11
Изобретение относится к сельско- хозййственному животноводству и предназначено преимущественно для раздачи жидких кормов на фермах и животноводческих комплексах.
Целью изобретения является повьше- ние точности работы устройства.
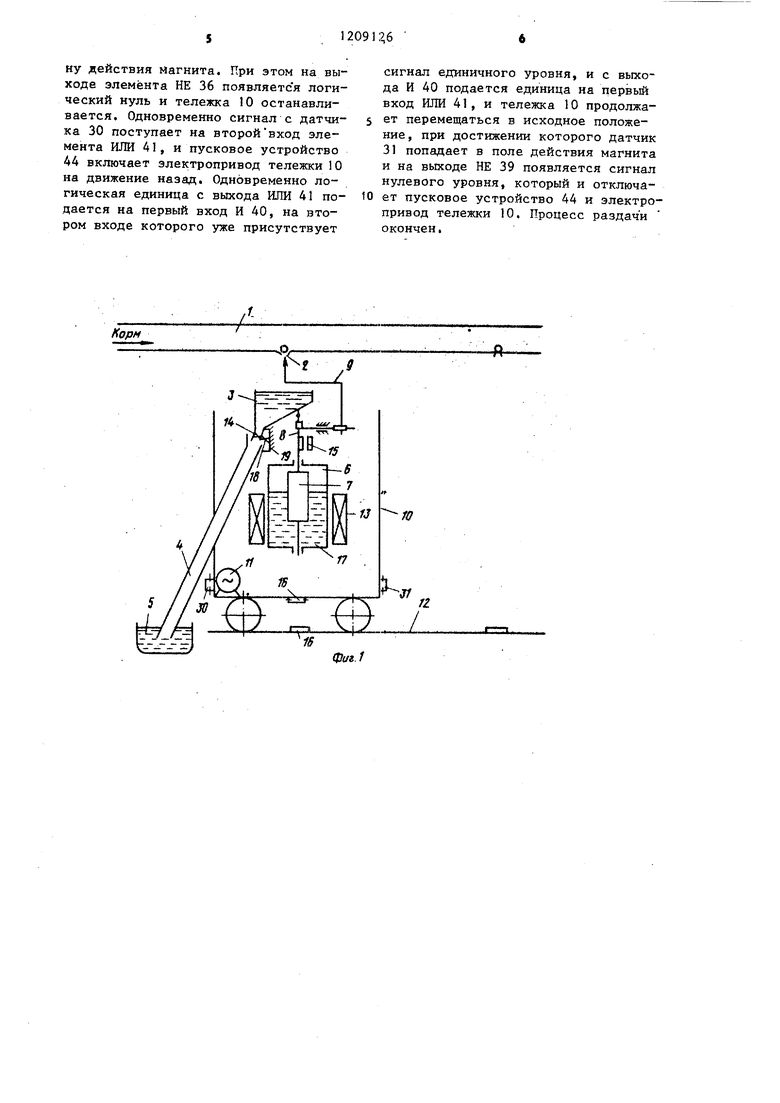
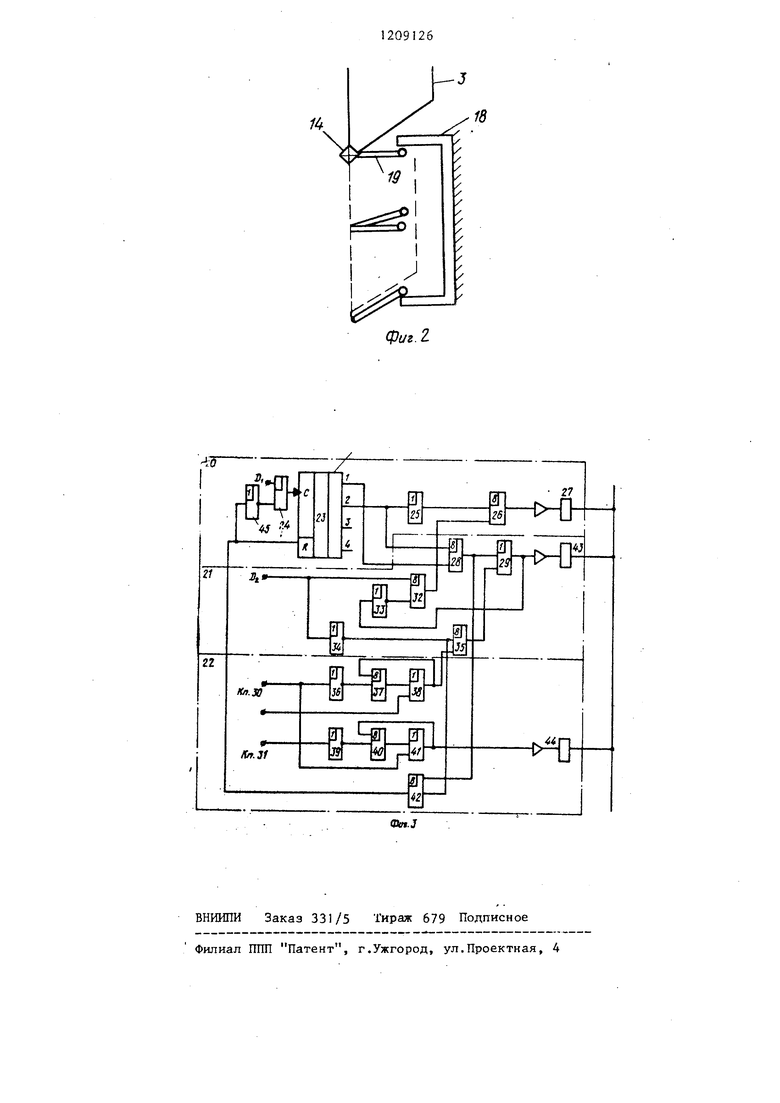
На фиг.1 схематически изображено устройство, общий вид; на фиг.2 - система упоров гравитационного выпуск ного клапана; на фиг.З - электрическая схема устройства.
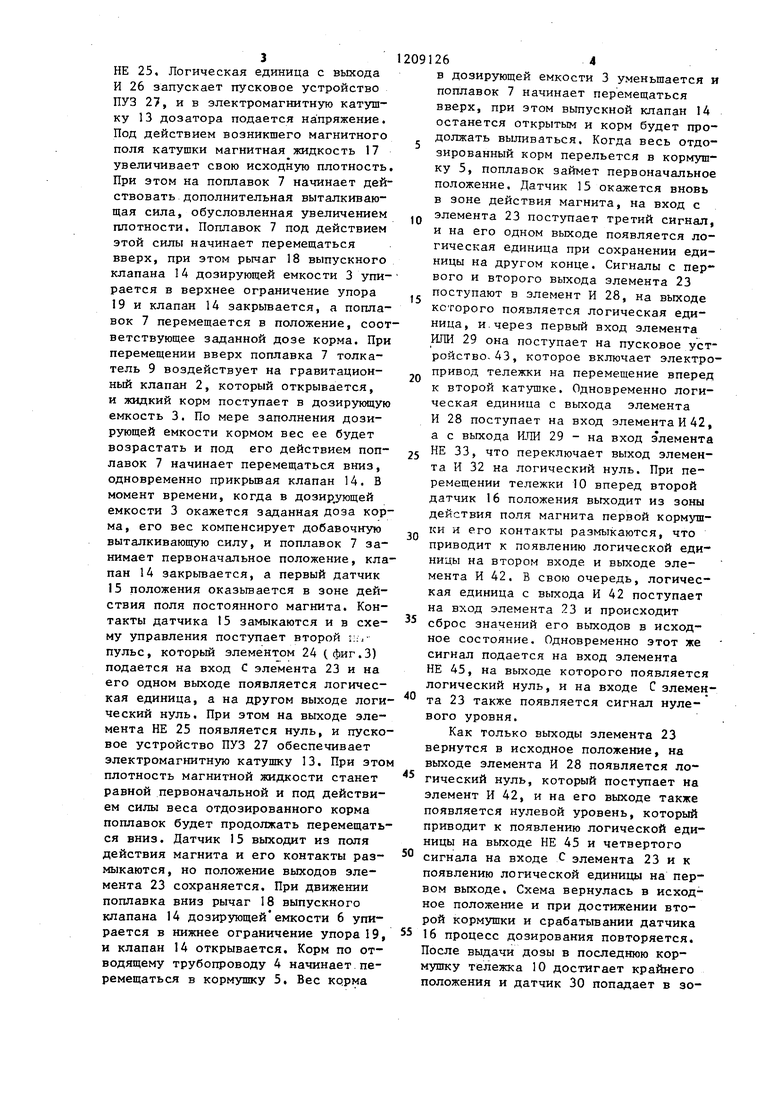
Устройство для раздачи жидких кормов содержит кормопровод 1с гравитационными клапанами 2, под которьыи расположена дозирующая емкость 3 посредством отводящего трубопровода 4 связанная с кормущкой 5, дозатор кормов j вьтолненный в виде сосуда 6 с цилиндрическим поплавком 7 имеющим шток 8, через шарнир, связанный с дозирующей емкостью 3 и с толкателем гравитационного клапана 9, при этом дозатор с дозирующей емкостью 3 размещен на самоходной тележке 10 с электроприводом 11 с возможностью перемещения по направляющем 12 вдоль кормопровода 1, электромагнитную катушку 13, гравитационный выпускной клапан 14, первый 15 и второй 16 дат чики положения, а сосуд заполнен электромагнитной жидкостью 17, выпускной клапан 14 имеет рычаг 18 с упором 19 и схему управления, вьтол- ненную из блока 20 управления дозато ром, блока 2 управления перемещением тележки и блока 22 управления возвратом тележки, причем вход блока управлением дозатором подключен в выходу первого датчика 15 положения, а выход - к электромагнитной катушке дозатора 13, вход блока управления перемещением тележки соединен со вторым датчиком 16 положения, а выход - с одним входом электропривода. 11, к другому входу которого подключен выход блока управления возврата тележки 10, а датчики 15 и 16 положения выполнены в виде герметичных контактов с постоянными магнитами.
В блоке 20 управления дозатором использован счетный триггер 23,, счетный вход которого подК;Г1ючен к выходу первого датчика положения 15 через элемент И 24, а второй выход счетно- го триггера 23 подключен к электромагнитной катушке дозатора 13 через элементы ИЛИ 25, И 26 и пусковое уст.262
ройство 27. Вход счетного триггера 23 -подключен к первому и второму выходу этого же элемента через элементы И 28 и 29.
В блоке 21 управления возвратом тележки использованы датчики 30 начала пути и конца пути 31. Блоки управления перемещением тележки 21 и возвратом тележки 22 выполнены из логических элементов И, ИЛИ, НЕ 32 - 42 и пусковых устройств 43 и 44; устройство содержит также элемент НЕ 45.
Устройство работает следующим образом.
При подаче .напряжения на схему управления тележкой с первого датчика 15 положения на вход С элемента 23 поступает первый сигнал, на его первом выходе появляется логическая единица, поступающая на второй вход элемента И 28. При нажатии кнопки на второй вход элемента ИЛИ 38 подается сигнал и с его выхода логическая единица подается на второй вход элемента И 35, на первом входе которого уже имеется единичный сигнал с выхода НЕ 34, логическая единица с выхода И 35 подается на вход ИЛИ 29, усиленный сигнал с выхода которого поступает на пусковое устройство 43, которое включает электропривод 11 тележки 10, и она начинает перемещаться к кормушке 5. При достижении кормушки второй датчик 16 положения попадает в зону поля постоянного магнита, установленного под кормущкой, его контакты замыкаются и сигнал поступает на входы элементов И 32 и НЕ 34. На выходе элемента НЕ 34 появляется логический нуль, который последовательно подается на входы элементов И 35 и 1ШИ 29, на выходе последнего также появляется нуль, и пусковое устройство 43 отключает электропривод 1 тележки 10. Одновременно логический нуль с выхода элемента ИЛИ 29 подается на вход НЕ 33J на выходе которого появляется логическая единица, передаваемая на второй вход элемента И 32, на первом входе которого уясе присутствует сигнал с первого датчика 15 положения. На выходе И 32 появляется логическая единица, которая поступает на второй вход элемента И. 26, на первом входе которого уже присутствует единица с выхода
НЕ 25, Логическая единица с выхода И 26 запускает пусковое устройство ПУЗ 27, и в электромагнитную катушку 13 дозатора подается на пряжение. Под действием возникшего магнитного поля катушки магнитная жидкость 17 увеличивает свою исходную плотность. При этом на поплавок 7 начинает действовать дополнительная выталкивающая сила, обусловленная увеличением плотности. Поплавок 7 под действием этой силы начинает перемещаться вверх, при этом рычаг 18 выпускного клапана 14 дозирующей емкости 3 упирается в верхнее ограничение упора 19 и клапан 14 закрьтается, а поплавок 7 перемещается в положение, соответствующее заданной дозе корма. При перемещении вверх поплавка 7 толкатель 9 воздействует на гравитационный клапан 2, который открывается, и жидкий корм поступает в дозирующую емкость 3. По мере заполнения дозирующей емкости кормом вес ее будет возрастать и под его действием поплавок 7 начинает перемещаться вниз, одновременно прикрьшая клапан 14. В момент времени, когда в дозир ующей емкости 3 окажется заданная доза корма, его вес компенсирует добавочную выталкивающую силу, и поплавок 7 занимает первоначальное положение, клапан 14 закрьтается, а первый датчик 15 положения оказывается в зоне действия поля постоянного магнита. Контакты датчика 15 замыкаются и в схему управления поступает второй г:-,- пульс, который элементом 24 (фиг.З) подается на вход С элемента 23 и на его одном выходе появляется логическая единица, а на другом выходе логический нуль. При этом на выходе элемента НЕ 25 появляется нуль, и пусковое устройство ПУЗ 27 обеспечивает электромагнитную катушку 13. При это плотность магнитной жидкости станет равной первоначальной и под действием силы веса отдоэированного корма поплавок будет продолжать перемещаться вниз. Датчик 15 выходит из поля действия магнита и его контакты размыкаются, но положение выходов элемента 23 сохраняется. При движении поплавка вниз рычаг 18 выпускного клапана 14 дозирующей емкости 6 упирается в нижнее ограничение упора 19, и клапан 14 открывается. Корм по отводящему трубопроводу 4 начинает.перемещаться в кормушку 5. Вес корма
0
в дозирующей емкости 3 уменьшается и поплавок 7 начинает перемещаться вверх, при этом выпускной клапан 14 останется открытым и корм будет продолжать выливаться. Когда весь отдо- зированный корм перельется в кормушку 5, поплавок займет первоначальное положение. Датчик 15 окажется вновь в зоне действия магнита, на вход с
Q элемента 23 поступает третий сигнал, и на его одном выходе появляется логическая единица при сохранении единицы на другом конце. Сигналы с пер вого и второго выхода элемента 23
поступают в элемент И 28, на выходе которого появляется логическая единица, и.через первый вход элемента ИЛИ 29 она поступает на пусковое устройство- 43, которое включает электропривод тележки на перемещение вперед к второй катушке. Одновременно логическая единица с выхода элемента И 28 поступает на вход элемента И 42, а с выхода ИЛИ 29 - на вход элемента
5 НЕ 33, что переключает выход элемента И 32 на логический нуль. При перемещении тележки 10 вперед второй датчик 16 положения выходит из зоны действия поля магнита первой кормушки и его контакты размыкаются, что приводит к появлению логической единицы на втором входе и выходе элемента И 42. В свою очередь, логическая единица с выхода И 42 поступает на вход элемента 23 и происходит
сброс значений его выходов в исходное состояние. Одновременно этот же сигнал подается на вход элемента НЕ 45, на выходе которого появляется логический нуль, и на входе С злемен та 23 также появляется сигнал нулевого уровня.
Как только выходы элемента 23 вернутся в исходное положение, на выходе элемента И 28 появляется ло гический нуль, который поступает на элемент И 42, и на его выходе также появляется нулевой уровень, который приводит к появлению логической единицы на выходе НЕ 45 и четвертого
сигнала на входе С элемента 23 и к появлению логической единицы на первом выходе. Схема вернулась в исходное положение и при достижении второй кормушки и срабатывании датчика
16 процесс дозирования повторяется. После выдачи дозы в последнюю кормушку тележка 10 достигает крайнего положения и датчик 30 попадает в зону действия магнита. При этом на выходе элемента НЕ 36 появляется логический нуль и тележка 10 останавливается. Одновременно сигнал с датчика 30 поступает на второй вход элемента ИЛИ 41, и пусковое устройство 44 включает электропривод тележки 10 на движение назад. Одновременно логическая единица с выхода ИЛИ 41 подается на первый вход И 40, на втором входе которого уже присутствует
сигнал единичного уровня, и с выхода И 40 подается единица на первый вход ИЛИ 41, и тележка 10 продолжает перемещаться в исходное положение , при достижении которого датчик 31 попадает в поле действия магнита и на выходе НЕ 39 появляется сигнал нулевого уровня, который и отключает пусковое устройство 44 и электропривод тележки 10. Процесс раздачи окончен.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический дозатор кормов | 1988 |
|
SU1644845A1 |
| Автоматический дозатор кормов | 1990 |
|
SU1803008A1 |
| Раздатчик жидких кормов | 1988 |
|
SU1584851A1 |
| Устройство для дозированного кормления животных | 1986 |
|
SU1442150A1 |
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655407A1 |
| Устройство для порционного кормления животных | 1986 |
|
SU1375204A1 |
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655406A1 |
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Устройство для раздачи жидких кормов | 1990 |
|
SU1743511A1 |

Корм
фиг.1
/4
фиг. г
| Устройство для распределения жидких кормов | 1978 |
|
SU865234A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для раздачи жидких кормов | 1981 |
|
SU1001897A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
