Фиг.1
Изобретение относится к непрерывному транспорту сыпучих грузов, в частности к конвейерам.
Целью изобретения является сокращение производственной плопдади.
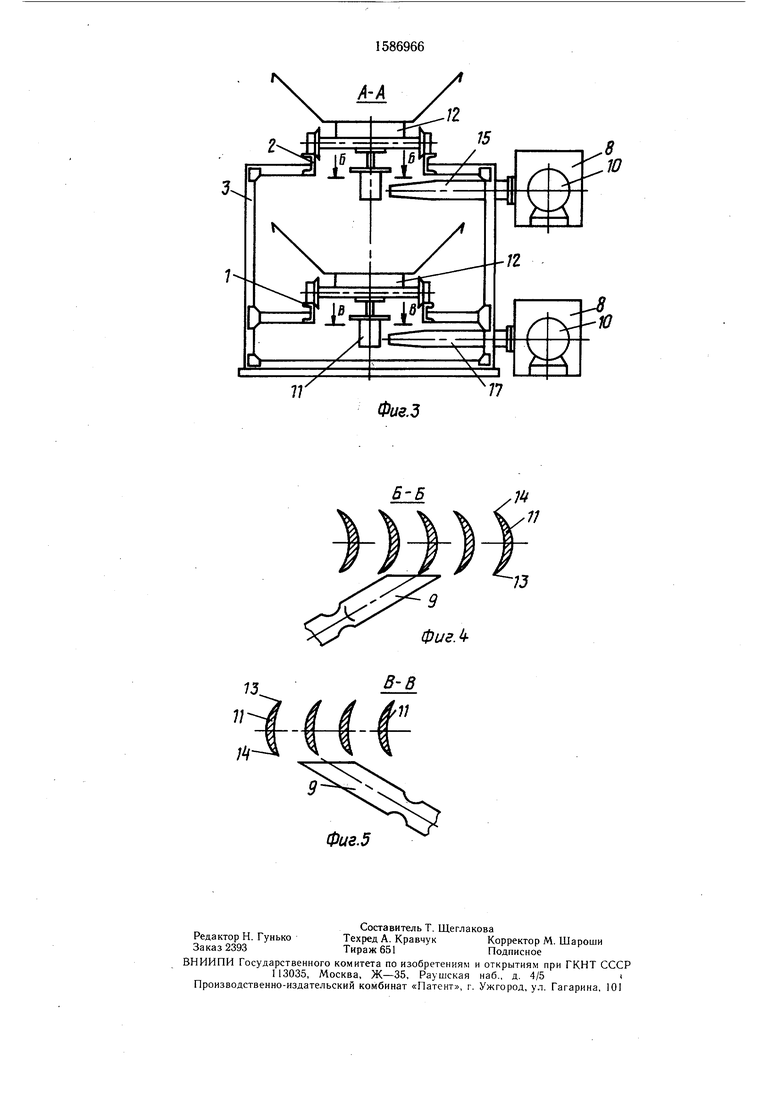
На фиг. I изображена конвейерная система с разрывом, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1.; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 3.
Конвейерная система содержит грузовую ветвь 1 и холостую ветвь 2, расположенную на стойках 3 над грузовой ветвью . Конвейерная система оборудована участком 4 загрузки и участком 5 разгрузки, а также поворотными участками 6 и 6, расположенными в горизонтальной плоскости, которые соединены с грузовой ветвью 1 и холостой ветвью 2 посредством наклонных прямолинейных участков 7 и 7. Подающее приспособление 8 состоит из отдельных групп сопел 9, сообщенных с источником 10 рабочей среды. Лопатки 11 смонтированы на грузоносителях 12. Сопла 9 размещены с воз.можностью подачи рабочей среды на входную кромку 13 лопаток 11 одной ветви и на выходную кромку 14 лопаток 11 другой ветви.
Сопла 9 подающего приспособления 8 объединены в нижнюю группу сопел 15 и расположенную на опорах 16 верхнюю группу сопел 17, первая из которых, расположена с возможностью подачи рабочей среы на выходную кромку 14 лопаток 11, вторая - на входную кромку 13 тех же опаток 11. Опоры 16 и стойки 3 расположеы с одной стороны конвейера.
Конвейерная система работает следуюим образом.
Источник 10 рабочей среды (газ или жидость) подает ее к соплам 15. Рабочая реда направляется на входную кромку 13 лопаток 1 I и приводит грузоносители 12 в движение по холостой ветви 2. Пе0
5
0
реход грузоносителей 12 с холостой ветви 2 на грузовую ветвь 1 осуществляется на наклонном прямолинейном участке 7 и по воротному участку 6, который замкнут в горизонтальной плоскости. В процессе перехода с одной ветви на другую грузоносители 12 не изменяют своего положения (не переворачиваются).
Далее грузоносители 12 перемещаются по грузовой ветви 1 к участку 4 загрузки. Движение грузоносителей 12 по грузовой ветви I и на участке 5 разгрузки осуществляется за счет подачи рабочей среды из нижних сопел ,17 на выходную кромку 14 лопаток 11.
После участка 5 разгрузки грузоносители 12 проходят поворотный участок 6, расположенный в горизонтальной плоскости, и по наклонному прямолинейному участку 7 подаются на холостую ветвь 2.
Формула изобретения
Конвейерная система, включающая грузовую и холостую ветви, расположенные между ними в горизонтальной плоскости
поворотные участки и имеющие лопатки с кромками грузоносители, размещенные с возможностью перемещения под действием рабочей среды, поступающей на лопатки через подающее приспособление с соплами, отличающаяся тем, что, с целью сокращения
производственных площадей, она снабжена каркасной конструкцией в виде стоек для холостой ветви и опор, а сопла подающего приспособления объединены в верхнюю и нижнюю группы, первая из которых расположена с возможностью подачи рабочей
среды на одну кромку лопаток, а вторая - на другую кромку тех же лопаток, причем холостая ветвь расположена на стойках над грузовой ветвью, верхние сопла размещены на опорах над нижними соплами,
а опоры и стойки смонтированы с одной стороны от конвейера.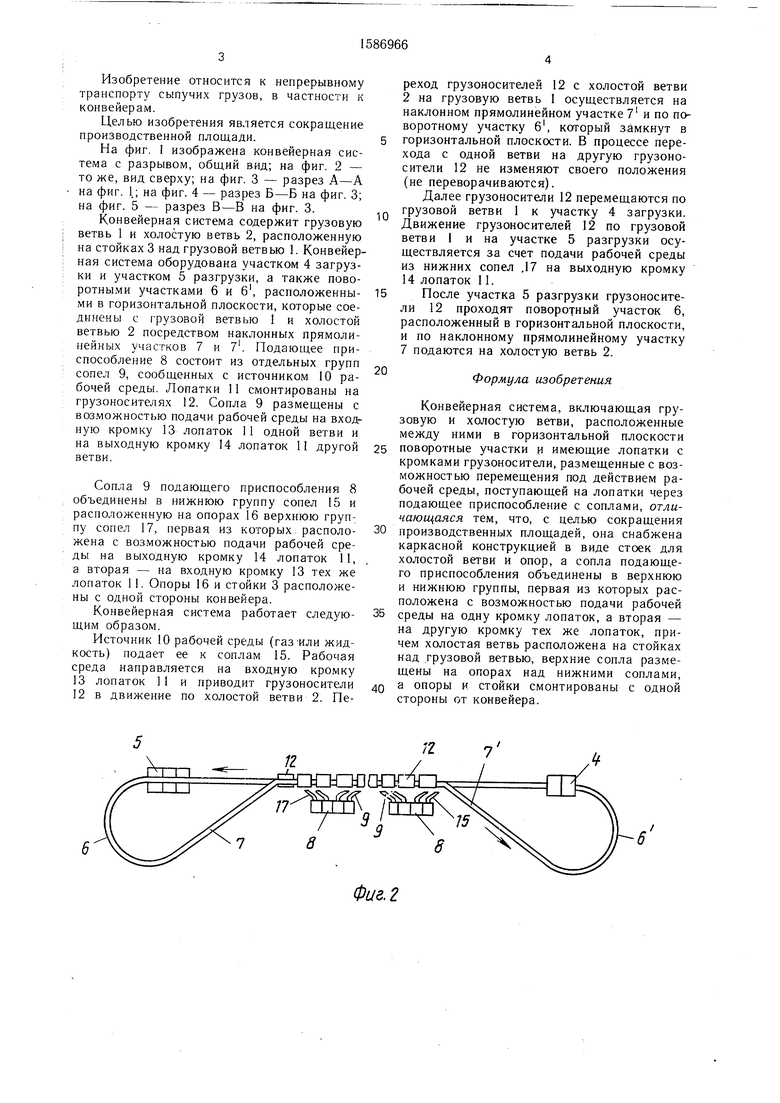
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерная система | 1987 |
|
SU1509306A1 |
| Конвейерная система | 1976 |
|
SU736528A1 |
| Транспортная система | 1988 |
|
SU1572938A1 |
| ЕДИНАЯ ТЕХНОЛОГИЯ ЭКСПЛУАТАЦИИ И ПРОИЗВОДСТВА ТРАНСПОРТНЫХ СРЕДСТВ "МАКСИНИО": БЕЗАЭРОДРОМНЫЙ САМОЛЕТ (ВАРИАНТЫ), ТУРБОВИНТОВЕНТИЛЯТОРНЫЙ ДВИГАТЕЛЬ, КРЫЛО (ВАРИАНТЫ), СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ И СПОСОБ РАБОТЫ ТУРБОВИНТОВЕНТИЛЯТОРНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2460672C2 |
| Отклоняющий барабан ленточного конвейера | 1982 |
|
SU1047798A1 |
| Пластинчатый конвейер | 2016 |
|
RU2649116C2 |
| Конвейерная система | 1988 |
|
SU1606398A1 |
| АЭРОДИНАМИЧЕСКИЕ КОМПОНЕНТЫ СТАТОРА С СОПЛАМИ И СПОСОБЫ ОЧИСТКИ ТУРБОМАШИНЫ | 2019 |
|
RU2774255C1 |
| Паровой котел | 1981 |
|
SU956914A1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 1999 |
|
RU2163561C2 |
Изобретение относится к непрерывному конвейерному транспорту сыпучих грузов. Цель - сокращение производственных площадей. Для этого холостая ветвь 2 конвейера расположена на стойках 3 над грузовой 1 ветвью. Между ветвями 1 и 2 расположены в горизонтальной плоскости поворотные участки 6 и 6 1 и имеющие лопатки с кромками и грузоносители (ГН) 12. Последние размещены с возможностью перемещения под действием рабочей среды, поступающей на лопатки через подающее приспособление 8 с соплами, объединенными в верхнюю 17 и нижнюю 15 группы. Верхняя группа сопел расположена с возможностью подачи рабочей среды на одну кромку лопаток, а нижняя - на другую кромку тех же лопаток. При этом группа 17 сопел расположена на опорах 16. Стойки 3 и опоры 16 расположены с одной стороны конвейера. Переход ГН 12 с холостой ветви 2 на грузовую ветвь 1 осуществляется на наклонном прямолинейном участке 7 1 и по участку 6 1, а обратно - по участку 6 и наклонному участку 7. В процессе перехода ГН 12 с одной ветви на другую они не изменяют своего положения. 4 ил.
в
75 ff
Фиг. 2
Фиг.5
Б-Б
В-В
| Способ рудоподготовки | 1984 |
|
SU1239325A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Пробочный кран | 1925 |
|
SU1960A1 |
| Конвейерная система | 1976 |
|
SU736528A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
