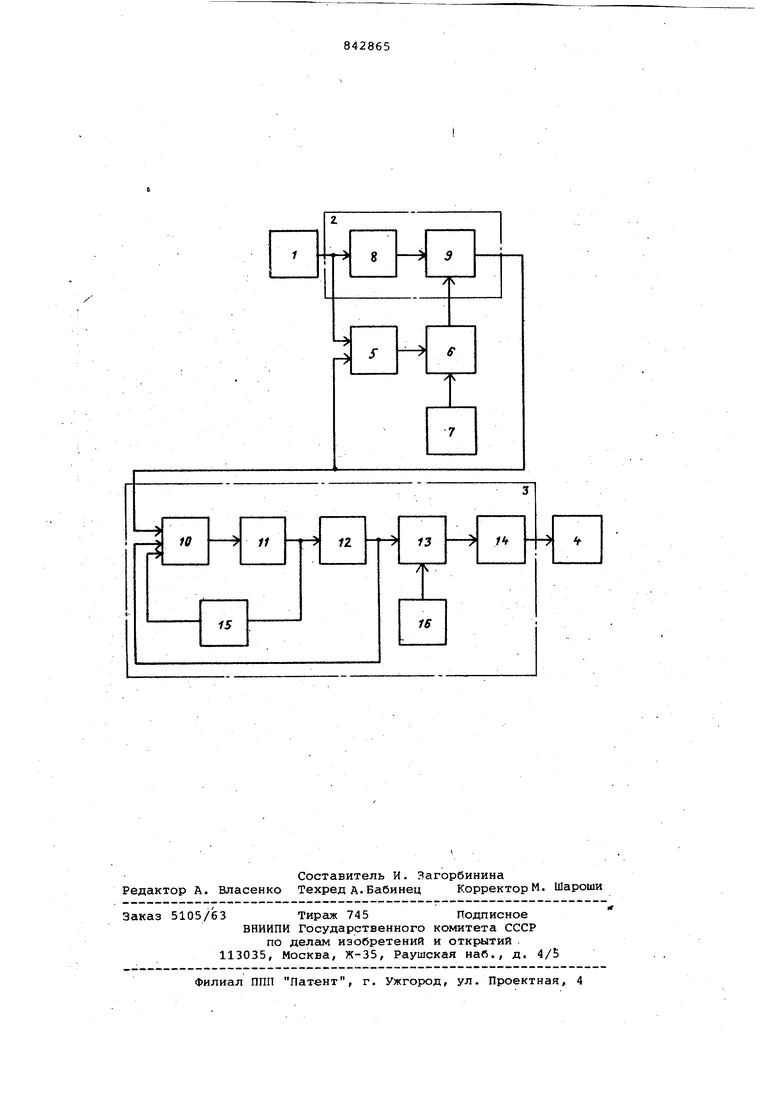
Цель изобретения - повышение точности моделирования колебаний. Поставленная цель достигается тем что в устройство для моделирования колебаний гусеничной машины, содерЖсццее датчик угла наклона местности, выход которого через формирователь заднего фронта сигнала подключен к первому входу интегратора, блок задания линейной скорости и ис полнительный механизм, введены инердионное звено блок умножения и блок моделирования подвески гусеничной МсШ1ины, выход которого соединен с исполнительным механизмом, а вход блока мо;п1елирования подвески гусени ной машины связан с первым входом инерционного звена и подключен к вы ходу интегратора, второй вход которого соединен с выходом блока умножения, входы которого соединены соответственно с выходами блока задан линейной скорости и инерционного звена, второй вход которого подключ к выходу датчика угла наклона местн ти. Кроме того, блок моделирования подвески гусеничной машины содержит источник питания, инвертор, суммато ры и интеграторы, причем первый вхо первого- сумматора является входом блока, выход первого сумматора чере первый ин;тегратор подключен ко входам второго интегратора и первого инвертора, выход которого соединен со вторым входом первого сумматора, третий вход которого подключен к вы ходу второго интегратора, связанном с первым входом второго сумматора, второй вход которого соединен с выходом источника питания, выход второго сумматора подключен ко входу . второго инвертора, выход которого является выходом блока. На чертеже представлено устройство для моделирования колебаний гу ничной машины, блок-схема. Устройство содержит последовательно соединенные датчики 1 угла наклона местности, блок 2 формирования местности, блок 3 моделирования подвески гусеничной машины, исполнительный механизм 4 (электрогидропривод), инерционное звено 5, блок б, умножения и блок 7 задания линейной скорости. Блок 2 формирова ния местности состоит из.формирова;теля -8 заднего фронта сигнала и ,интегратора 9.. Вjсостав блока 3 входят сумматор 10, Интеграторы 11, 12, сумматор 13 инверторы 14, 15 и источник 16 питания . Устройство работает следующим образом. В начальном положении с выхода датчика 1 снимается напряжение и пропорциональное углу наклона местности, и подается на входы звена 5 и блока 2, Выходное напряжение licf интегратора 9 с ограничиваемым уровнем, пропорциональные углу наклона неподрессоренной части машины, равно напряжению и, т.е. в этом случае воспроизводится режим, когда машина движется по местности с постоянным углом наклона опорной поверхности гусениц. Поскольку напряжение и ( и, напряжение на первом входе блока 6 равно нулю, на второй вход этого блока подается напряжение, пропорциональное скорости прямолинейного . движения с блока 7. При этом на выходе блока 6 Нс1пряжение равно нулю. . При моделировании изменения угла наклона неподрессореннои части гусеничной машины при увеличении угла наклона местности на 4оС на выходе датчика 1 происходит увеличение напряжения на величину лид, т.е. общее выходное напряжение становится равным ир(, +л и. Последнее поступает на один из входов звена 5 и на вход формирователя 8, через который оно проходит без изменений и поступает на управляющий вход интегратора 9, так как увеличивает уровень ограничения заряда интегратора до величины и, + + и UgL. Б первый момент времени напряжение на выходе интегратора 9 равно U If u. Оно поступает на второй вход звена 5 с противоположныл знаком. На выходе звена 5 появляется напряжение ли(X, которое умножается на напряжение uy, пропорциональное скорости прямолинейного движения гусеничной машины, напряжение и поступает на вход интегратора 9 и заряжает его до уровня ограничения . При возрастаНИИ напряжения на выходе интегратора 9 уменьшается разность напряжений ( + AUocJ и uц, Напряжение и через блок 3 поступает на исполнительный механизм 4, который поднимает кабину тренажера на угол, соответствующий напряжению U(. ТакимОбразом моделируется изменение угла неподрессоренной части гусеничной машины при движении на подъем. При моделировании изменения угла наклона неподрессоренной части гусеничной машины при уменьшении угла наклона на / oL на выходе датчика 1 происходит уменьшение напряжения на величину flU(ji,, т.е. общее выходное напряжение становится равным ЦзС-ди. Это напряжение поступает на один вход звена 5, на другой вход которого поступает напряжение с выхода интегратора 9, на котором в первый момент времени имеется напряжение U(., в результате на выходе звена 5 появляется нaпpяжeн e и, причем знак его противоположен знаку ид при моделировании движения на подъем. Напряжение ид умножается на напряжение u в блоке 6 и напряжение, равное произведению Uy. идее поступает на вход интегратора 9 и рг эряжает его до тех пор, пока его выходное напряжение не станет равным ил, . этом случае напряжение на выходе звена 5 и блока 6 станет равным нулю. Напряжение Uy, пропорциональное скорости прямолинейного движения гусеничной машины, задается блоком 7. Это напряжение поступа;ет на один из входов блока 6 умножения. Чем меньше Uy, тем меньше произв.едение Uy-Uj c, следовательно, медленнее изменяется напряжение и на выходе интегратора 9. Чем больше Uy, тем больше произведение напряжений и. , следовательно, быстрее изменение напряжения и i на выход интегратора 9. Это значит, что при увеличении скорости движения машины при движении по местности с изменяющимися углами профиля будет увеличиваться скорость изменения угла неподрессоренной части гусеничной машины в соответствии с этим профилем. При постоянной скорости на переменных углах время въезда на эти углы будет оставаться постоянным, т,.е. при увеличении угла будет увеличиваться и произведение , в то же время возрастет напряжение ограничения интегратора 9, т.е. возрастет угловая скорость поворота неподрессоренной части при неизменной линейной скорости.
Гусеничная машина состоит ИЭ М6подрессоренной и подрессоренных частей, соединенных между системой под весом. Уравнение подвески гусеничной машины запишется в виде
Q + Р + К,Ч А, где «/ - угол наклона подрессоренной
части;
Р дикримент затухания;
Nчастота собственных колебаНИИ подрессоренной части;
А внешнее воздействие. С помощью сумматора 10 производится сложение напряжений, пропорционалных РЧ, А. Внешним воздействие А в данном случае является напряжение U If, пропорциональное углу наклона подрессоренной части. На выходе сумматора возникает напряжение, пропорциональное угловому ускорению подрессоренной части 4. Это напряжение интегрируется с помощью интегратора 11 и через инвертор 15 подается на вход сумматора 10. Напряжение с выхода интегратора 11, пропорциональное угловой скорости колебаний подрессоренной части, интегрируется с помощью интегратора 12, в результате чего на его выходе появляется напряжение, пропорциональное углу наклона подрессоренной части,которое так же подается на один из входов сумматора 10 и на сумматор 13, в котором суммируется с напряжением источника 16 питания, пропорциональным значению угла, соответствующего горизонтальному положению подрессоренной, части. Напряжение, поступающее-с выхода сумматора 13, через инвертор 14 поступает на исполнительный механизм 4.,
Рассматриваемое устройство по сравнению с известным позволяет более точно моделировать колебания
О гусеничной машины, что, в свою очередь , при использовании его в тре1нажерах водителей гусеничных машин, повышает качество и снижает сроки обучения водителей.
5
Формула изобретения ; 1. Устройство для моделирования колебаний гусеничных машин, содержащее датчик угла наклона местности, выход которого через формирователь
0 заднего фронта сигнала подключен к первому входу интегра ора, блок задания линейной скорости и исполнительный механизм, отличающееся тем, что, с целью повышения точности, в него введены инер5ционное звено, блок умножения и блок моделирования подвески гусеничной ма шины, выход которого.соединен с исполнительным механизмом, а вход блока , моделирования подвески Гусеничной ма0шины связан с первым входом инерционного звена и подключен к выходу интегратора, второй вход которого соединен с выходом блока умножения, входы которого соединены соответ5 )ственно с выходами блока задания ли нейной скорости и инерционного -звена, второй вход которого подключен к выходу датчика угла наклона местности. :
2. Устройство ПОП.1, отли0чающееся тем, что блок моделирования подвески гусеничной машины содержит источник питания, инверторы, суммато{ял и интеграторы, причем первьш вход первого сумматора является входом блока, выход первого
5 сумматора через первый интегратор подключен ко входам второго интегратора и первого инвертора, выход которого соединен со вторым входом первого сумматора, третий вход которо0го подключен к выходу второго интегратора, связанному с первым входом второго сумматора, второй вход которого соединен с выходом источника питания, выход второгосумматора
5 подключен ко входу второго инвертора, выход которого является ВЕЛХОдбм блока.
Источники информации, принятые во внимание при экспертизе 1. Рымаренко А, Г. и др. Техни0ческие средства интенсификации обучения вождению, Изд-во ВАВТВ, 1970.86.
2. Изделие ТТВ-1/155. Техническое описание 51.00.00,00.00.000 ТО, ;с.45-45 (прототип).
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования колебаний гусеничных машин | 1980 |
|
SU959097A2 |
| Устройство для моделирования колебаний гусеничных машин | 1982 |
|
SU1023366A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU907560A1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1982 |
|
SU1083207A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| Устройство для моделирования колебаний гусеничной машины | 1985 |
|
SU1583943A1 |
| Устройство для моделирования динамикидВижЕНия гуСЕНичНОй МАшиНы | 1979 |
|
SU851426A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1981 |
|
SU1003115A1 |