Фиг.1
Изобретение относится к телепи- 31ГОННОЙ автоматике и может исполь- зеваться в многоканальных дискриминаторах для вычисления сигнала ошиб- g ки при определении координат множества подвижных малоразмерных объектов на неравномерном фоне.
Цель изобретения - повышение точности определения координатной ошибки ю при измерении координат множества объектов при наличии фоновой составляющей в видеосигнале.
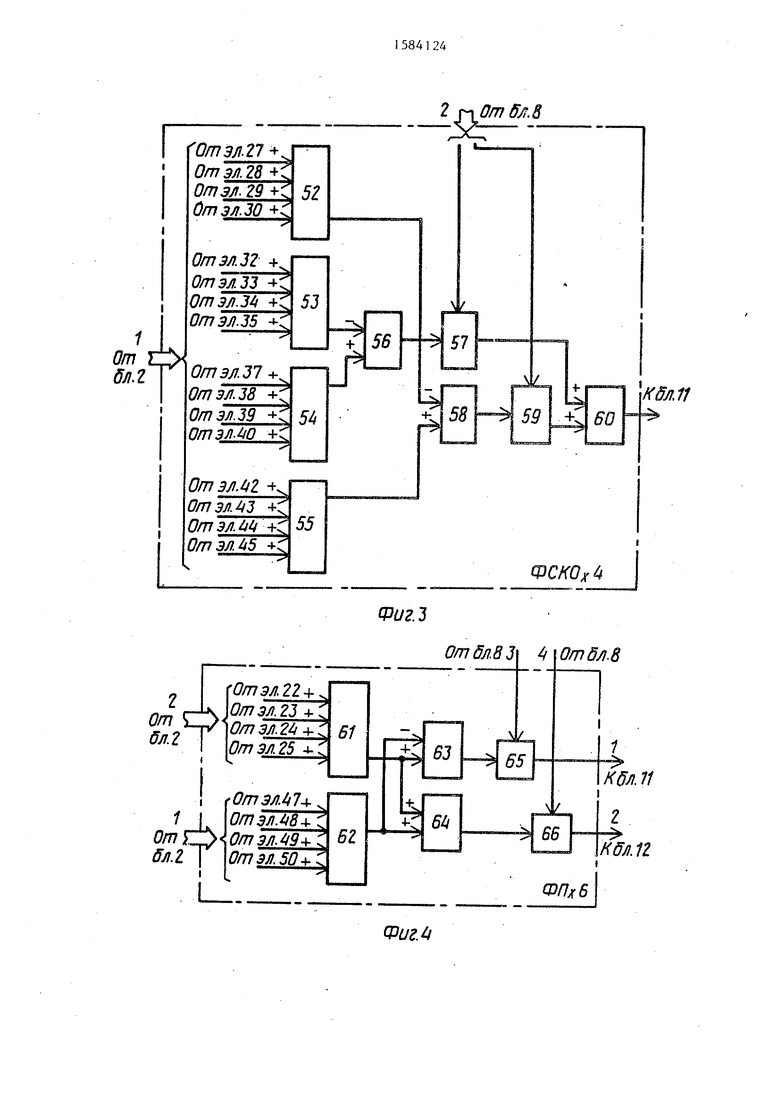
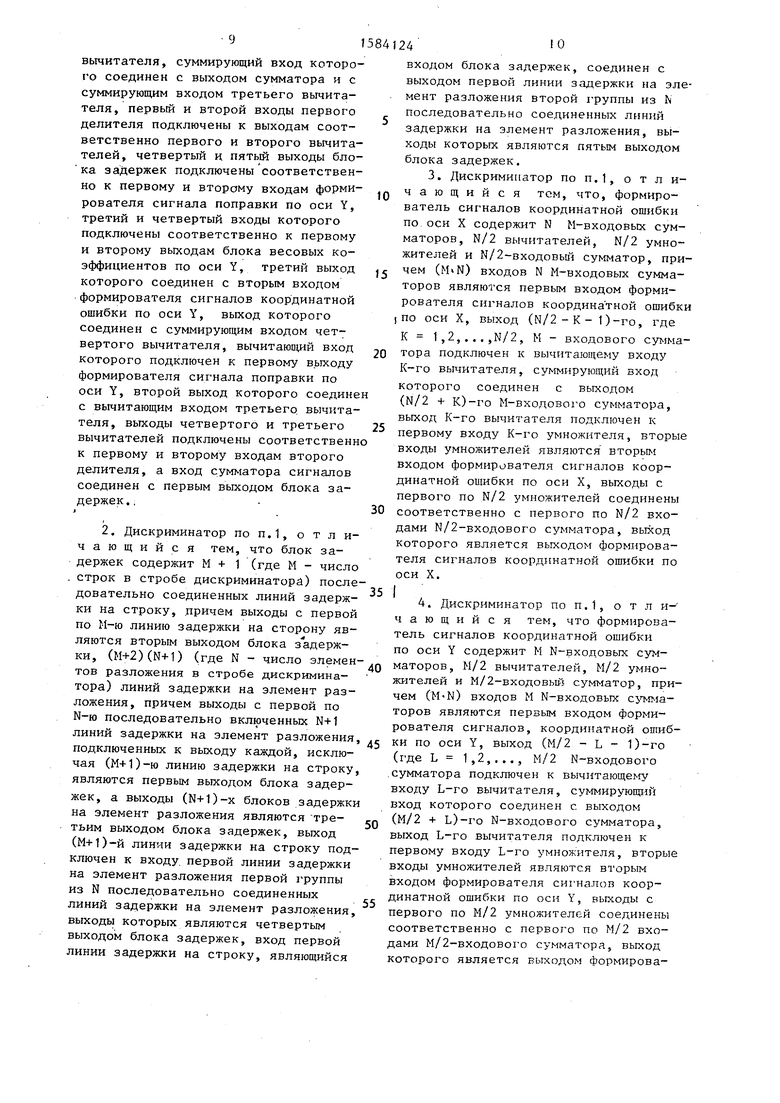
На фиг. 1 представлена структур- ная электрическая схема телевизионно- 15 го координатного дискриминатора; на фиг. 2 - структурная электрическая схема блока задержек для сканирующей многоэлементной апертуры, содержащей М 4 строки и N 4 эле- 20 мента разложения; на фиг. 3 - структурная электрическая схема формирователя сигналов координатной ошибки по оси X для сканирующей многоэлементной апертуры, содержащей М 4 стро- 25 ки и N 4 элемента разложения (для М N 4 формирователь сигналов координатной ошибки по оси Y имеет тождественную структурную электрическую схему); на фиг. 4 - структур- -JQ ная электрическая схема формирователя поправки по оси X для сканирующей многоэлементной апертуры, содержащей М 4 строки и N 4 элемента разложения (для М N 4 формирователь $ поправки по оси Y имеет тождественную структурную электрическую схему); на фиг. 5 - форма сканирующей многоэлементной апертуры, содержащей М 4 строки и N 4 элемента разложения. 40
Телевизионный координатный дискриминатор (фиг. 1) содержит телевизионный датчик 1, блок 2 задержек, синхронизатор 3, формирователь 4 сигналов координатной ошибки по оси X 45 (ФСКОХ), формирователь 5 сигналов координатной ошибки по оси Y (ФСКОУ), формирователь 6 сигнала поправки по оси X (ФПХ) формирователь 7 сигнала поправки по оси Y (ФПУ), блок 8 , весовых коэффициентов по оси X, блок 9 весовых коэффициентов по оси Y,
сумматор 10 сигналов, первый 11, второй 12, третий 13 и четвертый 14 вычитатели, первый 15 и второй 16 делители.
Блок 2 задержек (фиг. 2)содержит первую 17 - пятую 21 линии задержки на строку и первую 22 - тридцатую 51 линии задержки на элемент разложения. Формирователь 4 сигналов координатной ошибки по оси X (фиг. 3) содержит первый 52 - четвертый 55 четырехвхо- довые сумматоры ФСКОХ, первый вычи- татель 56 ФСКОХ, первый умножитель 57 ФСКОХ, второй вычитатель 58 ФСКОХ, второй умножитель 59 ФСКОХ и двух- входовый сумматор 60 ФСКОХ. Формирователь 6 сигнала поправки по оси X (фиг. 4) содержит первый 61 и второй 62 четырехвходовые сумматоры ФПХ, вычитатель 63 ФПХ, двухвходовый сумматор 64 ФПХ, первый 65 и второй 66 умножители ФПХ. Сканирующая многоэлементная апертура 67 (фиг. 5) включает апертуру 67-1, соответствующую стробу M-N элементов разложения ( М N 4), апертуры 67-2 и 67-3, используемые для формирования поправки координатной ошибки по оси X, апертуры 67-4 и 67-5, используемые для формирования поправки координатной ошибки по оси Y.
Телевизионный координатный дискриминатор работает следующим .
В основу работы телевизионного координатного дискриминатора положен алгоритм измерения координатной ошиб- |ки множества объектов по формуле центра масс
/И N
2 -S. s(n,m)f(n) 4 х -S -JiL, (1)
АЛ N
5 S(n,m)
1ТЫ
где S(n,tn) - сигнальная функция;
f(n) - измерительная функция. Для компенсации погрешностей, возникающих при определении .координатной ошибки при наличии фона в видеосигнале, введены поправки в соответствии с которыми выражение (1) принимает вид


| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1986 |
|
SU1443763A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1989 |
|
SU1635881A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ТОЧЕЧНЫХ ОБЪЕКТОВ | 1989 |
|
SU1623537A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| Телевизионный координатный дискриминатор со стробом размером М @ N элементов разложения | 1979 |
|
SU987853A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| Телевизионный координатный дискриминатор | 1988 |
|
SU1700766A1 |
| Устройство цифровой пространственно-временной фильтрации телевизионного сигнала изображения | 1989 |
|
SU1646074A1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |


Изобретение относится к телевизионной автоматике и может использоваться в многоканальных дискриминаторах для вычисления сигнала ошибки при определении координат множества подвижных малоразмерных объектов на неравномерном фоне. Цель изобретения - повышение точности определения координатной ошибки при измерении координат множества объектов при наличии фоновой составляющей в видеосигнале. Видеосигнал с выхода телевизионного датчика 1, управляемого синхронизатором 3, поступает на блок 2 задержек, формирующий многоэлементную апертуру. В формирователях 4 и 5 сигналов координатной ошибки по осям X и Y вырабатываются сигналы рассогласования центра объекта с центром апертуры. Определение координатной ошибки осуществляется на основе формулы вычисления центра масс, в которую вводится поправка на погрешность вычисления, возникающая при наличии фона. В телевизионном координатном дискриминаторе полностью исключается систематическая ошибка, вызванная фоновой составляющей сигнала. 5 з.п. ф-лы, 5 ил.
м км
Ј. S(n,m)f (n) -K,,m) S(0,m)
- «51-JDa. , Г9Ч
- ----- Ј.)
Z. S(n,m) - К, Т S(N+1,m) - S(0,m)J
Ч 1Х,1
где К и К - уравнивающие коэффициенты, зависящие от I размеров М и N сканирующей многоэлементной апертуры.
Видеосигнал с телевизионного датчика 1 поступает на вход блока 2 задержек, на выходе которого одновременно формируется (М +. 2(N + 2) - 4 JQ сигналов измерительного строба (фиг. 5, апертура 67-1) и его ближайшей окресности (фиг. 5, апертуры 67-2, 67-3, 67-4, 67-5). Таким образом, в блоке 2 задержек одновремен- ,5 (для формирователя 7 но формируется 36 сигналов ( для
62 - апертуры 67-3. П лы на выходах суммато мируются на сумматоре в умножителе 66 на ко
Сигнал, соответствую поступает со второго 8 весовых коэффициен вход формирователя 6 ки весовых коэффицие ент определяется из
К N/2
Y К, М/2). Так фо ка знаменателя. Попр выражения (2) рассчи тателе 63 путем вычи полученного на выход из сигнала, полученно сумматора 61. Умножи нормировку поправки определяемый из выраж
случая М N - 4), из которых используется 32. M-N сигналов с первого выхода блока 2 задержки поступают на входы формирователей 4 и 5 сигналов координатной ошибки по оси X и оси Y, а также на сумматор 10 сигналов, где происходит формирование нормирующего сигнала в соответствии со знаменателем выражения (1) путем суммирования всех значений сигнала, принадлежащего сканирующей многоэлментной апертуре (СМА) 67-1 (фиг. 5) размером M N (выходные сигналы элементов 27 - 30, 32 /- 35, 37 - 40, 42 - 45 блока 2 задержек). Формирователь 4 сигналов координатной ошибки по оси X вырабатывает ненормированный сигнал рассогласования центра объекта с центром апертуры в каждый момент времени. Алгоритм работы формирователя 4 соответствует числителю выражения (1). Дискретная весовая функция f(n) прини-
мает значения для равноудаленных от центра апертуры 67-1 (фиг. 5) элементов, равное 0,5; 1,5..., причем размер ее должен быть выражен четным числом элементов. Сигналы, соответствующие значениям данной весовой функции f(n) поступают на второй вход формирователя 4 с третьего выхода
блока 8 весовых коэффициентов по оси X.
Вычитатели 11 и 12 формируют соответственно сигналы числителя и знаменателя выражения (2). Сигналы, снимаемые со второго выхода блока 2 задержек (фиг. 2, выходы элементов 22 - 25) и третьего выхода (фиг. 2, выходы элементов 47 - 50), образуют апертуры 67-2 и 67-3) соответственно (фиг. 5). Сумматор 61 суммирует все сигналы апертуры 67-2, а сумматор
4124
JQ,5 (для формирователя 7
62 - апертуры 67-3. Полученные сигналы на выходах сумматоров 61 и 62 суммируются на сумматоре 64 и умножаются в умножителе 66 на коэффициент Kt.
Сигнал, соответствующий величине К , поступает со второго выхода блока 8 весовых коэффициентов на четвертый вход формирователя 6 сигнала поправки весовых коэффициентов. Коэффициент определяется из соотношения
ователя 7
К N/2
(3)
поправки по оси
(для формирователя 7
Y К, М/2). Так формируется поправка знаменателя. Поправка числителя выражения (2) рассчитывается в вычи- тателе 63 путем вычитания сигнала, полученного на выходе сумматора 62. из сигнала, полученного на выходе сумматора 61. Умножитель 65 производит нормировку поправки на коэффициент, определяемый из выражения
КгМ
h:
f(n)(0)| + | f(N+ 1)|
0
(для формирователя
М , f (m)
(4) 7 поправки по осиY К.
WaJ
IfZor
+ If(N + 1)1
5
0
5
0
5
Ввиду симметричности весовой функции f(n) формируется только положительная ее часть. Для N 4 коэффициент Кг в соответствии с выражением (4) равен единице.
Полученный сигнал поправки с первого выхода формирователя 6 поправки координатной ошибки по оси X поступает на второй (вычитающий) вход вычитателя 11, на первый вход подается сигнал с выхода формирователя 4 сигналов координатной ошибки по оси X. С выхода вычитателя 11 сигнал поступает на первый вход делителя 15 в качестве делимого. Выходной сигнал вычитателя 12 подан на второй вход делителя 15 в качестве делителя.
Таким образом, на выходе делителя 15 получаем текущие оценки координатной ошибки в соответствии с выражением (2).
i
Формирователь 4 сигналов координатной ошибки по оси X для М N 4 (фиг. 3) работает следующим образом.
На сумматоре 52 суммируется столбец М сигналов из N строк телевизион Иого изображения, принадлежащего Јпертуре 67-1 (фиг. 5), сумматор 53 формирует сигнал суммы соседнего Столбца апертуры 67-1. Аналогично 8 сумматорах 54 и 55 суммируются следующие столбцы апертуры 67-1, соответствующей измерительному стробу M«N элементов разложения (). Умноженные на значения весовой функции в умножителях 57 и 59 сигналы поступают в сумматор 60, на выходе Которого получаем ненормированный с|игнал рассогласования центра объекта относительно центра измерительно- г+о строба (апертуры 67-1). Формирователь 7 поправки по оси Y работает Аналогично формирователю 6 поправки По оси X, только на входы четырех- Е|ХОДОВЫХ сумматоров (для М N 4) rto-другому подключены сигналы с первого выхода блока 2 задержки, а имен ц о: сумматор формирователя 5 (аналогичный сумматору 52 формирователя 4) подключен к выходам элементов 27, 32,37, 42 блока 2 задержки, следующий сумматор формирователя 5 (аналогичный сумматору 53 формирователя 4) подключен к выходам элементов 28, 33 38, 43 блока 2 задержки, следующий четырехвходовый сумматор формирователя 5 (аналогичный сумматору 54 формирователя 4) - к выходам элементов 29, 34, 39, 44 блока 2 задержки и четвертый сумматор формирователя 5 (аналогичный сумматору 55 формирователя 4) к выходам элементов 30, 35, 40, 45 блока 2 задержки. Работа формирователя 5 не отличается от работы формирователя 4. Остальные бпоки (9, 13, 14, 16) оценки координатной ошибки по оси Y работают аналогично блокам (8, 11, 12, 15) оценки координатной ошибки по оси X.
Синхронизатор 3 обеспечивает синхронный режим работы во времени разверток телевизионного датчика 1.
При наличии в сигнале постоянного фона оценка координатной ошибки производится известным устройством с тем большей погрешностью, чем больше фон и чем больше размер СМА. Это происходит за счет накопления значений фона знаменателем выражения )(1), что приводит к уменьшению крутизны дискриминационной харяктеристи
0
5
0
5
0
5
0
5
ки и, следовательно, к уменьшению точности оценки координатной ошибки. В случае наличия неравномерного фона, кроме указанной погрешности, добавляется погрешность, связанная с тем, что измерительная функция f(n) дает погрешность тем большую, чем больше неравномерность фона.
В предлагаемом телевизионном координатном дискриминаторе систематическая ошибка, вызванная фоновой составляющей сигнала, сигналов координатной ошибки полностью исключена.
Формула изобрс ения
915841
вычитателя, суммирующий вход которого соединен с выходом сумматора и с суммирующим входом третьего вычитателя, первый и второй входы первого делителя подключены к выходам соответственно первого и второго вычита- телей, четвертый и пятый выходы бло- ка задержек подключены соответственно к первому и второму входам форми- рователя сигнала поправки по оси Y, третий и четвертый входы которого подключены соответственно к первому и второму выходам блока весовых коэффициентов по оси Y, третий выход г которого соединен с вторым входом формирователя сигналов координатной ошибки по оси Y, выход которого соединен с суммирующим входом четвертого вычитателя, вычитающий вход 2п которого подключен к первому выходу формирователя сигнала поправки по оси Y, второй выход которого соединен с вычитающим входом третьего вычитателя, выходы четвертого и третьего 25 вычитателей подключены соответственно к первому и второму входам второго делителя, а вход сумматора сигналов соединен с первым выходом блока задержек..30
40
тов разложения в стробе дискриминатора) линий задержки на элемент разложения, причем выходы с первой по N-ю последовательно включенных N+1 линий задержки на элемент разложения, подключенных к выходу каждой, исключая (М+1)-ю линию задержки на строку, являются первым выходом блока задержек, а выходы (N+1)-x блоков задержки на элемент разложения являются третьим выходом блока задержек, выход (М+1)-й линии задержки на строку подлючен к входу первой линии задержки на элемент разложения первой группы з N последовательно соединенных иний задержки на элемент разложения, ыходы которых являются четвертым ыходом блока задержек, вход первой инии задержки на строку, являющийся
35
50
55
24
10
г п 5 0
...
0
5
0
5
входом блока задержек, соединен с выходом первой линии задержки на элемент разложения второй группы из N последовательно соединенных линий задержки на элемент разложения, выходы которых являются пятым выходом блока задержек.
теля сигналов координатной ошибки по оси Y.
выходы первого и второго умножителей являются соответственно первым и вто
1
0
0
5
рым выходами формирователя поправки по оси X.
j ч, д it
--чм
1№Х
дч/дшо
ivgsi
Ј глсь
67-1
67-5
67-5
Фиг. 5
Редактор И.Горная
Составитель А.Цветков
Техред Л.Олийнык Корректор М.Максимишинец
67-3
/f+Г
о
| Телевизионный координатный дискриминатор со стробом размером М @ N элементов разложения | 1979 |
|
SU987853A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
