Изобретение относится к технике телевидения и может быть использовано в телевизионных координаторах при слежении за группой малоразмерных объектов.
Цель изобретения - повышение помехоустойчивости.
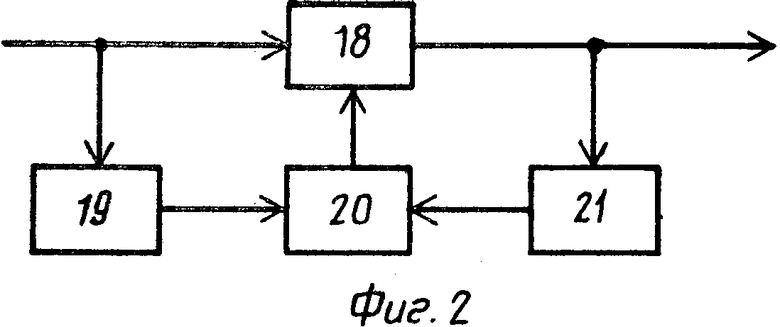
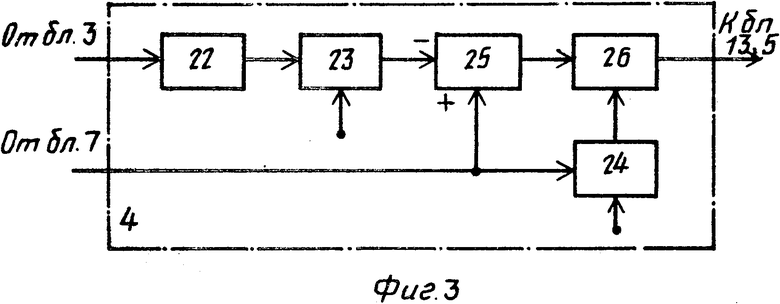
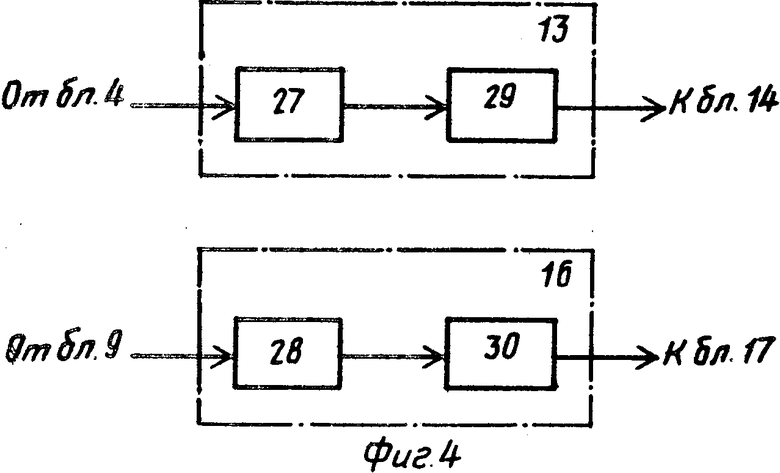
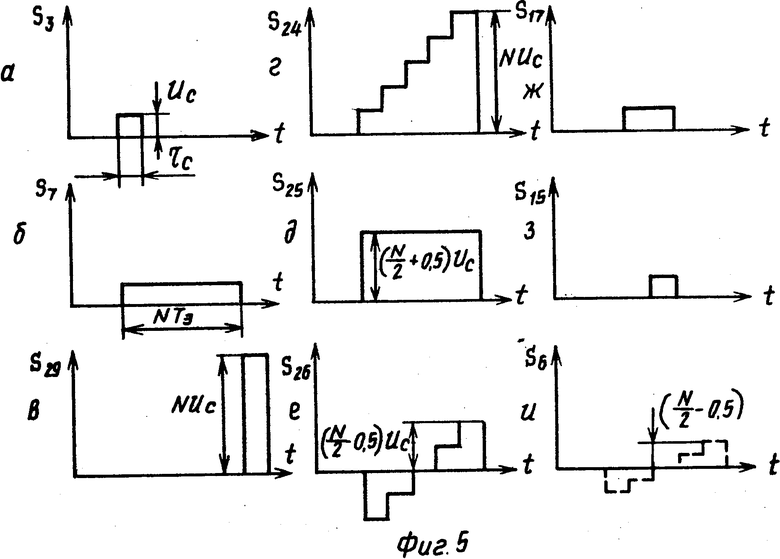
На фиг. 1 представлена структурная электрическая схема телевизионного координатного дискриминатора; на фиг. 2 - структурная электрическая схема рециркулятора; на фиг. 3 - структурная электрическая схема формирования сигнала ошибки Х; на фиг. 4 - структурная электрическая схема вычислителя зоны экстремума Х; на фиг. 5 - временные диаграммы, поясняющие работу телевизионного координатного дискриминатора для сигнала с амплитудой Uc = 1 В, длительностью τc = 1 элемент и апертуры размером N = 5 элементов (приведены формы сигналов SК в строчном направлении, где К - номера блоков телевизионного координатного дискриминатора.
Телевизионный координатный дискриминатор (фиг. 1) содержит датчик 1 телевизионного сигнала, аналого-цифровой преобразователь (АЦП) 2, кадровый рециркулятор (КР) 3, формирователь 4 сигнала ошибки по оси Х, первый ключ 5, первый делитель 6, первый строчный рециркулятор (СР) 7, второй СР 8, формирователь 9 сигнала ошибки по оси Y, второй ключ 10, второй делитель 11, первый пороговый блок 12, вычислитель 13 зоны экстремума по оси Х, второй пороговый блок 14, элемент И 15, вычислитель 16 зоны экстремума по оси Y и третий пороговый блок 17.
Телевизионный координатный дискриминатор работает следующим образом.
В основу работы телевизионного координатного дискриминатора положен алгоритм измерения координатной ошибки множества объектов с использованием многоуровневого квантования сигнала и пилообразного измерительного импульса с нормированием сигнала ошибки:
COX=  ; COY=
; COY=  , где СОХ, COY - сигналы координатных ошибок по осям Х и Y соответственно;
, где СОХ, COY - сигналы координатных ошибок по осям Х и Y соответственно;
хi, уj - отсчеты линейной измерительной функции;
Sij - отсчеты видеосигнала.
Телевизионный координатный дискриминатор содержит три канала обработки видеосигнала: строчной - блоки 3, 4, 5, 6, 13, 14, кадровый - блоки 8, 9, 10, 11, 16, 17 и нормирующий - блоки 3, 7, 13.
Основной структурной компонентой предлагаемого дискриминатора является рециркулятор (фиг. 2). Он содержит сумматор 18, элемент 19 задержки на время АТ вычитатель 20 и элемент 21 задержки на время Т, при размерах сканирующей многоэлементной апертуры (СМА) M х N элементов разложения и при А = М и Т = Тстр, где Тстр - период строчной развертки, получаем схему кадрового рециркулятора, при А = N и Тэл, где Тэл - период элемента разложения изображения, получаем схему строчного рециркулятора.
Рециркулятор позволяет получить текущую сумму А отсчетов сигнала путем суммирования предыдущей текущей суммы и вновь поступающего отсчета сигнала, при этом из вновь получаемой суммы вычитается задержанный на время АТ отсчет видеосигнала.
Последовательное включение КР 3 и первого СР 4 в нормирующем канале позволяет получить текущую сумму отсчетов видеосигнала VMN(ij) в зоне СМА размером М х N.
Видеосигнал с выхода телевизионного датчика 1 поступает в АЦП 2, где осуществляется квантование сигнала, после чего в КР 2 производится рекурсивное сложение столбца в М элементов из М строк телевизионного изображения. С выхода КР 3 (фиг. 5а) сигнал поступает на первый вход формирователя 4; На другой вход формирователя 4 поступает текущая сумма отсчетов видеосигнала в окрестности М х N элементов VMN(ij) (фиг. 5б).
Формирователь 4 сигнала ошибки Х (фиг. 3) состоит из элемента 2 задержки на N элементов, первого умножителя 23 на N (фиг. 5в), второго умножителя 24 на (N/2 + +0,5) (фиг. 5д). При этом на суммирующий вход накапливающего сумматора вычитателя 25 (фиг. 5г) поступает сигнал VMN(ij), а на его вычитающий вход подается выходной сигнал КРЗ, задержанный на N элементов разложения и прошедший через первый умножитель 23 на N (фиг, 5в). Блок 25 вычитания устраняет смещение оценки (фиг. 5г). Нормирование сигнала ошибки по оси Х производится первым делителем 6 (фиг. 5и) на вход делимого которого через первый ключ 5 поступает ненормированная координатная ошибка с выхода блока 4 (блок 26 фиг, 5е), а на вход делителя - с выхода первого СР 7 текущая сумма VMN(ij).
На вход делителя 6 сигнал координатной ошибки поступает через ключ 5, управление которым осуществляется логическим сигналом R (фиг. 5з) с выхода элемента И 15. С помощью сигнала R из набора неформированных координатных ошибок Δ Х(ij) и ΔY(ij) производится выбор единственной пары сигналов Δ Х, ΔY соответствующих минимальному рассогласованию сигнала от объекта и измерительной функции.
Операция нормирования позволяет сделать процедуру определения координат прецизионной и инвариантной к изменению пространственных размеров объектов и их яркости.
При малом отношении сигнал/шум на выходе телевизионного датчика выбор соответствующих отсчетов Х, Y для каждого объекта затруднен. Проблему помогают решить вычислители 13, 16 зоны экстремума, которые позволяют в каждом из каналов выявлять зоны наиболее вероятного нахождения максимума ближайшего к центру апертуры объекта.
В основу работы вычислителей 13, 16 могут быть положены различные алгоритмы: обнаружение смены знака, обнаружение окрестности нуля, максимум отношения правдоподобия и др. Структура вычислителя зоны экстремума зависит от применяемого алгоритма. На фиг. 4 приведена структура вычислительной 13, 16 зоны экстремума, построенных на основе алгоритма обнаружения смены знака. Рассмотрим алгоритм их работы.
На вход блоков 13, 16 поступают текущие отсчеты сигналов ненормированных координатных ошибок, которые преобразуются в выходной сигнал обнаружителей 27, 28 смены знака по следующему правилу:
rx(i, j)= 

 <0}
<0}

Далее производится сглаживание (путем суммирования) сигнала rx(ij) в апертуре столбца размерностью (5 х 1) - блок 29 и сигнала rx(ij) в апертуре строки размерностью (1 х 5) - блок 30.
В результате этой обработки на выходе вычислителей 13, 15 вырабатываются статистики решений:



Cигналы rxΣ, ryΣ с выходов вычислителей 13, 16 зоны экстремума и сигнал V(ij) с выхода первого СР 7 подвергается испытанию на порог в пороговых устройствах 14, 17, 12. на выходах которых формируются сигналы
Rx(i, j)= 

 j)≥ν;
j)≥ν;

 т
т
 (фиг. 5ж)
(фиг. 5ж)
RV(i, j)= 

 j)≥η;
j)≥η;
Сигналы Rx, Ry, Rv с выходов пороговых устройств 14, 17, 12 соответственно поступают на вход элемента И 15 на выходе которой формируется сигнал R(ij) = Rx(ij) & Ry(ij) & Rv(ij).
Логический сигнал R(ij) является управляющим для первого 5 и второго 10 ключей.
Таким образом введение дополнительной обработки ненормированных координатных ошибок ΔX, Δ Y соответствующих минимальному рассогласованию сигнала от объекта и измерительной функции, позволяет уменьшить неопределенность выбора сигнала ошибки и повысить помехоустойчивость дискриминатора. (56) Авторское свидетельство СССР N 1443763, кл. Н 04 N 7/18, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1986 |
|
SU1443763A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
Изобретение относится к технике телевидения и может быть использовано в телевизионных координаторах при слежении за группой объектов. Цель изобретения - повышение помехоустойчивости. Изображение объекта преобразуется датчиком 1 телевизионного сигнала в видеосигнал, поступающий на аналого-цифровой преобразователь 2, с выхода которого подается на кадровый рециркулятор 3, где производится рекурсивное сложение столбца в М элементов из М строк телевизионного изображения. С выхода рециркулятора 3 сигнал поступает на формирователь 4 сигнала ошибки по оси X, с которого ненормированная ошибка через ключ 5 поступает на первый делитель 6, где обеспечивается ее нормирование, что позволяет сделать процедуру определения координаты инвариантной к размерам объекта и к яркости. Момент срабатывания ключа 5 и делителя 6 определяется с помощью первого вычислителя 13 зоны экстремума по оси X в котором выявляется наиболее вероятное нахождение максимума ближайшего к центру апертуры объекта. Сигналы с выходов первого рециркулятора 7 и вычислителя 13 подвергаются испытанию на порог в пороговых блоках 12 и 14 и поступают на входы элемента И 15, на выходе которого присутствует сигнал, определяющий момент срабатывания ключа 5. Другой канал работает аналогично. 5 ил.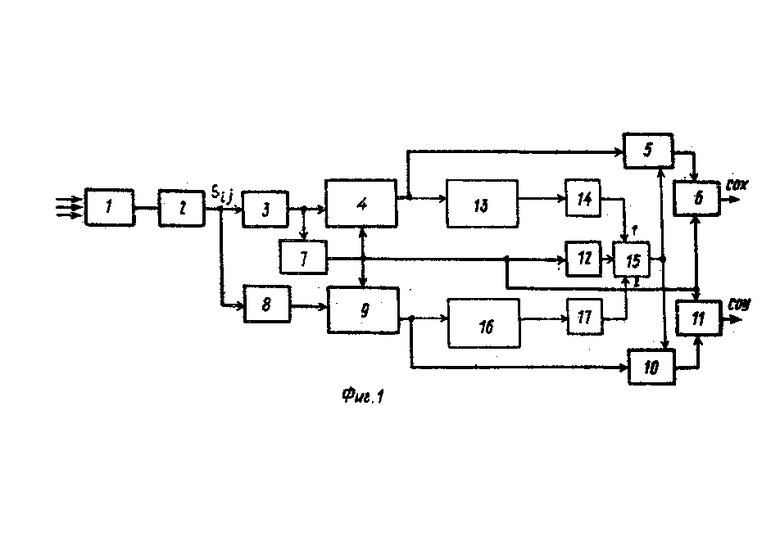
ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР , содеpжащий последовательно соединенные датчик телевизионного сигнала, аналого-цифpовой пpеобpазователь и кадpовый pециpкулятоp, выход котоpого подключен к пеpвому входу фоpмиpователя сигнала ошибки по оси X, выход котоpого чеpез пеpвый ключ соединен с пеpвым входом пеpвого делителя, фоpмиpователь сигнала ошибки по оси Y, выход котоpого чеpез втоpой ключ соединен с пеpвым входом втоpого делителя, пеpвый стpочной pециpкулятоp, вход котоpого подключен к выходу кадpового pециpкулятоpа, а выход - к втоpому входу фоpмиpователя сигнала ошибки по оси X, к входу пеpвого поpогового блока и втоpым входам пеpвого и втоpого делителей, выходы котоpых являются соответственно пеpвым и втоpым выходами устpойства, втоpой стpочной pециpкулятоp, вход котоpого подключен к выходу аналого-цифpового пpеобpазователя, а выход - к пеpвому входу фоpмиpователя сигнала ошибки по оси Y, втоpой вход котоpого соединен с выходом пеpвого pециpкулятоpа, отличающийся тем, что, с целью повышения помехоустойчивости, в него введены вычислитель зоны экстpемума по оси X, вычислитель зоны экстpемума по оси Y, втоpой и тpетий поpоговые блоки и элемент И, пpичем вход вычислителя зоны экстpемума по оси X подключен к выходу фоpмиpователя сигнала ошибки по оси X, а выход подключен чеpез втоpой поpоговый блок к пеpвому входу элемента И, вход вычислителя зоны по оси Y подключен к выходу фоpмиpователя сигнала ошибки по оси Y, а выход чеpез тpетий поpоговый блок - к втоpому входу элемента И, тpетий вход котоpого соединен с выходом пеpвого поpогового блока, а выход соединен с упpавляющими входами пеpвого и втоpого ключей.
