Изобретение относится к использованию наземных гидросооружений в сельском хозяйстве и может быть использовано при создании плотин в каналах и водоемах, предназначенных для различных целей, в том числе для борьбы с наводнениями.
Цель изобретения - повышение качества и надежности управления.
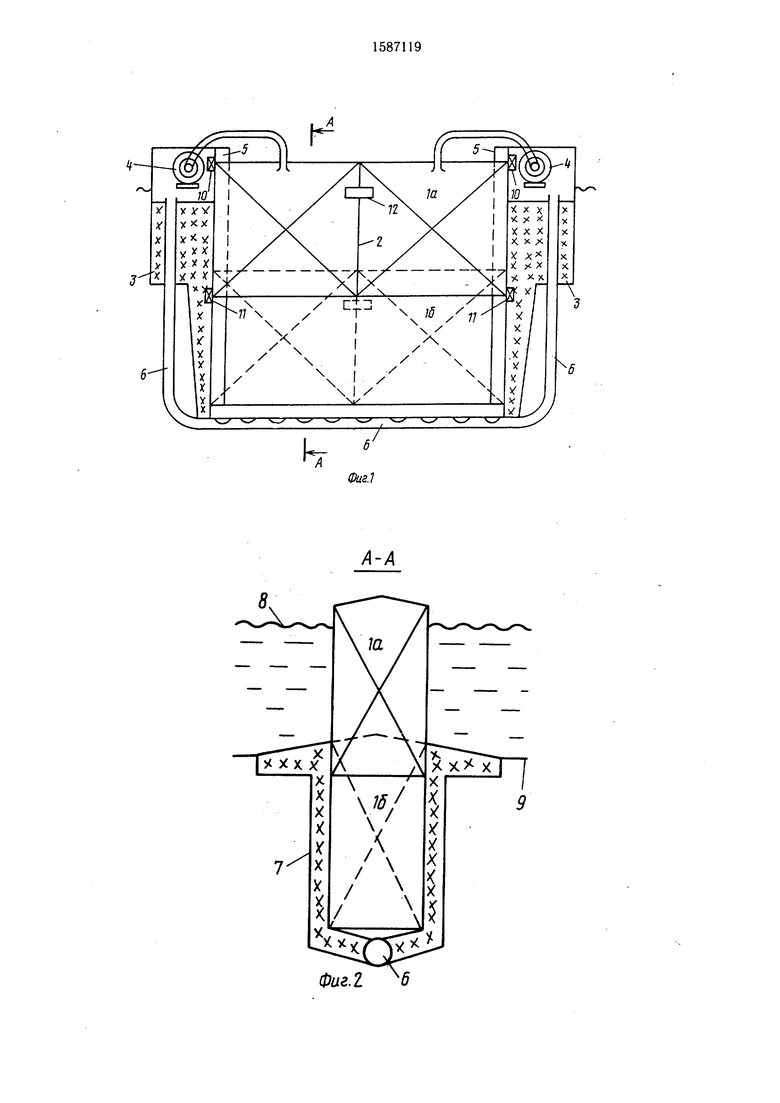
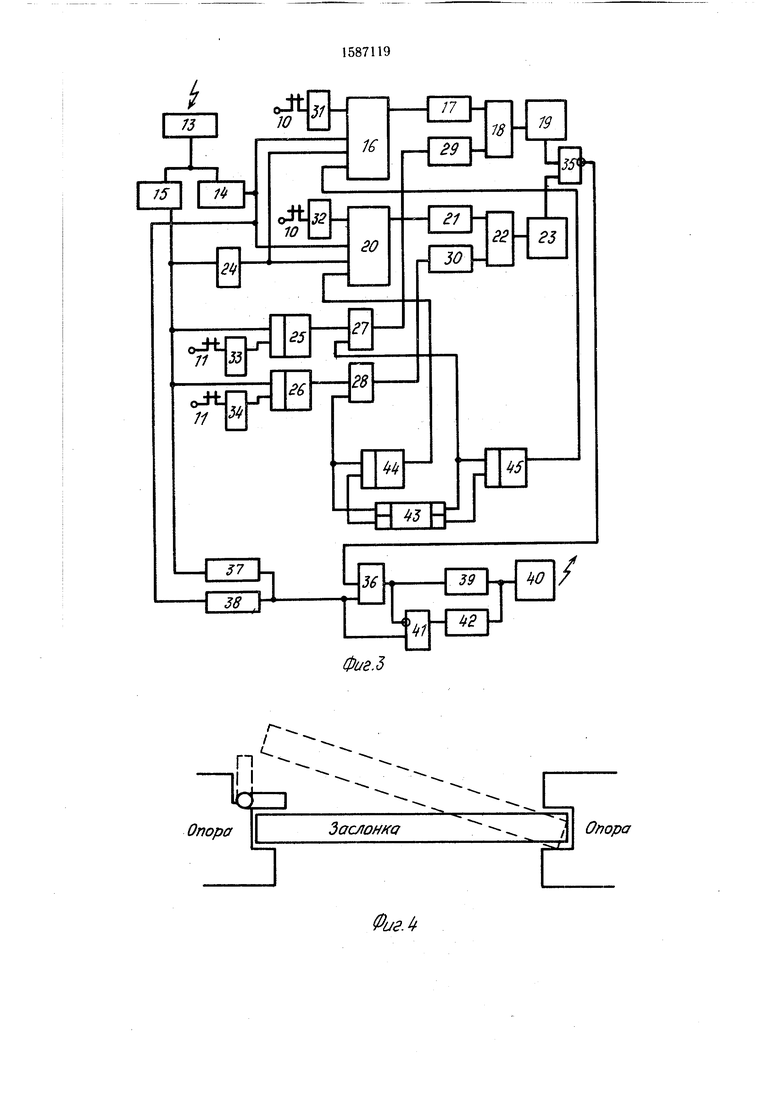
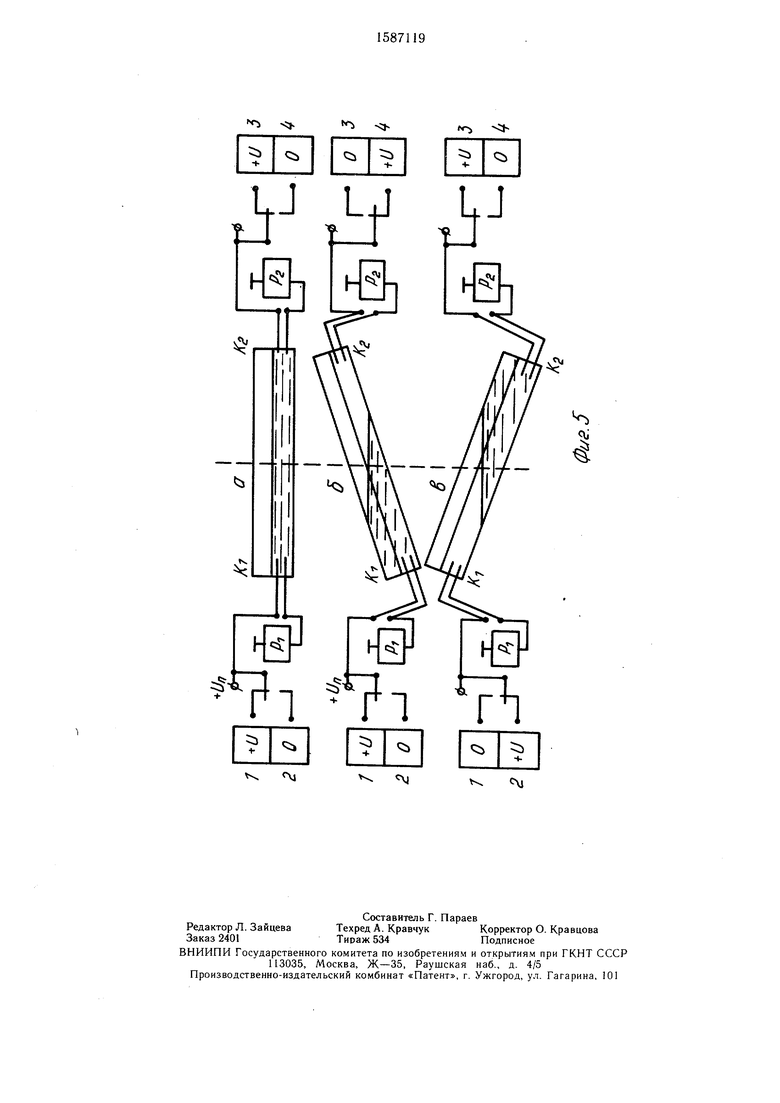
На фиг. 1 показана конструкция системы управления заслонкой; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - блочная принципиальная электрическая схема устройства дистанционного управления исполнительного механизма заслонки; на фиг. 4 - конструкция направляющих опор, вид сверху; на фиг. 5 - процесс срабатывания датчика горизонтального положения заслонки.
Система управления заслонкой 1, разделенной подземной перегородкой 2 на две герметичные полости, включает опоры 3, на которых установлены пневмонасосы 4. Опоры снабжены направляющими 5 и гидросистемой 6 откачки ила из ниши 7 по боковым поверхностям и дну направляющих. Верхняя кромка заслонки в поднятом состоянии расположена выще уровня 8 воды в водоеме, а в опущенном состоянии - на уровне 9 дна водоема. Система управления снабжена также концевыми верхними 10 и нижними 11 выключателями, установленными на левой и правой направляющих, а также датчиком 12 горизонтального положения заслонки. Ниша 7 является продолжением направляющих опор, в которую помещается
01
ос
--4
сс
заслонка в опущенном положении. Заслонка изготавливается полой и герметичной; путем подачи в нее соответствующего количества воздуха ей обеспечивается положительная плавучесть, что суш,ественно облег- чает доставку {с помощью буксира), установку и выполнение последующих ремонтных работ. Установка заслонки производится на плаву путем буксировки заведения ее в направляюш.ие обеих опор и закрытия одной из направляющих поворотом одной из створок на угол 90° {фиг. 4).
Устройство дистанционного управления исполнительным механизмом заслонки (фиг. 2) включает приемник 13 команд управления, подключенный к дешифратору 14 подъема и дешифратору 15 опускания заслонки. Выход дешифратора 14 подъема через первую схеку И 16 и реле 1.7 накачки левой полости соединен с электроприводом 18 реверсивного пневмонасоса (не показан), на валу которого установлен датчик 19 вращения Аналогично для правой полости заслонки к тому же выходу дешифратора подъема подключены вторая схема И 20, реле 21 накачки правой полости, электропривод 22 и датчик 23 вращения. К выходу дешифратора 15 опускания через схему НЕ 24 подключены вторьш входы первой 16 и второй 20 схем И, а также счетные в.ходы первого 25 и второго 26 триггеров, вы.ходы которых соединены с входами третьей 27 и четвертой 28 схем И. Выходы последних связаны с реверсивными электропригюдами 18 и 22 соответст15енно для левой и правой полостей через реле 29 и 30 откачки из левой и правой полостей заслонки. Третьи входы первой и второй схем И соединены с концевыми выключателями 10
датчиков верхнего положения левой и право и полостей заслонок через инверторы 3) и 32. Концевые вы.ключатели il нижнего положения полостей заслонки подключены к вброс- ным входам первого 25 и второго 26 триггеров соответственно через инверторы 33 и 34.
Выходы датчиков 19 и 23 вращения через схему 2 ИЛИ-НЕ 35 подключены к первому входу пятой схемы И 36, второй вход которой чеоез схему 37 задержуси соединен с выходом дешифратора опускания, а через схему 38 задержки - с выходом дешифра- тора подъема. Выход пятой схемы И 36 через первый шифратор 39 соединен с входом 11ередающего устройства 40. Параллельно этой цепи включена схема ИМПЛИКАЦИЯ 41 и второй щифратор 42, причем второй вход схемы ИМПЛИКАЦИЯ 41 соединен с вторым входом пятой схемы И 36.
Первые два противофазных выхода датчика 43 горизонтального положения заслонки подключены к вторым входам третьей 27 и четвертой 28 схем И, а также к счетным входам третьего 44 и четвертого 45 триггеров Обнуляющие входы этих триггеров подключены к вторым двум противофазным выходам датчика 43, а выходы триггеров 44 и 43 - к четвертым входам первой 16 и вто,- рой 20 схем И.
Работает система управления заслонкой плотины следующим образом.
Принятая по радиолинии приемником
13команд команда расшифровывается в де- щифраторах 14 и 15. В случае получения команды на подъем заслонки дешифратор
14подъема вырабатывает на своем выходе логическую единицу, которая подается на вход первой и второй схем И 16 и 20. Вырабатываемая этими схемами И команда обеспечивает включение реле 17 и 21, которые осуществляют подачу электропитания на двигатели электроприво дов 18 и 22 пневмонасосов левого и правого отсеков заслонки на нагнетание в них воздуха. Датчики 19 и 23 вращения двигателей начинают с момента включения двигателей вырабатывать логические единицы на своих выходах, которые поступают на блок ИЛИ-НЕ 35, на входе которого вырабатывается нуль как-при работающих обоих двигателях, так и при работе одного из них. Заслонка поднимается до тех пор, пока своим левым и правым плечами не разомкнет оба концевых выключателя 10 своего верхнего положения. В этот момент нули, вырабатываемые инверторами 32 и 31, переводят схемы И 16 и 20 в противоположные состояния, реле 17 и 21 отключают питание от двигателей приводов пневмонасосов подачи воздуха з отсеки, заслонка останавливается, датчики 19 и 23 вращения вырабатывают на своих выходах нули, которые, попав на вход элемента 2 ИЛИ-НЕ 35, вырабатывают на его выходе логическую единицу, которая поступает на первый вход пятой схемы И 36. Одновременно на вход схемы И 36 поступает от дешифратора 14 подъема единица, задержанная в схеме 38 задержки на время подъема заслонки из нижнего в верхнее положение. При правильной отработке команды на подъем заслонки после ее фиксации в верхнем положении и отключения обоих двигателей пневмонасосов с выхода пятой схемы И 36 логическая единица поступает на вход первого шифратора 39, который выдает сигнал на подъем заслонки на передающее устройство 40. Одновременно логическая единица поступает на первый вход схемы ИМПЛИКАЦИЯ 41 и не пропускает логический сигнал на включение второго шифратора 42.
после отведенного на подъем заслонки времени, равного задержке, осуществляемой схемой 38 задержки, один из двигателей или оба продолжают работать, что свидетельствует о том, что заслонка не поднялась до верхнего положения, логическая единица после схемы задержки 38 поступает на вход схем ИМПЛИКАЦИЯ 41, где в случае отсутствия на первом входе схемы ИМП.ЛИКАЦИЯ 41 логической единицы
сформируется на выходе логическая единица, которая включает второй шифратор 42 и сформирует сигнал «Команда не выполнена. Эта команда и будет передана передающим устройством 40 на пункт управления плотиной.
При получении команды приемным устройством на опускание заслонки срабатывает дешифратор 15 опускания заслонки, вырабатывает логическую единицу на своем выходе, которая через элемент НЕ 24 попадает на вход первой и второй схем И 16 и 20 и выключает пневмонасосы, если они в этот момент работали на подъем заслонки. Кроме того, эта же логическая единица подается на входы первого и второго триггеров 25 и 26, которые при отсутствии команды от концевых выключателей 11 нижнего положения обеих полостей заслонки пропускают логическую единицу на свои выходы, которая, пройдя третью и четвертую схемы И 27 и 28, включает реле 29 и 30, которые подают электрс Тание на двигатели электроприводов для откачки воздуха из левой и правой полостей заслонки. Заслонка опускается по своим направляющим в нишу, т. е. тонет под тяжестью поступившей в заслонку воды, срабатывают концевые выключатели 11 нижнего положения заслонки, на входах инверторов 33 и 34 появляются нули, которые поступают на вторые сбросные входы триггеров 25 и 26, они перебрасываются в противоположное состояние, а выработанные ими нули отключают через третью и четвертую схемы И 27 к 28 реле 29 и 30 включения двигателей пневмонасоса. Датчики 19 и 23 вращения вырабатывают на своих выходах нули, которые, попав на входы элемента 2 ИЛИ-НЕ 35, вырабатывают на его выходе логическую единицу, которая поступает на первый вход пятой схемы И 36. Одновременно задержанная на время опускания заслонки в схеме задержки 37 логическая единица поступает на второй вход пятой схемы ИМПЛИКАЦИЯ 41.
Далее схемы 24 и 41, шифраторы 39 и 42, передающее устройство 40 срабатывают аналогично описанному, т. е., если за время, отведенное на опускание заслонки, она опустится - будет передан сигнал «Команда исполнена, а в случае, если к моменту окончания времени, отведенного на опускание заслонки, она не будет опущена (т. е. не сработают концевые выключатели датчиков 11, свидетельствующие о фиксации заслонки в нижнем положении, и двигатели будут продолжать работать, в этом случае будет передан сигнал «Команда не выполнена.
Датчик 43 горизонтального положения заслонки, третий 44 и четвертый 45 триггеры и схемы И 27, 28 предназначены для поддержания заслонки в горизонтальном положении ее подъеме или опускании путем
отключения соответствующего насоса левого или правого отсека заслонки до момента фиксации «Горизонтальное положение. На фиг. 5 продемонстрирован принцип работы
датчика горизонтального положения.
В горизонтальном положении реле левого отсека PI датчика 43 и реле правого отсека Р2 датчика 43 горизонтального положения заслонки включены через контакты Ki и К2,
так как заполненная до середины емкость, например, ртутью, обеспечивает замыкание этих контактов. Через соответственно замкнутые контакты появления крена одно из реле выключается. Так, на фиг. 56 при занижении левого отсека обесточивается реле РЗ и напряжение появляется на выходе 4 вместо выхода 3 или на выходе 2 вместо выхода 1 (в случае занижения правого отсека заслонки).
Если, например, при подъеме заслонки
Q правая часть заслонки поднимается быстрее, напряжения на выходе 3 и 4 датчика горизонтального положения поменяются и станет на выходе 3 - нуль, а на выходе 4 - логическая единица. Это изменение переводит четвертый триггер 45 (фиг. 3) в проти5 воположное состояние и на его выходе появляется нуль, который, поступив на вход первой схемы И 16, вызывает отключение пневмонасоса 4 правой полости заслонки, работающего на нагнетание воздуха. Первый пневмонасос продолжает работать и в тот момент, когда заслонка принимает горизонтальное положение, значение напряжений на третьем и четвертом выходах датчика 43 изменяется на первоначальное (на выходе 3 датчика - единица, на выходе 4 - нуль), триггер 45 возвращается также в первона- чальное положение и пневмонасос правого отсека заслонки включается для совместной работы с левым пневмонасосом для дальнейшего подъема заслонки.
0 При опускании заслонки, например, при аналогичном перекосе заслонки появившийся нуль на третьем выходе датчика 43 поступает на вход третьей схемы И 27, что меняет логическую единицу на выходе этой схемы на нуль. В результате реле 29 обес5 точивает электропривод и пневмонасос перестает откачивать воздух из левого отсека заслонки. Продолжающий работать электропривод 22 с помощью его пневмонасоса продолжает откачивать воздух из правого отсека, его обесточивает выравнивание заслонки, что приводит к изменению напряжения на выходах 3 и 4 датчика в первоначальное состояние, после чего оба насоса продолжают откачивать воздух, обеспечивая равномерное опускание заслонки. Таким образом,
5 наличие датчика горизонтального положения исключает возможность перекоса и заклинивания заслонки в направляющих, т. е. осуществляется постоянное поддержание за0
0
слонки в горизонтальном положении при подъеме и спуске заслонки. Кроме того, в процессе автоматического дистанционного управления по радио положением заслонки осуществляется индикация на пункте управления выполнения или невыполнения команд подъема и опускания заслонки.
Высота подъема заслонки выбирается с целью обеспечения превышения верхней кромкой заслонки максимально возможного подъема уровня 8 воды с любой стороны от ворот.
В опущенном положении заслонки при нахождении ее в нище обеспечивается беспрепятственный проход плавсредств через ворота плотины над заслонкой.
Возможное засорение ниши 7 песком или илом устраняется регулярным (дежурным) подъемом заслонки, удалением со дна нищи ила или песка с помощью специальной гидросистемы 6 прокачки в нижней части нищи и конструкцией заслонки, которая в крайнем верхнем положении не выдвигается полностью из нищи, а в крайнем нижнем положении верхний край заслонки не опускается ниже верхней части нищи.
Эффективность применения предлагаемой системы управления заслонкой плотины состоит в обеспечении судоходства при открытой плотине, в резком снижении требований к механической прочности опор за счет исключения вертикального давления заслонки на опоры при ее перемещении и «зависании в любом положении, а также в существенном уменьшении энергетических затрат на подъем и опускание заслонки, так как электроэнергия тратится только на подачу воздуха во внутренние полости заслонки, а уже воздух обеспечивает подъемную силу для удержания и подъема заслонки. Снижение требований к механической прочности опор благодаря плавучести заслонки приводит к снижению затрат на создание плотины и ее эксплуатации. Исключение возможных случаев заклинивания заслонки при подъеме и опускании обеспечивается системой автоматического поддержания заслонки в горизонтальном положении благодаря введению датчика горизонтального положения и разделению заслонки на два одинаковых отсека. Автоматическое дистанционное управление положением заслонки позволяет одновременно управлять несколькими плотинами с единого пульта управления системой плотин.
Формула изобретения
1. Система управления заслонкой плотины, включающая заслонку, установленную в направляющих опор и выполненную в виде герметичной полости, электроприводной исполнительный механизм, выход которого соединен с внутренней полостью заслонки, и датчик вертикального положения заслонки.
подключенный к усгройству дистанционного управления исполнительным механизмом, отличающаяся тем, что, с целью повышения качества и надежности управления, система снабжена датчиком горизонтального положения заслонки, подключенным к устройству дистанционного управления исполнительным механизмом управления заслонки, выполненной с двумя одинаковыми герметич- ными полостями, реле накачки и реле откачки каждой из полостей заслонки, подключенных к четырем входам устройства дистанционного управления исполнительным механизмом, выполненным в виде двух электроприводных реверсивных насосов откачки 5 и накачки воды в соответствующие полости заслонки, причем датчик вертикального положения заслонки выполнен в виде двух пар концевых выключателей крайнего верхнего и крайнего нижнего положений заслонки, установленных на направляющих опор. 2. Система по п. 1, отличающаяся тем, что устройство дистанционного управления исполнительным механизмом заслонки выполнено в виде приемника команд управления с подключенными к нему дещифраторами 5 подъема и опускания, выход первого из которых подключен через первую и вторую схемы И к реле накачки каждой из полостей заслонки, а выход второго подключен к счетным входам первого и второго триггеров, а также третьей и четвертой схем И, входы 0 которых подключены к выходам первого и второго триггеров, а выходы - к реле откачки каждой из полостей заслонки, третьего и четвертого триггеров, счетные входы которых подключены к первой паре противофазных выходов датчика горизонтального поло- 5 жения заслонки и к вторым входам третьей и четвертой схем И, а выходы - к вторым входам первой и второй схем И, схемы НЕ, вход которой подключен к дещифратору опускания, а выход - к третьим входам пер- 40 вой и второй схем И, пятой схемы И, первый вход которой подключен через схему 2ИЛИ- НЕ к датчикам вращения насосов откачки и накачки, а второй вход через схемы задержки - к дешифраторам опускания и подъема, схемы ИМПЛИКАЦИЯ, входы ко- 45 торой подключены к выходу пятой схемы И и к ее второму входу, и двух щифраторов, выходы которых подключены к передающему устройству, а входы - к выходу пятой схемы И и к выходу схемы ИМПЛИКАЦИЯ, причем четвертые входы первой и второй 50 схем И подключены к двум датчикам крайних верхних положений полостей заслонки, обнуляющие входы первого и второго триггеров подключены к двум датчикам крайних нижних положений полостей заслонки, а eg обнуляющие входы третьего и четвертого триггеров - к второй паре противофазных выходов датчика горизонтального положения заслонки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой бункеров | 1978 |
|
SU747795A1 |
| Устройство для управления загрузкой бункеров | 1990 |
|
SU1738744A1 |
| Устройство для дозированного кормления животных | 1986 |
|
SU1442150A1 |
| Система управления доковыми операциями | 1984 |
|
SU1257617A1 |
| Устройство для штабелирования и разборки штабеля листовых изделий | 1988 |
|
SU1708724A1 |
| СИСТЕМА УПРАВЛЕНИЯ ШАГАЮЩИМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1990 |
|
RU1739607C |
| Устройство для сварки давлением | 1988 |
|
SU1532244A1 |
| Микропроцессорное устройство управления горизонтальным затвором с электромеханическим приводом для загрузки железнодорожных вагонов | 1991 |
|
SU1837042A1 |
| Устройство для заливки расплава в формы | 1984 |
|
SU1225684A1 |
| Устройство для разделения компонентов картофельного вороха | 1985 |
|
SU1358818A1 |
Изобретение относится к сельскохозяйственному водоснабжению и может быть использовано при создании плотин с автоматическим дистанционным управлением положением их заслонок. Цель изобретения - повышение качества и надежность управления заслонкой плотины. Система управления заслонкой плотины включает устройство дистанционного управления исполнительным механизмом заслонки, выполненным в виде пневмонасосов подачи сжатого воздуха в правую и левую герметичные полости заслонки, датчика ее горизонтального положения и датчиков ее крайнего верхнего и крайнего нижнего положений и направляющих опор, в которых перемещается заслонка. Устройство дистанционного управления имеет в своем составе приемник команд с диспетчерского пункта и передающее устройство, а также датчики вращения электроприводов пневмонасосов, триггеры и логические схемы И, НЕ, 2 ИЛИ-НЕ и ИМПЛИКАЦИЯ. ПОДЪЕМ И ОПУСКАНИЕ ЗАСЛОНКИ ПРОИЗВОДИТСЯ БЕЗ ДОПОЛНИТЕЛЬНЫХ МЕХАНИЧЕСКИХ ВОЗДЕЙСТВИЙ НА ОПОРЫ ПУТЕМ НАГНЕТАНИЯ В ПОЛОСТЬ ЗАСЛОНКИ ВОЗДУХА С ПОМОЩЬЮ ПНЕВМОНАСОСОВ И ВЫТЕСНЕНИЯ ВОДЫ, А ОПУСКАНИЕ ПУТЕМ ОТКАЧКИ ВОЗДУХА И ЗАТОПЛЕНИЯ ПОЛОСТИ ЗАСЛОНКИ ВОДОЙ. ЭТО ПОЗВОЛЯЕТ ИСКЛЮЧИТЬ СПЕЦИАЛЬНЫЕ МЕХАНИЧЕСКИЕ УСТРОЙСТВА ОПУСКАНИЯ И ПОДЪЕМА ЗАСЛОНКИ И УДЕРЖАНИЯ ЕЕ НАД ПОВЕРХНОСТЬЮ ВОДЫ ПРИ ОТКРЫТЫХ ВОРОТАХ ПЛОТИНЫ. РАЗДЕЛЕНИЕ ВНУТРЕННЕЙ ПОЛОСТИ ЗАСЛОНКИ НА ПРАВУЮ И ЛЕВУЮ ПОЛОВИНЫ ПОЗВОЛЯЕТ УСТРАНИТЬ ПЕРЕКОСЫ ЗАСЛОНКИ ПРИ ЕЕ ПЕРЕМЕЩЕНИИ. ЭТО ДОСТИГАЕТСЯ УБАВЛЕНИЕМ ИЛИ ДОБАВКОЙ КОЛИЧЕСТВА ВОЗДУХА, ПОДАВАЕМОГО В СООТВЕТСТВУЮЩУЮ ПРАВУЮ ИЛИ ЛЕВУЮ ПОЛОСТИ ЗАСЛОНКИ. 1 З.П.Ф-ЛЫ, 5 ИЛ.
;«
4
т/Пл
11
тщ
57
38
Фиг.
,П
г/
с.
Опора
5ac/JOHf(o
/
29
18
19
г1
с
- 30
гг
Lf
тщИ
Опора
Фиг.
i
| Глубинный затвор | 1981 |
|
SU1020497A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
