Изобретение относится к землеройной технике, а более конкретно - к -каналокопателям..
Цель изобретения - повьшение ка- честна прокладываемого канала путем повышения точности регулирования глубины копания.
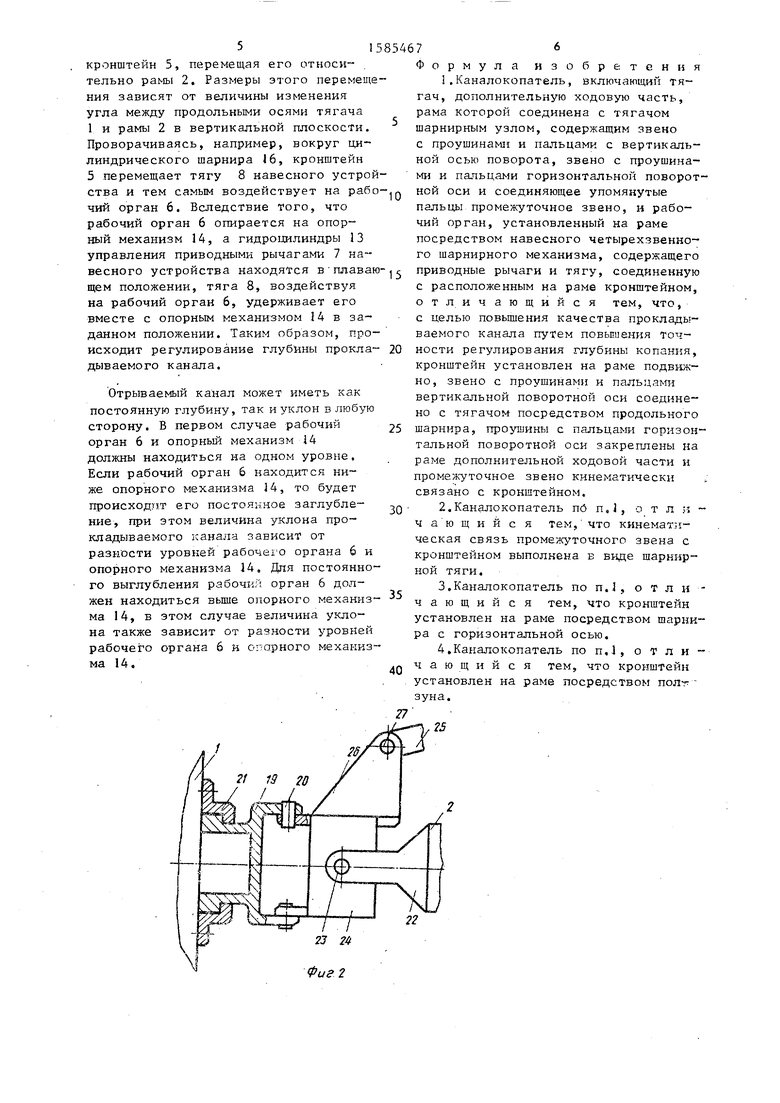
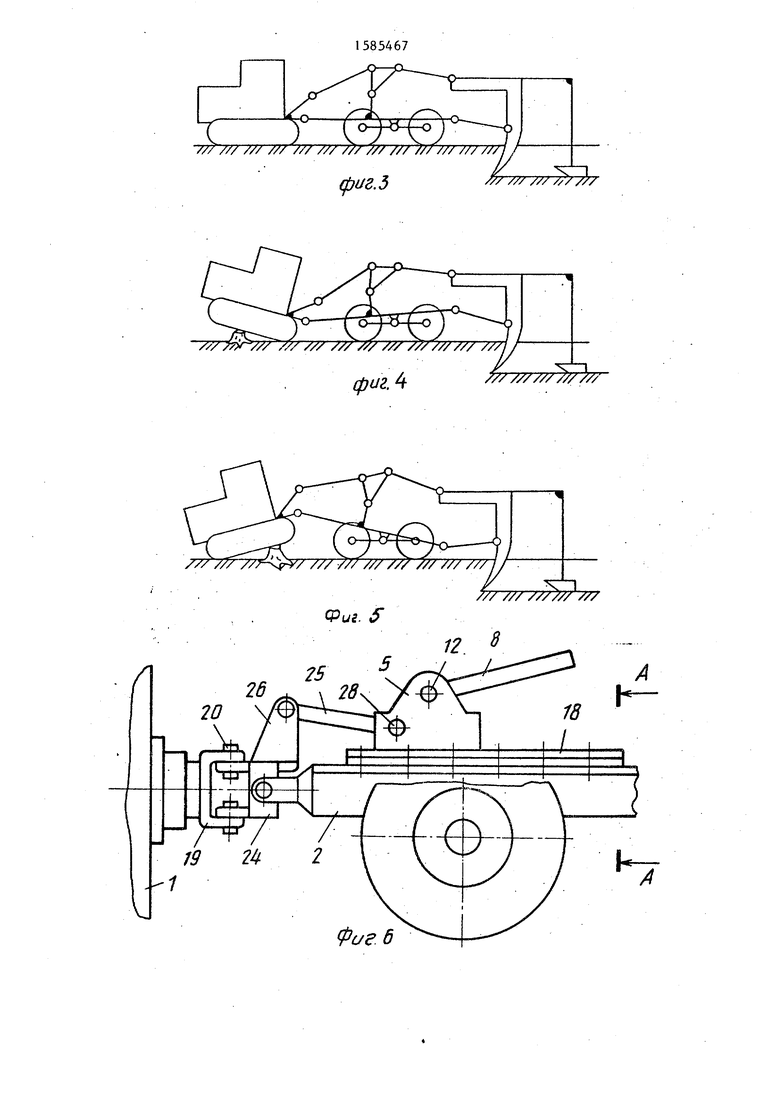
На фиг. изображен каналокопателъ вид сбоку; на фиг.2 - шарнир сое- динения балансирной тележки с тягачом, вид сбоку; на фиг.3,4,5 - кинематическая схема; на фиг.б,7 - варианты установки кронштейна на раме балансирной тележки; на фиг.8 - опор ный механизм, вид сбоку.
Канал окопатель включает тягач 1 .. и дополнительную ходовую секцию, выполненную в виде рамы 2 с балансира ной тележкой 3, которая соединена с тягачом 1 при помощи трехстепеннного шарнира 4. На раме 2 расположен кронштейн 5 и при помощи навески рабочий орган 6.Навеска состоит из четырехзвенного шарнирного механизма и включает приводные рычаги 7 и тягу 8. Приводные рычаги 7 соединены с рабочим органом 6 посредством шарниров 9, а с рамой 2 при помощи шарниров 10. Тяга 8 соединена с рабочим органом 6,шарниром 11, ас кронштейном 5 шарниром 12. Управление привод ными рычагами 7 осуществляется гидроцилиндрами 23. Рабочий орган 6 снабжен опорным механизмом 14, .управ ление которым может осуществляться гидроцилиндром 15.
Кронштейн 5 установлен на раме 2 подвижно. Подвижная установка крон-штейна 5 возможна, напри мер, при по- мощи цилиндрического шарнира 16. Кроме того5 подвижная установка кронштейна 5 на раме 2 может быть выполнена, например, посредством ползуна 17j на котором жестко крепится кронштейн 5, и неподвижно установленных на раме 2 направляющих 18.
Трехстепенной шарнир 4 включает звено 19, в проушинах которого установлены пальцы 20 вертикальной поворотной оси, зве .но 19 соединено с тягачом 1 при помопда продольного шарнира 21. Проушины 22, в которых смонтированы пальщ.1 23 горизонтальной поворотной оси трехстепенного шарнира, смонтированы на раме 2 Промежуточное звено 24 трехстепенно шарнира 4 соединяет пальцы 20 и 23
О 5
о 5
0
5
его вертикальной и горизонтальной поворотных осей.
Промежуточное звено 24 имеет кинематическую связь с кронштейном 5. Кинематическая связь может быть вы- полнена, например, в виде тяги 25, соединенной с неподвижно установленными на промежуточном звене 24 проушинами 26 посредством шарнира 27, а с кронштейном 5 при помощи шарнира 28.
Опорньй механизм каналокопателя включает рычаги 29, 30, тягу 3J, стойку 32, лыжу 33 и переходник 34. Управление опорным механизмом осуществляется при помощи гидроцилиндра 15. Гйдроцилиндр J5 посредством шарнира 35 соединен с проушиной 36, жестко установленной на рабочем органе 6, а его шток шарниром 37 связан с переходником 34. Переходник 34 и рычаг 29 шарниром 38 соединены с жестко установленной на рабочем органе 6 проушиной 39. Шарнир 40 соединяет мейсду собой рычаг 29, тягу 31 и стойку 32. Тяга 31 шарниром 41 связана с переходником 34, а стойка 32 шарниром 42 с лыжей 33. На стойке 32 неподвижно установлена проушина 43, с которой шарниром 44 соединен рычаг 30. Другой конец рычага 30 при помощи шарнира 45 связан с жестко уста- новленной на рабочем оргайе б проушиной 46. Данная конструкция опорного механизма позволяет регулировать по- ложенг-хе лыжи 33 по высоте.
Рабочий орган может быть как ак- тивного так и пассивного действия. Во время работы каналокопателя рабочий-орган 6 опирается на опорный механизм 14s а гидроцилиндры 13 управ- лання приводными рычагами 7 навесного устройства находятся в плавающем положении.
При движении каналокопателя в процессе работы вследствие влияние неровностей микрорельефа поверхности изменяется угол между продо тьными осями тягача 1 и рамы 2 в вертикальной плоскости, т.е. рама 2 совершает вращательное движение вокруг пальцев
23горизонтальной поворотной оси трехстепенного шарнира 4, которые установлены на промежуточном звене
24, Б результате вращательного движения рамы 2 проушины 26, жестко установленные на промежуточном звене 24, через тягу 25 воздействую-г на
Фиг 2
22
Т
/// /// /// ///
Т (
/// /// /// ////// ///////У
фиг. 5
/// //
:
/// /// /// /// ///
| название | год | авторы | номер документа |
|---|---|---|---|
| Землеройная машина | 1981 |
|
SU1008371A1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1992 |
|
RU2034961C1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1993 |
|
RU2035550C1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2012 |
|
RU2515720C2 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| МАШИНА ДЛЯ РЫТЬЯ ТРАНШЕЙ | 1966 |
|
SU184732A1 |
| МЕХАНИЗМ НАВЕСКИ ТРАКТОРА | 2013 |
|
RU2542761C1 |
| КУСТОРЕЗ | 2003 |
|
RU2258354C1 |
| Машина для отрывки каналов | 1978 |
|
SU800298A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |

Изобретение относится к землеройной технике. Цель - повышение качества прокладываемого канала путем повышения точности регулирования глубины копания. Каналокопатель включает соединенную с тягачом 1 посредством шарнира 4 балансирную тележку 3 с рамой 2. На раме 2 расположены кронштейн 5 и навеска с рабочим органом 6. Навеска состоит из четырехзвенношарнирного механизма с рычагами 7, тягой 8, кронштейном 5 и рабочим органом 6. Управление рычагами 7 осуществляют гидроцилиндры 13. Рабочий орган 6 имеет опорный механизм 14, управление которым осуществляет гидроцилиндр 15. Кронштейн 5 установлен на раме 2 при помощи шарнира 16 или на скользящей опоре. Шарнир 4 содержит звено 19, которое соединено с тягачом 1 с помощью продольного шарнира 21, и промежуточное звено 24, которое соединено со звеном 19 вертикальными пальцами 20, а с рамой 2 - проушинами 22 с горизонтальными пальцами 23. Звено 24 связано с кронштейном 5 шарнирной тягой 25. При работе изменяется продольный угол между тягачом 1 и рамой 2 балансирной тележки 3, при этом проушины 26 через тягу 25, кронштейн 5, тягу 8 воздействуют на рабочий орган 6 и удерживают его вместе с опорным механизмом 14 в заданном положении. Гидроцилиндр 13 находится в плавающем положении. Отрываемый канал может иметь как постоянную глубину, так и уклон в любую сторону, что определяется взаимным расположением опорного механизма 14 относительно рабочего органа 6. 3 з.п. ф-лы, 7 ил.
/// /// //7-. /// /// /// /// /// /// ///
Фиг. S
Фиг.
фигЛ
/// ////////////
/// ////7//////7
36
S Фие.8
/I-/I
u.7
3 /- /
J
/
| Фрезерный каналокопатель | 1980 |
|
SU945298A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Землеройная машина | 1984 |
|
SU1214854A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
