Изобретение относится к сельскохозяйственной технике, а именно к устройствам для раздачи жидких кормов на животноводческих комплексах.
Целью изобретения является повышение точности дозирования.
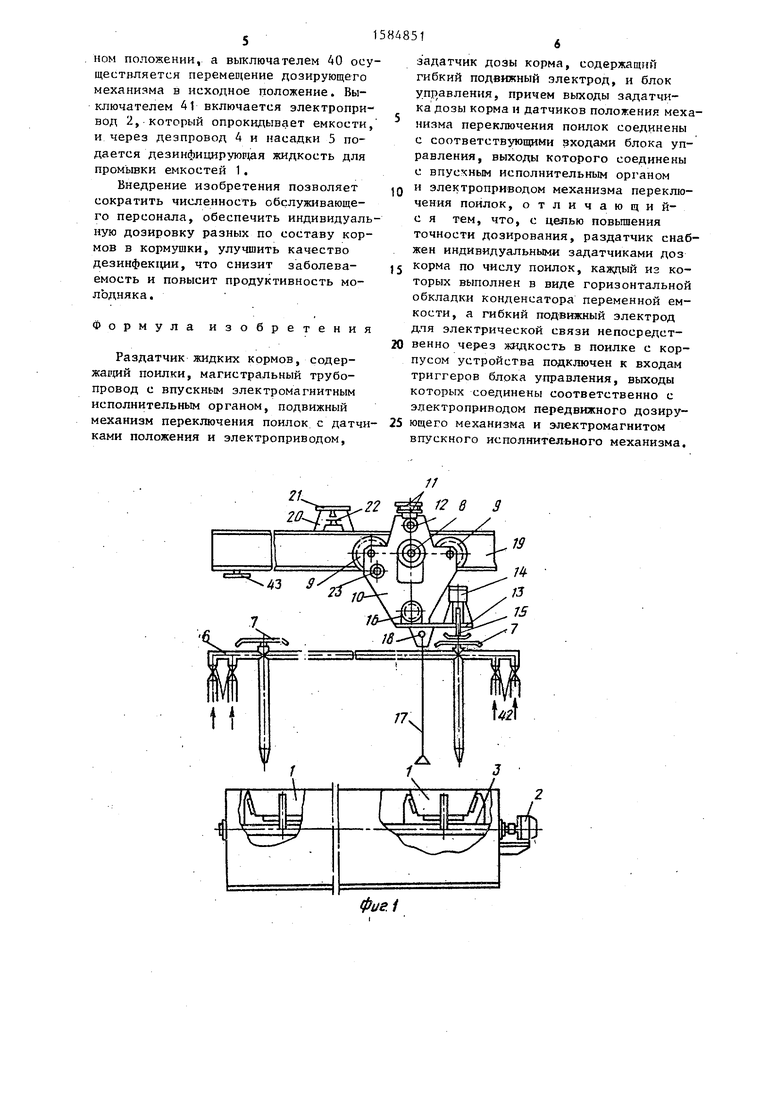
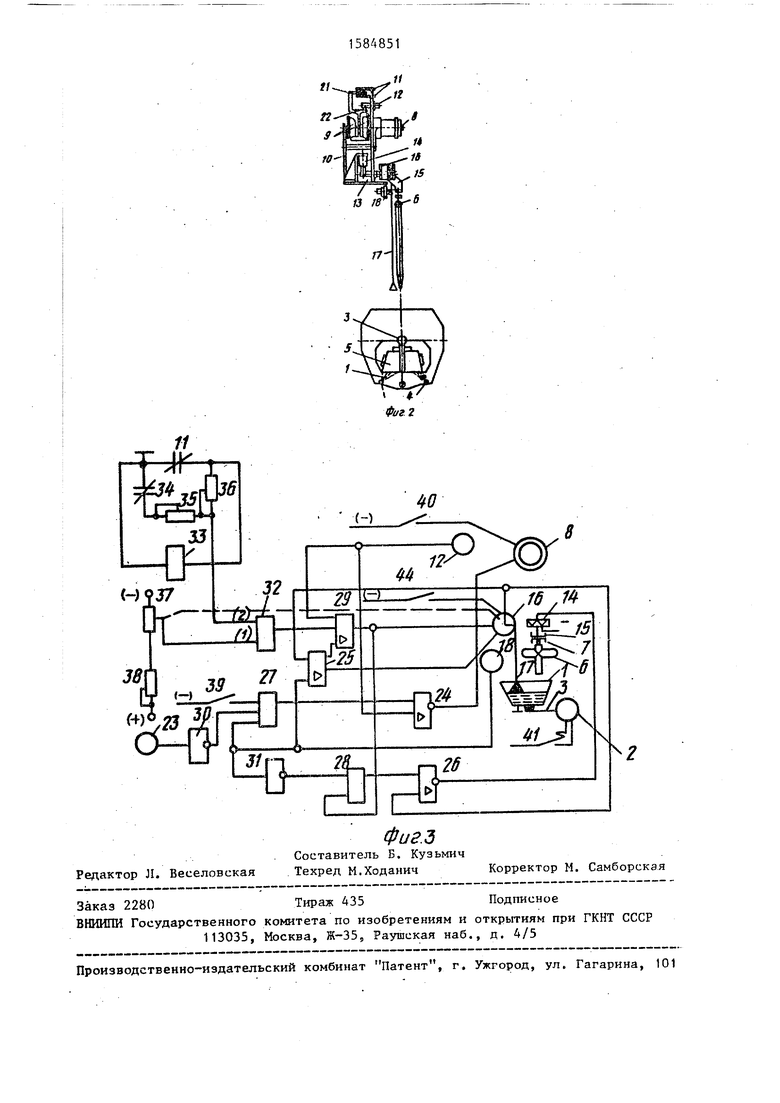
На фиг. 1 представлено устройство, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - принципиальная схема устройства.
Раздатчик жидких кормов содержит емкости кормушек 1, с электроприводом 2, ось 3, связывающую электропривод с емкостями кормушек, трубопроводы 4 дезинфицирующих жидкостей с насадками 5, трубопроводы 6 жидкого корма с кранами 7, передвижной дозирующий механизм включающий электропривод 8, кинематически связанный с катками 9, соединенными с корпусом 10j на верхней части которого закреплены пластины конденсатора 11 переменной емкости, бесконтактный
датчик 12 положения передвижного дозирующего механизма. К нижней части корпуса прикреплена площадка 13, на которой размещены электромагнитный впускной исполнительный орган, состоящий из электромагнита 14 и тяги 15, электрический исполнительный орган 16 гибкого подвижного электрода 17, бесконтактный датчик 18 верхнего положения гибкого подвижного электрода, монорельс 19, на котором закреплены изоляторы 20 с пластинами 21 задачи доз конденсатора переменной емкости и пластина 22 бесконтактного датчцка положения передвижного дозирующего механизма, бесконтактный датчик 23 конечного положения передвижного дозирующего механизма, логические элементы: триггеры 24, 25 и 26 с усилителями мощности на выходе, логические элементы И 27, 28 и 29 с усилителем мощности на выходе, логические элементы НЕ 30 и
(Л
ел
00
Ј
00 О
31, нуль-орган 32, генератор 33 высокой частоты, конденсатор 34 переменной, емкости, резисторы 35-38, выключатели 34, 40 и 41, вентиль 42, пластина 43 конечного положения передвижного дозирующего механизма и вентиль 44.
Кормораздатчик жидких кормов работает следующим образом.
Первоначально пластинами 21 задачи доз задаются дозы для каждой кормушки и вентилями 42 подключается необходимая кормосмесь; пластины 21 задачи доз имеют свободное перемещение по горизонтали програ- дуированы в литрах и устанавливаются на монорельсе для каждой кормушки. Затем включателем 39 подается сигнал 1 на вход логического элемента 26. При этом первоначально выключателем 41 гибкий подвижный электрод 27 устанавливается в верхнее положение, тогда с выхода бесконтактного датчика 18 сигнал 1 поступает на входы логических элементов 25, 27 и 31. С выхода логического элемента 27 сигнал 1 поступает на вход логического элемента 24. Последний принимает нулевое состояние и включает электропривод 8 передвижного дозирующего механизма, который начинает перемещаться по монорельсу 19. Как только дозирующий механизм достигает емкости кормушки 1, металлическая пластина 22 входит в воздушный зазор бесконтактного датчика 12, с выхода которого сигнал 1 поступает на входы логических элементов 24 и 29, в результате логический элемент 24 принимает состояни единицы и электропривод 8 обесточивается.
Одновременно пластина 21 задачи доз входит в воздушный зазор конденсатора 11 и величина емкости изменяется, при этом электрический мост, состоящий из резистора 36 и 35 и конденсаторов 11 и 34, получает разбаланс . Напряжение разбаланса посту-1 пит на второй вход нуль-органа 32. Резисторами 37 и 38 задается эталонное напряжение, которое подается на первый вход нуль-органа- 32. При этом нуль-орган 32 открывается и с его выхода сигнал поступает на вход логического элемента 29, который срабатывает и замыкает цепь электрического исполнительного органа 16.
5
0
5
0
5
0
5
В результате гибкий подвижный электрод 17 начинает опускаться на заданный объем жидкости. При этом движок резистора 37, кинематически связанный с электрическим исполнительным органом 16, также опускается и, соответственно, величина напряжения на первом входе нуль-органа 32 изменяется. По достижении равенства напряжения на входах нуль-органа 32 с его входа сигнал 1 поступает на вход логического элемента 29 и движение гибкого подвижного электрода 17 прекращается. Одновременно сигнал 1 с выхода логического элемента 29 поступает на вход логического элемента 28. При этом с выхода бесконтактного датчика 18 сигнал О поступает на вход логического элемента 31, с выхода которого сигнал 1 поступает на второй вход логического элемента 28, а в результате с выхода последнего сигнал 1 поступает на вход логического элемента 2b. Логический 1 элемент 26 принимает нулевое состояние и замыкает цепь электромагнита исполнительного органа 14, который открывается, и жидкий корм начинает поступать в емкость кормушки 1. По достижении гибким электродом 17 уровня жидкого корма сигнал 1 поступает на входы логических элементов 25 и 26. При этом логический элемент 26 принимает состояние единицы и закрывает электромагнитный исполнительный орган 14 и логический элемент 25 принимает нулевое состояние и включает электрический исполнительный орган 16 в обратном направлении. По достижении гибким подвижным электродом 17 верхнего конечного положения бесконтактный датчик 18 срабатывает и сигнал 1 поступает на входы логических элементов 27, 31 и 25, последний из которых принимает состояние единицы и обесточивает электропривод 16, одновременно с выхода логического элемента 27 сигнал 1 поступает на вход логического элемента 24, который принимает нулевое состояние и включает повторно электропривод 8, последний перемещает подвижный дозирующий механизм к следующей кормушке. Цикл остановки и заполнения последующей кормушки аналогичен.
Бесконтактный датчик 23 и пластина 43 служат для остановки передвижного дозирующего механизма в конечном положении, а выключателем 40 осуществляется перемещение дозирующего механизма в исходное положение. Выключателем 41 включается электропривод 2, который опрокидывает емкости, и через деэпровод 4 и насадки 5 по- дается дезинфицирующая жидкость для промывки емкостей 1.
Внедрение изобретения позволяет сократить численность обслуживающего персонала, обеспечить индивидуальную дозировку разных по составу кормов в кормушки, улучшить качество дезинфекции, что снизит заболеваемость и повысит продуктивность молодняка .
Формула изобретения
Раздатчик жидких кормов, содержащий поилки, магистральный трубопровод с впускным электромагнитным исполнительным органом, подвижный
10
J5
задатчик дозы корма, содержащий гибкий подвижный электрод, и блок управления, причем выходы задатчи- ка дозы корма и датчиков положения мех низма переключения поилок соединены с соответствующими входами блока уп равления, выходы которого соединены с впусхным исполнительным органом и электроприводом механизма переклю чения поилок, отличающий- с я тем, что, с целью повышения точности дозирования, раздатчик сна жен индивидуальными задатчиками доз корма по числу поилок, каждый из которых выполнен в виде горизонтальной обкладки конденсатора переменной емкости, а
гибкий подвижный электрод
для электрической связи непосредст- 20 венно через жидкость в поилке с корпусом устройства подключен к входам триггеров блока управления, выходы которых соединены соответственно с электроприводом передвижного дозируг « «лпвт -электроприводом передвижного почи
механизм переключения поилок с датчи- 25 ющего механизма и з ект ом1гнитом ками положения и электроприводом, впускного исполнительного механизма.
0
5
задатчик дозы корма, содержащий гибкий подвижный электрод, и блок управления, причем выходы задатчи- ка дозы корма и датчиков положения механизма переключения поилок соединены с соответствующими входами блока управления, выходы которого соединены с впусхным исполнительным органом и электроприводом механизма переключения поилок, отличающий- с я тем, что, с целью повышения точности дозирования, раздатчик снабжен индивидуальными задатчиками доз корма по числу поилок, каждый из которых выполнен в виде горизонтальной обкладки конденсатора переменной емкости, а
гибкий подвижный электрод
для электрической связи непосредст- венно через жидкость в поилке с корпусом устройства подключен к входам триггеров блока управления, выходы которых соединены соответственно с электроприводом передвижного дозиру-электроприводом передвижного почи
ющего механизма и з ект ом1гнитом впускного исполнительного механизма.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи жидких кормов в поилки | 1975 |
|
SU654219A1 |
| Устройство для раздачи жидких кормов | 1984 |
|
SU1209126A1 |
| АВТОМАГИЧЕСКАЯ УСТАНОВКА | 1967 |
|
SU193827A1 |
| Установка для дозированной раздачи кормов | 1988 |
|
SU1655403A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1984 |
|
SU1168159A1 |
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1978 |
|
SU727184A1 |
| Автоматический дозатор кормов | 1990 |
|
SU1803008A1 |
| Кормушка для рыб | 1980 |
|
SU942641A1 |
| Кормораздатчик | 1990 |
|
SU1752293A1 |
Изобретение относится к сельскохозяйственной технике, а именно к устройствам для раздачи жидких кормов на животноводческих комплексах. Цель изобретения - повышение точности дозирования. Для каждой кормушки 1 предусматривают отдельный задатчик 11, выполненный в виде пластины переменного конденсатора, перемещающегося по горизонтали, проградуированного в литрах, которым задается доза жидкого корма, и общий гибкий подвижный электрод 17, электрически связанный через жидкость в кормушках 1 с логическими элементами, электрически соединенными с электроприводом 8 дозирующего механизма. 3 ил.
19
t
w
8
| Устройство для раздачи жидких кормов в поилки | 1975 |
|
SU654219A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
