, в свою очередь, приводит к эконсилии моторесурса, горюче-смазочных матери- алов, а также позволяет предотвратить поломки машин и травлы, получаемые при неправильном управлении. ,.
ftwA
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР Я| 6428651 кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
