Изобретение относится к вибротранс- Ьортной технике и может быть использовано автоматизации транспортно-погрузоч- |ных операций, и в частности в загрузочно-до- ирующих устройствах в горной, металлургической, строительной и других фтраслях промышленности.
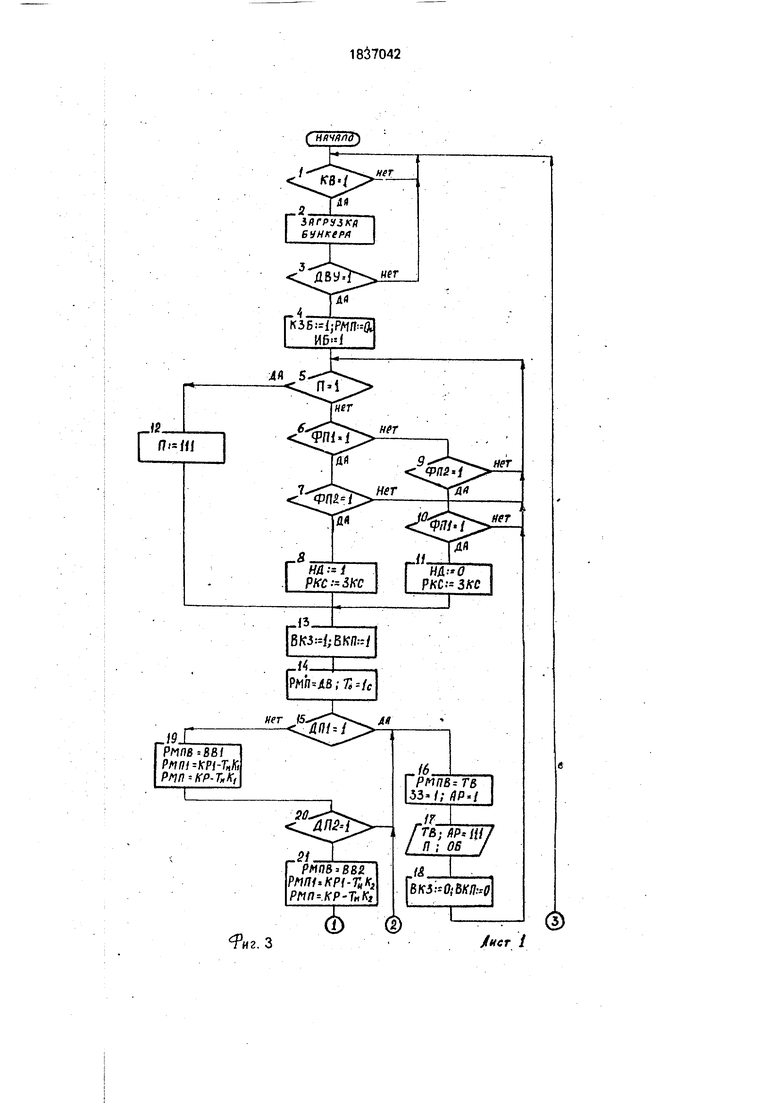
Целью изобретения является повышение точности отпуска дозы сыпучего матери- лла, расширение области применения устройства и повышение надежности рабо- ы устройства при его работе, как в ручном |ак и в автоматическом режиме. I На фиг.1 представлена конструктивная Јхема горизонтаьного затвора с электромеханическим приводом установлены на бункере накопителе; на фиг.2 - функциональная схема микропроцессорного устройства управления горизонтальным затвором с электромеханическим приводом для загрузки железнодорожных вагонов; на фиг.З - графическая схема алгоритма работы микропроцессорного устройства управления горизонтальным затвором с электромеханическим приводом для загрузки железнодорожных вагонов.
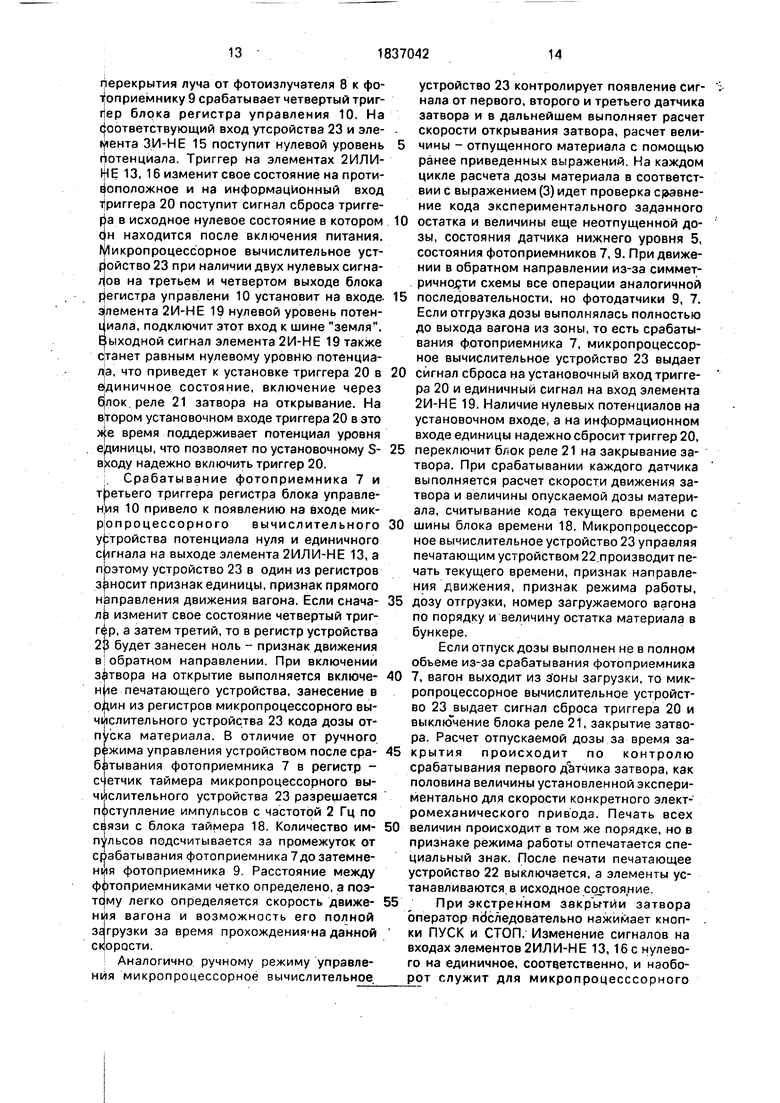
Конструктивная схема горизонтального электромеханического затвора состоит из бункера-накопителя сыпучего материала 1 .имеющего в нижней -части течку, установленную под углом 65...75° к горизонту, что обеспечивает свободное истечение материСл
Ч
О
JSk
hO
ала из бункера. В нижней части течки установлены направляющие под угол 3...50 к горизонту, а на них горизонтальный затвор, который может совершать возвратно-поступательное движение перекрывая отверстие течки, а следовательно и обеспечивать истечение сыпучего материала или его перекрытие,С помощью металлоконструкции к течке прикреплен винтовой моторный привод, обеспечивающий возвратно-поступательное движение затвора по направляющим с помощью выдвижного штока. Свободное перемещение затвора и предохранение его от заклинивания обеспечивают ролики, которые перемещаются в направляющих. При выполнении ремонтных работ и в аварийной ситуации сечение течки можно перекрыть с помощью шибера. Одновременно с .горизонтальным движением затвора с помощью тяг можно обеспечить движение шибера перекрывающего сечение течки синхронно.
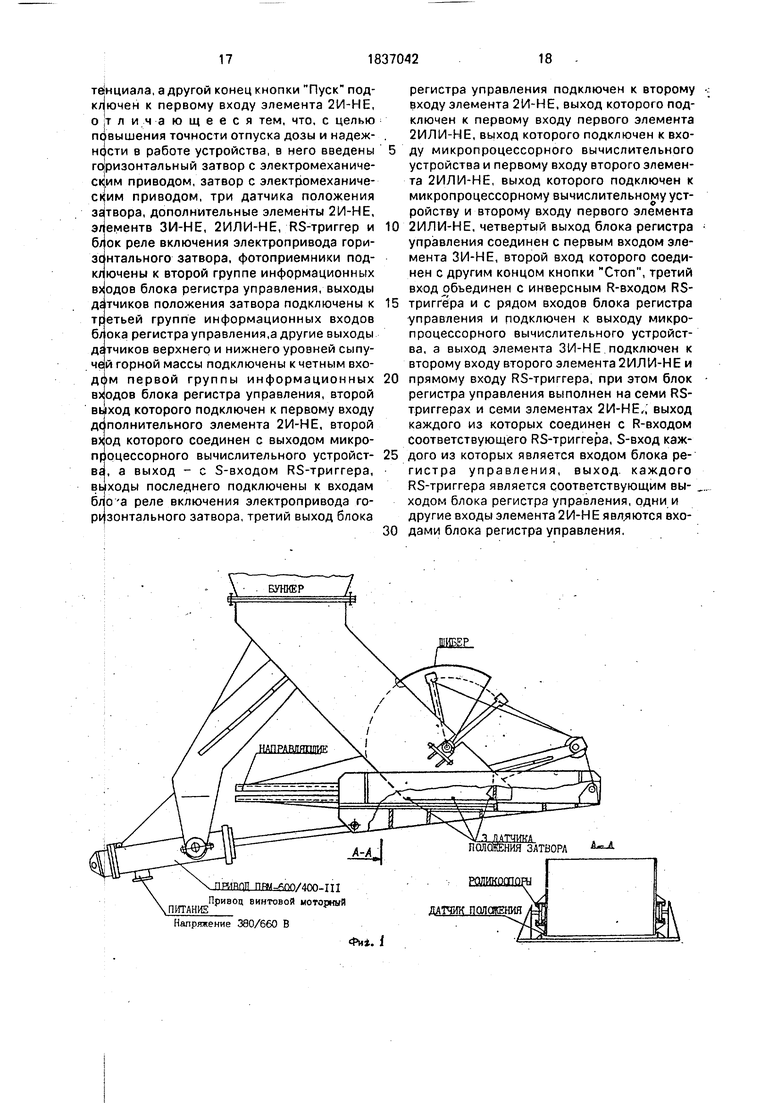
Функциональаня схема устройства управления горизонтальным затвором с электромеханическим приводом содержит бункер-накопитель 1 сыпучей.горной массы фракции 5...30 мм, под которым установлен горизонтальный затвор 2 с электромеханическим приводом перекрывающий или открывающий отверстие течки для свободного истечения материала в железнодорожный вагон 3. Для определения граничных значений сыпучего материала в бункере на нем установлены гамма-излучатели с гамма; датчиками 4 и 5 соответственно верхнего и нижнего (предельного) уровня материала в бункере. На срезе течки в плоскости дви- жбнния горизонтального затвора установлены три контактные датчика положения затвора, Два датчика положения установлены по горизонтальному срезу течки на расстоянии 5 мм от внешней стенки течки, а один точно посередине по длине течки и на одинаковом расстоянии от крайних положений затвора. При закрытом затворе все три датчика положения замкнуты, то есть находятся в исходном состоянии. По ходу движения вагона (по горизонтали) установлены, соответственно, инфракрасный излучатель 6 и фотоприемник 7, а также на расстоянии 2,4 м от перечисленных инфракрасный фо- тоиздучатель 8 и фотоприемник 9. Фотоизлучателиифотоприемникиустанавливаются по отношению друг друга перпендикулярно и на высоте 50...70 см от верхнего ббрта вагона. Фотоизлучатели 6, 3 установлены по одной стороне пути, а фотоприемники 7, 9 с другой. Фотоизлучатель 6 установлен на расстоянии (по горизонтали)
1 м от среза течки закрытой затвором, а фотоизлучатель 8 на расстоянии также 1 м . после среза течки при движении вагона слева направо, так как истечение сыпучего материала с течки происходит по вертикали. При заполненном бункере, закрытом затворе и отсутствии железнодорожного вагона между лучами фотоизлучателей датчики 4, 5, три датчика положения затвора и фотоприем0 ники 7, 9 находятся в исходном состоянии, а их выходы (пары связей) подключены к боку регистра управения 10. Он реализован на семи RS-триггерах с прямыми S и инверсными R-входами, а также на семи двухвхо5 довых логических элементах 2И-НЕ, выходы которых, соответственно, подключены на R- входы триггеров блока регистра управления. Верхние выходы датчиков уровня 4 и 5, левые выходы фотоприемников 7, 9 и пра0 вые выходы трех датчиков положения затвора подключены к S-входу, соответственно, первого...седьмого триггера блока регистра управления. Нижний выходы датчиков уровня 4, 5, правые выходы фотоприемников 7,
5 g и левые выходы трех датчиков положения подключены, соответственно, на первые входы первого,..седьмого логического элемента 2И-НЕ блока регистра управления 10. Кнопка ПУСК 11, вторым контактом подклю0 чена на второй вход восьмого логического двухвходового 2И-НЕ элемента 12, выход которого подключен на первый вход первого логического двухвходового 2ИЛ И-Н Е элемента 13. Кнопка СТОП 14, как и кнопка
5 ПУСК 12 первым контактом подключена к . шине земля (общая шина прибора), а вторым на второй вход логического трехвходо- . вого 2И-НЕ элемента 15, выход которого подключен на второй вход второго логиче0 ского двухвходового 2ИЛИ-НЕ элемента 16. Выход элемента 13 подключен на первый вход элемента 16, а его выход подан на второй вход элемента 13. Блок индикации текущего времени суток с помощью инфор5 мационной шины подключен к блоку таймера 18, а к первому входу девятого логического двухвходового 2И-НЕ элемента
19подключен второй выход (прямой выход второго триггера) блока регистра управле0 Ния 10..Выход этого элемента подключен к инверсному S-входу восьмого RS-триггера
20с прямым и инверсным R-входами объединенными по логической операции ИЛИ. Прямой и инверсный выходы триггера 20
5 подключены к блоку реле 21 включены электропривода. Два выхода блока реле подключен ы к электромеханическому приводу горизонтального затвора 2. Печатающее устройство 22 с помощью управляющей связи и информационной шины подключено к
микропроцессорному вычислительному устройству 23, к которому подключен с помощью одной информационной шины и двух управляющих связей блок таймера 18, одной связью элемент 2И-НЕ 19, двунаправленной шиной блок24 задания величины отгускаемой в вагон дозы сыпучего матери- двунаправленной шиной и управляю- связью клавишный пульт управления
алг ще 25, блс хо/:
ДУ. пос
выходы элементов 13 и 16, семь выходов ка регистра управления 10 (прямые вы- ы RS-триггеров). К управляющему выхо- установки схемы в исходное состояние ле цикла работы, микропроцессорного вычислительного устройства 23 подключены инверсный R-вход триггера 20, третий вхсд элемента 15, вторые входы первого...седьмого элементов 2И-НЕ блока регистра управления 10, четвертый выход которого подключен к первому входу элемента 15, выход которого также подключен к прямому R-входу триггера 20.
Предлагаемое устройство работает сле- образом.
В исходном состоянии бункер-накопи- телЬ 1 заполнен сыпучей горной массой, затвор закрыт и между осветителями и фотоприемниками отсутствует железнодорожный вагон. Исходные программы работы устройства в ручном и автоматическом режиме отпуска дозы сыпучего материала за- несэны в программируемые запоминающие микросхемы, которые вставлены в розетки микропроцессорного вычислительного устройства 23. При полностью заполненном бункер гамма датчики 4 и 5 выключены, что приводит к наличию на верхнем выводе единичного потенциала, а на нижнем нулевого. Так: как верхний выход датчиков 4 и 5 подключен к S-входу триггера один и два блока регистра управления 10, то это приводит к том/, что эти триггеры будут в единичном, состоянии и их выходные сигналы с прямых выходов, соответственно, поданы- на вход интерфейса микропроцессорного вычислительного устройства 23 и вход логического элемента 2И 19. С нижнего вывода датчика 4 и 5 на первый вход элемента 2И-НЕ блока регистра управления подается нулевой поенциал, а на второй вход с выхода микро- прсцессорного вычислительного стройства подан единичный уровень сиг- нали. На выходе элемента 2И-НЕ блока регистра управлени 10 установится диничный потенциал на который йнверс- ный R-вход RS-триггера не реагирует. Ана- огй чным образом на всех входах триггеров лока управления 10 будут установлены поенциалы единицы и нуля от фотоприемников 7, 9 и трех датчиков положения затвора.
На всех семи выходах блока регистра управ- .: ления 10 будут установлены единичные потенциалы, которые подаются на входы микропроцессорного вычислительного уст- 5 ройства 23, первый вход элемента 2И-НЕ 19, первый вход элемента 2И-НЕ 12 и элемента ЗИ-НЕ 15. Единичный потенциал по связи сброса с выхода микропроцессорного вычислительного устройства 23 кроме подачи
10 на входы семи схем 2И-НЕ блока регистра . управления 10 подается на вход элемента ЗИ-НЕ 15 и инверсный R-вход триггера 20. На обеих входах элемента 2И-НЕ 12 будет единичный потенциал, а поэтому на выходе
15 установится потенциал нуля, который подается на первый вход элемента 2ИЛИ-НЕ 13. . На всех трех входах элемента 2И-НЕ 15 также единичный потенциал, а поэтому на его выходе будет также нулевой потенциал, ко0 торый подается на второй вход элеменат . 2ИЛИ-НЕ 16 и прямой R-вход триггера 20. На первом входе элемента 2И-НЕ 19 со второго выхода блока регистра управления 10, то есть потенциал определяемый гамма-дат5 чиком нижнего уровня 5, установится единичный потенциал.. На второй вход элемента 2И-НЕ 19 с выхода микропроцессорного вычислительного устройства 23 подается также единичный потенциал, а
0. поэтому на выходе элемента 19 будет единичный потенциал (схем И - на входе два единицы), который подается на инверсный S-вход триггера 20. С выхода блока таймера 18 по информационной шине подаются на
5 вход микропроцессорного вычислительного устройства 23 в двоичном коде сигнала соответствующие текущему времени при по- . даче разрешающего сигнала с устройства 23. По одной из связей на вход микропро-
0 цессорного вычислительного устрйоства 23 подается частота, например, 2 Гц которая обеспечивает интервалы времени 0,5 с. При . включении питания оператор обязан сразу же нажать кнопку СТОП 14, что приведет к
5 установке триггера 20 по установочному R- входу в нулевое состояние, то есть блок реле 21 установится в исходное состояние. Питание на электропривод затвора 2 не подается, так как на прямом выходе триггера 20
0 нулевой потенциал. Нажатие кнопки СТОП 14 приводит к замыканию контактов 1 и 2, то есть на вход элемента Е 15 подается нулевой потенциал, а на его выходе установится единичный, Этот потенциал приводит
5 элемент 2ИЛИ-НЕ 16 в нулевое состояние, а по обратной связи с его выхода элемент 2ИЛИ-НЕ 13 в единичное состояние. За счет обратных связей это состояние устойчиво. На вход микропроцессорного вычислительного устройства 23 в исходном состоянии с выхода элемента 13 подается единица, а с выхода элемента 16 ноль. На блоке задания дозы 24 отпуска материала набираем десятичный код отпускаемой порции, который может быть считан в память микропроцессорного вычислительного устройства по шине. Блок индикации 17 текущего времени суток индуцирует с помощью однострочного десятичного дисплея время суток. Устройство в исходном состоянии.
Работа устройства в ручном режиме. На клавишном пульте управления 25 набираем начальный адрес пуска программы. Выполняем запуск программы: Микропроцессорное вычислительное устройство 23 в режиме ожидания анализирует сигналы блока регистра управления 10 и выходные сигналы элементов 2ИЛИ-НЕ 13, 16. Выходные сигналы фотоприемников 7 и 9 в ручном режиме отсутствуют из-за их отключения и микропроцессорное вычислительное устройство 23 отпуск дозы по ним не производит. При входе вагона в зону подачи сыпучего материала оператор нажимает кнопку ПУСК. На выходе элемента 2И-НЕ 12 установится единичный потенциал, который установит элемент 2ИЛИ-НЕ 13 в нулевое состояние, а элемент 2ИЛИ-НЕ 16 в единичное. Такое изменение сигналов на входе микропроцессорного вычислительного уст- ройства 23 приводит к запуску программы работы. Единичный потенциал на первом выходе блока регистров управления 10 приводит к занесению в рабочий регистр процессора код, соответствующий емкости бункера. Единичное состояние второго выхода блока регистров управления 10 приводит к считыванию кода отпускаемой дозы в вагон с шины блока 24. Микропроцессорное вычислительное устройство 23 по управля- ющей связи включает печатающее устройство 22 и подачей нулевого импульса на второй вход элемента 2И-НЕ 19 приводит к тому, что на инверсном S-входе триггера 20 установится нулевой уровень потенциала заданной длительности. Установка триггера 20 в единичное состояние приводит к включению блока реле 21, который выдаст код включения силового напряжения электропривода горизонтального затвора 2 по двум линиям связи. Происходит прямое включение электропривода, винтовой шток электропривода втягивается. Наличие парафазного выхода триггера 20 позволяет повысить надежность срабатывания блока реле 21 управления электроприводом. Электропривод будет работать до полного втягивания штока после чего срабатывает внутренний концевой переключатель, то есть срабатывает блокировка втягивания.
Шток электропривода находится во втянутом состоянии до тех пор, не будет замкнута линия блокировки прямого включения, то есть за счет замыкания контактов реле блока 21 подается сигнал обратного хода-вы- талкивание штока. Так как ранее разомкнутая линия связи будет замкнута, то ее другая фаза - разомкнута, снят сигнал прямого включения.Выталкивание штока - закрытие затвора, приводит к прекращению подачи материала. Но режим закрытия затвора возможен, когда триггер 20 изменит свое состояние по сигналу блока р егистра управления 10 или сигнала с элемента 2И- НЕ 15, или сигнала от микропроцессорного вычислительного устройства 23.
Установка триггера 20 в единичное состояние включает блок реле 21,а он включает электропривод на открывание затвора. Микропроцессорное вычислительное устройство 23 в течении 1 секунды начинает контролировать состояние одного из триггеров блока регистра управления 10, состояние первого датчика положения заслонки затвора. Если исходное единичное состояние датчика за это время не изменится, то микропроцессорное вычислительное устройство 23 выдаст сигнал закрытия затвора, считает в регистр микропроцессора текущее время с шины блока таймера и выдаст на печать сигнал АВАРИЯ, текущее время, остаток в бункере, выключит печатающее устройство 22, сбрасывает триггер 20 и триггер на элементах 2ИЛИ-НЕ 13, 16.
Если после включения электропривода ранее 1 секунды происходит изменение состояние выхода седьмого триггера блока регистра управления 10, то устройство 23 выполняет следующие операции: один из регистров микропроцессора заносит с шины блока таймера 18 значение текущего времени; считает во второй регистр микропроцессора количество импульсов с частотой 2 Гц поступающих по связи с блока таймера 18 за промежуток времени до срабатывания второго датчика положения заслонки затвора. Количество импульсов сужит для расчета скорости открывания затвора, так как расстояние между датчиками четко определено. Выполняя счет импульсов с частотой 2 Гц устройство 23 опрашивает выход сигнала шестого триггера блока регистра управления 10, то есть состояние второго датчика положения затвора. При его срабатывании происходит изменение сигнала с единичного на нулевой, устройство 23 уже в другой регистр микропроцессора заносит количество импульсов поступающих с блока таймера 18. Эта операция выполняется до срабатывания третьего датчика заслонки затвора - полное отрывание затвора. О срабатывании этого дат- чиха сигнализирует изменение сигнала .с единичного на нулевое на пятом выходе блока регистар управления 10, контроль кото эого выполняет устройство 23. Количество импульсов считанное за промежуток времени от изменения сигнала на выходе пятого триггера до изменения сигнала на вь ходе шестого триггера блока регистра управления 10 служит для расчета скорости движения заслонки затвора. Полученные количества импульсов служит для расчета гравитационного истечения материала за время открывания затвора, так как в регистры микропроцессора занесены величины оЈ щего объема сыпучего материала в бункере и величины общего объема сыпучего материала в бункере и величины отпускаемой дезы. Расход сыпучего материала при открывании затвора можно описать выражениями
ч
Gi KyRrb J vi (t)dt,
12
G2 К у Rrb / v2 (t) dt, ч
гДе Gi - расход сыпучего материала при открывании затвора в промежутке времени от срабатывания первого до второго датчи- к затвора.;
| К - постоянная, зависящая от физических свойств сыпучего материала; . : у-объемный вес сыпучего материала; Rr гидравлический радиус выпускного отверстия;
: Ь- длина поперечного сечения окнатеч- ки;
i vi(t) - скорость движения затвора от первого до второго датчика;
| G2 - расход сыпучего материала при открывании затвора в промежутке времени о| срабатывания второго до третьего датчика затвора;
V2(t) - скорость движения затвора от второго до третьего датчика.
Устройство 23 одновременно с анали- з|)м состояния датчиков затвора выполняет р.зсчет расхода сыпучего материала, уменьшает содержимое регистров содержащих код емкости бункера и код отпускаемой дозы. После полного открывания затвора на- чмнается гравитационное истечение материала, которое можно описать выражение
G3 KyRrFt3,(3)
где Сз - расход сыпучего материала при полностью открытой течке;
F - площадь сечения выпускного окна; 1з - время полного открытия затвора. 5Время т.з легко определяется подсчетом
числа импульсов поступающих от блока таймера 18 на вход устройства 23. Расчет величины Оз выполняется поэтапно за заданные промежутки времени. Рассчитанные вели10 чины вычитаются из заданной дозы и микропроцессорноевычислительноеустройство 23 все время контролирует остаточную величину, доза контроля будет выдана закрывании затвора. Данная доза
15 определяется экспериментальным путем учитывающим текучесть материала, поперечное сечение течки и его гранулометрический состав. При достижении величины остатка отпускаемой дозы значению вели20 чины материала рассчитанного на выпуск при закрывании устройство 23 выдает сигнал закрывания затвора, то есть сброс триггера 20 по инверсному R-входу. Этот же сигнал сброса поступает на входы схем 2И25 НЕ блока регистра управления 10 и на третий вход элемента 2И-НЕ 15. Это приводит к сбросу первого триггера блока регистра управления 10, так как датчик верхнего уровня 4 из-за опускания материала изме30 нил свое состояние, а сигнал сброса поступивший на третий вход элемента ЗИ-НЕ 15 приводит к изменению состояния триггера на элементах 2ИЛИ-НЕ 13, 16, что приведет к установке элемента 13 в нулевое состоя35 ние. В то же время сигнал с выхода элемента ЗИ-НЕ 15 повторно поступит на прямой R- вход триггера 20, что повторно подтвердит его сброс. Двойной сброс триггера увеличивает надежность работы исполнительной
40 части устройства.
После подачи сигнала закрытия затвора устройство 23 в обратном порядке контролирует закрытие по срабатыванию датчиков 45 затвора три, два, один. Объем материала вытекающего при закрывании затвора определяется выражениями
14
50 GA К у Rr b / V3(t) dt,
t3
(4)
Gs RyRrb
J V4(t)
14
dt,
(5)
где G4 - расход сыпучего материлаа при закрывании затвора в промежутке времени срабатывания от третьего до второго датчика;
Gs расход сыпучего материала при закрытии затвора в промежутке времени срабатывания от второго до первого датчика;
V3(t), V4(5) - скорость закрывания затвора соответственно от третьего до второго и от второго до первого датчика затвора.
Расчет величин сыпучего материала выданного при закрывании выполняется одновременно с контролем состояния датчиков затвора, срабатывание первого датчика затвора, служит устройству 23 сигналом для повторного считывания текущего времени с шины блока таймера 18 в один из регистров микропроцессора. В дальнейшем выполняется печать текущего времени считанного вначале и в конце отпуска дозы, признака сигнала режима ПУСК, дозы отпуска, номера вагона загрузки, величины остатка в бункере. Печать выключается.
Если при отпуске дозы в вагон, оператор нажимает кнопки СТОП, то на выходе элемента ЗИгНЕ 15 установится единичный потенциал, Он установит по R-входу триггер 20 в нулевое состояние, начинается закрытие затвора. Элемент 2ИЛИ-НЕ 16 установится в единичное состояние, а по обратной связи элемент 2ИЛИ-НЕ 13 в нулевое, на входе микропроцессорного вычислительного устройства будет сигнала СТОП. Начинается контроль закрытия затвора, расчет величины материала отпущенной в вагон и печать результата.
Если при работа устройства до полной отгрузки дозы произойдет срабатывание датчика нижнего уровня 5, материал опу; стился ниже допустимого уровня, выдается сигнал на загрузку бункера и закрытие затвора. В этом случае устройство 23 при обнаружении нулевого уровня на втором выходе блока регистра управления 10 сбрасывает триггер 20 в нулевое состояние и выдает сигнал сброса на схемы 2И-НЕ блока регистра управления 10 и элемент ЗИ-НЕ 15.
После срабатывания первого датчика закрывания затвора выполняет расчет отпущенной дозы и печать результатов,а затем выключение печати.
Устройство управления горизонтальным затвором с электромеханическим приводом для загрузки железнодорожных вагонов после отпуска дозы и печати результатов в ручном режиме переходит в режим ожидания сигнала ПУСК и датчиков устройства.
Работа устройства управления в автоматическом режиме отпуска дозы.
На клавишном пульте управления 25 устройства 23 набираем начальный адрес пуска программы анализа входных сигналов
внешних датчиков и режима работы. Подаем питающее напряжение на инфракрасные фотоизлучатели 6,8 и фотоприемники 7, 9. Бункер-накопитель полностью загружен
горной массой. Между фотоизлучателями и фотоприемниками отсутствует железнодорожный вагон и лучи света освещает фотоприемники, а их выходные сигналы устанавливают триггеры 3, 4 блока регистра
0 управления 10 в исходное единичное состояние. Выходные единичные сигналы триггеров с выхода три и четыре блока 10 поступают на входы устройства 23 и на входы элементов 2И-НЕ 12 и ЗИ-НЕ 15. Наличие
5 этих сигналов на входах элементов выходные сигналы их не меняет. Устройство готово к работе в автоматическом режиме.
Выполняется пуск программы работы устройства. Микропроцессорное вычисли0 тельное устройство 23 после пуска программы анализирует входные сигналы, то есть выходы всех триггеров блока регистра управления 10 и выходы элементов 2ИЛЙ-НЕ 13, 16. Сигнал ручного режима ПУСК отсут5 ствует в начальный момент пуска устройства, то при наличии единичного сигнала с выхода первого триггера блока регистра управления 10 в регистр микропроцессора будет занесен код соответствующий емкости
0 бунера, Анализ сигнала со второго выхода блока регистра 10 выполняется постоянно. Его.нулевое состояние свидетельствует о срабатывании датчика нижнего уровня 5, величины материала в бункере достигла
5 предельного нерасходуемого значения и дальнейший выпуск его становится неконтролируемым из-за изменения физических свойств. Выполнив анализ этих сигналов устройство 23 анализирует сигналы на-треть0 ем и четвертом выходе блок регистра 10, то есть выходы сигналов фотоприемников.
Железнодорожный вагон движется в прямом направлении, от фотоприемника 7 к фотоприемнику 9. При входе борта вагона в
5 зону луча от излучателя 6 происходит перекрытие его и затемнение фотоприемника 7. На его выходах сигналы изменятся на противоположные, сработает третий триггер блока регистра 10. Появление нулевого сиг0 нала нд выходе блока 10 приводит к его подаче на вход устройства 23 и на первый вход элемента 2Й-НЕ 12, что в свою очередь установит триггер на элементах 2ИЛИ-НЕ 13, 16 в единичное состояние, которое соот5 ветствует сигналу ПУСК. Микропроцессорное вычислительное устройство 23 при наличии таких сигналов начинает анализ четвертого выхода блока регистра управления 10, анализируется состояние фотодат- чика 9. При входе борта вагона в зону
перекрытия луча от фотоизлучателя 8 к фо- т}оприемнику 9 срабатывает четвертый триггер блока регистра управления 10. На соответствующий вход утсройства 23 и элемента ЗИ-НЕ 15 поступит нулевой уровень потенциала. Триггер на элементах 2ИЛИ- fjlE 13, 16 изменит свое состояние на проти- ёоположное и на информационный вход триггера 20 поступит сигнал сброса тригге- в исходное нулевое состояние в котором сн находится после включения питания. Микропроцессорное вычислительное устройство 23 при наличии двух нулевых сигналов на третьем и четвертом выходе блока регистра упрэвлени 10 установит на входе, элемента 2И-НЕ 19 нулевой уровень потен- ииала, подключит этот вход к шине земля. Е.ыходной сигнал элемента 2И-НЕ 19 также станет равным нулевому уровню потенциала, что приведет к установке триггера 20 в единичное состояние, включение через фок. реле 21 затвора на открывание. На втором установочном входе триггера 20 в это |е время поддерживает потенциал уровня единицы, что позволяет по установочному S- надежно включить триггер 20.
Срабатывание фотоприемника 7 и третьего триггера регистра блока управления 10 привело к появлению на входе мик- р|о процессорно го вычислительного
У
:тройства потенциала нуля и единичного
сигнала на выходе элемента 2ИЛИ-НЕ 13, а пээтому устройство 23 в один из регистров заносит признак единицы, признак прямого направления движения вагона. Если сначала изменит свое состояние четвертый триг- , а затем третий, то в регистр устройства 2р будет занесен ноль - признак движения в обратном направлении. При включении затвора на открытие выполняется включение печатающего устройства, занесение в один из регистров микропроцессорного вычислительного устройства 23 кода дозы отпуска материала. В отличие от ручного режима управления устройством после срабатывания фотоприемника 7 в регистр - сметчик таймера микропроцессорного вычислительного устройства 23 разрешается поступление импульсов с частотой 2 Гц по СЕ язи с блока таймера 18. Количество импульсов подсчитывается за промежуток от срабатывания фотоприемника 7 до затемнения фотоприемника 9. Расстояние между фртоприемниками четко определено, а поэтому легко определяется скорость движения вагона и возможность его полной загрузки за время прохождения-на данной скорости.
Аналогично ручному режиму управления микропроцессорное вычислительное
устройство 23 контролирует появление сигнала от первого, второго и третьего датчика затвора и в дальнейшем выполняет расчет скорости открывания затвора, расчет вели- 5 чины - отпущенного материала с помощью ранее приведенных выражений. На каждом цикле расчета дозы материала в соответствии с выражением (3) идет проверка сравнение кода экспериментального заданного 0 остатка и величины еще неотпущенной дозы, состояния датчика нижнего уровня 5, состояния фотоприемников 7, 9. При движении в обратном направлении из-за симмет- рично.сти схемы все операции аналогичной 5 последовательности, но фотодатчики 9, 7. Если отгрузка дозы выполнялась полностью до выхода вагона из зоны, то есть срабатывания фотоприемника 7, микропроцессорное вычислительное устройство 23 выдает
0 сигнал сброса на установочный вход триггера 20 и единичный сигнал на вход элемента 2И-НЕ 19. Наличие нулевых потенциалов на установочном входе, а на информационном входе единицы надежно сбросит триггер 20,
5 переключит блок реле 21 на закрывание затвора. При срабатывании каждого датчика выполняется расчет скорости движения затвора и величины опускаемой дозы материала, считывание кода текущего времени с
0 шины блока времени 18. Микропроцессорное вычислительное устройство 23 управляя печатающим устройством 22.производит печать текущего времени, признак направления движения, признак режима работы,
5 дозу отгрузки, номер загружаемого вагона по порядку и величину остатка материала в бункере.
Если отпуск дозы выполнен не в полном обьеме из-за срабатывания фотоприемника
0 7, вагон выходит из з оны загрузки, то микропроцессорное вычислительное устройство 23 выдает сигнал сброса триггера 20 и выключение блока реле 21, закрытие затвора. Расчет отпускаемой дозы за время за5 крытия происходит по контролю срабатывания первого датчика затвора, как половина величины установленной экспериментально для скорости конкретного электромеханического привода. Печать всех
0 величин происходит в том же порядке, но в признаке режима работы отпечатается специальный знак. После печати печатающее устройство 22 выключается, а элементы устанавливаются в исходное состояние.
5 При экстренном закр ытйи затвора оператор последовательно нажимает кнопки ПУСК и СТОП. Изменение сигналов на входах элементов 2ИЛИ-НЕ 13, Ненулевого на единичное, соответственно, и наоборот служит для микропроцесссорного
вычислительного устройства 23 сигналом подачи соответствующих сигналов установки на входы тригггера 20 и закрытие затвора. В дальнейшем выполняется печать результата и переход устройства в режим дежурного ожидания.
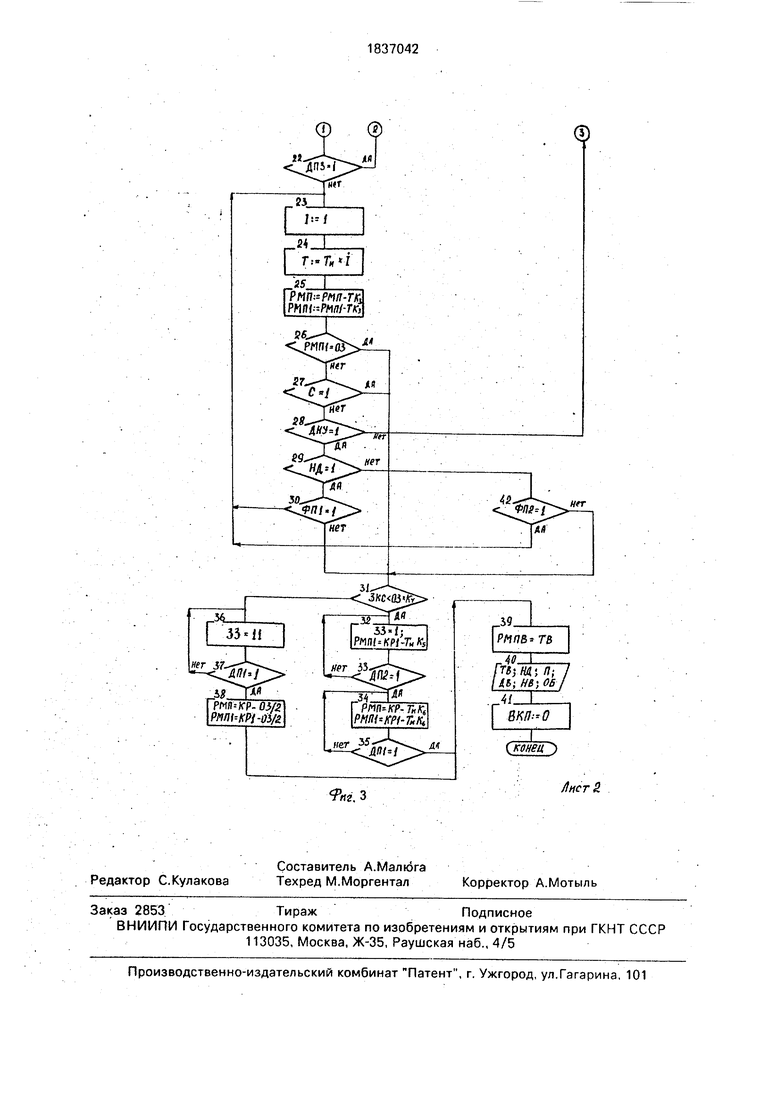
Графическая схема алгоритма работы микропроцессорного устройства управления горизонтальным затвором с электроме-- ханическим приводом приведены на рисунке 3, а также расшифрованы все условные сокращения в схеме:
KB - конвейер используемый для загрузки бункера-накопителя сыпучей горной массой;
ДВУ-датчик верхнего граничного уровня загрузки бункера-накопителя;
КЗ Б - сигнал на отключение конвейера по загрузке бункера-накопителя (конец загрузки бункера);
РМП - регистр микропроцессорного устройства в который заносится код соответствующий значению емкости бункера при его зполнении;
ТБ-сигнал индикации заполнения бунт .кера-накопителя;
П - сигнал ПУСКА устройства управления;
ФП1 - сигнал фотоприемника 1, положения вагона;
ФП2 - сигнал фотоприемника 2, положения вагона;
НД - сигнал направления движения вагона;
ВКЗ - сигнал включения открывания за: твора;
ВКП - сигнал включения печатающего устройства;
РМП1 - регистр микропроцессора устройства управления в который заносится код оответствующий величине дозы отпуска материала;
ДП1, ДП2, ДПЗ -датчики положения заслонки затвора;
АР - сигнал аварийной работы при отказе электромеханического привода или возникновения непредусмотренной ситуации; ДНУ - датчик нижнего допустимого граничного уровня остатка сыпучего материала в бункере;
То - интервал времени запаздывания для контроля начала работы электромеханического Привода и срабатывания датчика положения ДП1;
ДВ - величина дозы сыпучего материала отпускаемая в вагон;
РКС - регистр для занесения кода скорости измеренной на расстоянии между фотодатчиками;
Ти - временной интервал измерения;
К1 - коэффициент учитывающий особенности отпуска материала при открывании затвора от ДП1 до ДП2;
К2 - коэффициент учитывающий осо- бенности отпуска материала при открывании затвора от ДП2 и ДПЗ;
КЗ - коэффициент учитывающий текучесть материала при полном открытии течки;
0 03 - код остаточной дозы,учитывающий величину материала отпускаемую при закрытии затвора;
С - сигнал СТОП;
ДНУ - датчик нижнего уровня материа- 5 ла в бункере-накопителе;
К4 - коэффициент пересчета; 33 - сигнал закрытия затвора; К5, Кб - коэффициенты, учитывающие особенности истечения материала при за- 0 крытии затвора;
РМПВ - регистр микропроцессора пре- значенный для занесения значения текущего времени (ТВ);
НВ - номер вагона по порядку отпуска 5 ДВ;
ОБ - значение величины материала остающегося после отпуска дозы в бункере- накопителе;
ВВ1, ВВ2 - временная выдержка опро- 0 са сигнала датчика положения затвора.
По предварительным расчетам точность отпуска дозы сыпучего материала может быть 0,8...1%. Точность загрузки при двухстороннем отпуске дозы позволяет расчи- 5 тать экономический эффект.
Формула изобретения Микропроцессорное устройство управления горизонтальным затвором с электро- .- механическим приводом для загрузки 0 железнодорожных вагонов, содержащее два инфракрасных фотоизлучателя, два фотоприемника, датчики верхнего.и нижнего уровней сыпучей горной массы, одни выводы которых подключены к нечетным входам 5 первой группы информационных входов блока регистра управления, выходы которо- го подключены к информационным входам микропроцессорного вычислительного устройства, выходы которых подключены через 0 информационную шину и управляющую линию связи к печатающему устройству, блок задания дозы и клавишный пульт управления, подключенной через двухнаправлен- ные шины к входам микропроцессорного 5 вычислительного устройства, к которому через информационные шины и управляющие линии связи подключен таймер, соединенный с блоком индикации времени, кнопки Пуск и Стоп, одни концы которых объе- динены и подключены к шине нулевого потбнциала, а другой конец кнопки Пуск под- ключен к первому входу элемента 2И-НЕ, отличающееся тем, что, с целью повышения точности отпуска дозы и надеж- нести в работе устройства, в него введены горизонтальный затвор с электромеханическим приводом, затвор с электромеханическим приводом, три датчика положения затвора, дополнительные элементы 2И-НЕ, элементе ЗИ-НЕ, 2ИЛИ-НЕ, RS-триггер и блок реле включения электропривода горизонтального затвора, фотоприемники подключены к второй группе информационных входов блока регистра управления, выходы датчиков положения затвора подключены к третьей группе информационных входов блока регистра управления,а другие выходы датчиков верхнего и нижнего уровней сыпучей горной массы подключены к четным входом первой группы информационных входов блока регистра управления, второй выход которого подключен к первому входу дополнительного элемента 2И-НЕ, второй вход которого соединен с выходом микрону оцессорного вычислительного устройст- ва, а выход - с S-входом RS-триггера, выходы последнего подключены к входам бло а реле включения электропривода горизонтального затвора, третий выход блока
регистра управления подключен к второму входу элемента 2И-НЕ, выход которого подключен к первому входу первого элемента 2ИЛИ-НЕ, выход которого подключен к входу микропроцессорного вычислительного устройства и первому входу второго элемента 2ИЛИ-НЕ, выход которого подключен к микропроцессорному вычислительному устройству и второму входу первого элемента 2ИЛИ-НЕ. четвертый выход блока регистра управления соединен с первым входом элемента ЗИ-НЕ, второй вход которого соединен с другим концом кнопки Стоп, третий вход объединен с инверсным R-входом RS- тригге ра и с рядом входов блока регистра управления и подключен к выходу микропроцессорного вычислительного устройства, а выход элемента ЗИ-НЕ.подключен к второму входу второго элемента 2ИЛИ-НЕ и прямому входу RS-триггера. при этом блок регистра управления выполнен на семи RS- триггерах и семи элементах 2И-НЕ,, выход каждого из которых соединен с R-входом соответствующего RS-триггера, S-вход каждого из которых является входом блока регистра управления, выход, каждого RS-триггера является соответствующим вы- ходом блока регистра управления, одни и другие входы элемента 2И-НЕ являются входами блока регистра управления.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления вибрационным питателем для загрузки железнодорожных вагонов | 1989 |
|
SU1791288A1 |
| Весы | 1989 |
|
SU1783314A1 |
| Устройство для предварительной обработки изображений | 1989 |
|
SU1654849A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство управления дозированием бетонной смеси | 1981 |
|
SU1011385A1 |
| Устройство контроля состояния объектов | 1985 |
|
SU1366993A1 |
| Устройство управления вибрационным питателем для загрузки железнодорожных вагонов | 1989 |
|
SU1654785A1 |
| Устройство стабилизации амплитуды видеосигнала | 1989 |
|
SU1748283A1 |
| Устройство для загрузки бункеров стекольной шихтой | 1990 |
|
SU1724553A1 |
| Вероятностная вычислительная машина | 1986 |
|
SU1455344A1 |
Сущность изобретения: устройство содержит накопительный бункер, горизонтальный затвор с электромеханическим затвором, железнодорожный вагон, датчики уровня горной массы в бункере, три датчика положения затвора, фотоизлучатели и фотоприемники, блок регистра управления, кнопку ПУСК, логический элемент 2И-НЕ, логический элемент 2ИЛИ-НЕ, кнопку СТОП, логический элемент 2И-НЕ, логический элемент 2ИЛИ-НЕ, блок индикации времени суток, блок таймера, логический элемент 2И-НЕ, триггер, блок реле, печатающее устройство, микропроцессорное вычислительное устройство-, блок задания дозы отпуска материала и клавишный пульт управления. Устройство управления обеспечивает работу горизонтального затвора при отпуске дозы как в ручном, так и в автоматическом режимах работы. 3 ил. (Л
.ПИТАНИЕ
. ПРНВГЩ ПРМ-АПП/ЛЯр-П
Привод винтовой моторный
Напряжение 380/660 В
Фи. i
-З-ЖШШ. ПСЛОЖЕНИЯ ЗАТВОРА
ЬеЛ
. . шшши
ДАТЧИК ПОЛОЖЕНИЯ
ztroiesL
CM
ч- о f- -со со
ц. о
rtf-.
|PHJH / tff/-m
РМЯ--/СР- оз/г pnm-. KPi-oyz
ГТ6;Ш; Л; I ItbiHljOB-/
r
6Я/7.-0
ли
