Изобретение относится к измерительной технике и может быть использовано, например, для оценки условий движения транспортных средств.
Цель изобретения - повышение точности измерений за счет исключения необходимости измерения изменения угла поворота.
На фиг. 1 представлена схема, поясня- ющдя способ; на фиг. 2 - устройство, реализующее способ.
Устройство для осуществления способа содержит (фиг. 2) два датчика 1 и 2 оборотов (например, индукционных), каждый из которых расположен соответственно на левом и правом колесах транспортного средства (не показаны).
Датчик 1 связан со счетчиком 3 импульсов, датчик 2 - со счетчиком 4 импульсов, вь1ходы счетчиков 3 и 4 импульсов подключены к входам.вычислительного блока 5, выход датчика 2 - к одному из входов вычислительного блока 5. К вторым входам счетчиков 3 и 4 импульсов подключен генератор б импульсов. Выход вычислительного блока 5 через блок 7 сопряжения подключен к регистратору 8. Датчик 1 оборотов,счечик 3 импульсов и генератор 6 импульсов о бра- зуют в совокупности первый датчик линейной скорости колеса, датчик 2 оборотов, счетчик 4 импульсов и генератор 6 импульсов - соответственно второй датчик линейной скорости колеса.
На прямолинейном участке движения соосные колеса автомобиля имеют одинаковую скорость. На поворотах соосные колеса описывают кривые различного радиуса (фиг.1) и, следовательно, за времяДт проходят разные расстояния (наружное колесо - LI, внутреннее - L2) и имеют разные скорости.
Причем Li Vi At;(1)
L2 V2At,(2)
где V/1 и V2 - соответственно линейные скорости наружного и внутреннего колес автомобиля.
При этом
Li/L2 Ri/R2. (3)
где RI и R2 - соответственно радиусы, описываемые при прохождении поворота наружным и внутренним колесом. Учитывая, что
R2 Ri-H,. (4)
где Н - расстояние между соосными колесами,
радиус закругления можно вычислить как
RI
ViH
(5)
Vi - V2
Способ осуществляется следующим образом (фиг.2).
При каждом обороте соосных колес (не
показаны) сигналы с индукционных датчиков 1 и 2 оборотов поступают на счетчики 3 и 4 импульсов соответственно. На вторые входы счетчиков 3 и 4 импульсов поступают 0 импульсы с генератора 6 импульсов. На выходах счетчиков 3 и 4 импульсов имеют место кодовые сигналы, пропорциональные соответственно линейным скоростям наружного и внутреннего колес. В вычисли- 5 тельном блоке 5 производится вычисление радиуса кривой в плане автомобильной дороги по формуле (5). Через блок 7 сопряжения выходной сигнал поступает на регистратор 8, например накопитель на маг- 0 нитной ленте.
Формула изобретения 1. Способ измерения радиуса кри вой в плане автомобильной дороги, заключаю- щийся в том, что измеряют линейную ско- 5 рость одного из колес транспортного средства, отличающийся тем, что, с целью повышения точности измерений, измеряют линейную скорость другого, соосного с первым, колеса транспортного средства, опре- 0 деляют разность этих скоростей, а величину радиуса кривой вычисляют как отношение произведения скорости одного из колес на расстояние между соосными колесами и разности скоростей колес, 5 2, Устройство для измерения радиуса кривой в плане автомобильной дороги, содержащее датчик линейной скорости одного из колес транспортного средства, регистратор, отличающееся тем, что, 0 с целью повышения точности измерений, оно снабжено датчиком линейной скорости второго, соосного с первым, колеса транспортного средства, вычислительным блоком, подключенным к выходам обоих 5 датчиков, а регистратор подключен к вычислительному блоку через блок сопряжения.
3; Устройство по п,2, о т л и ч 3 ю щ е е- с я тем, что датчики линейной скорости колес транспортного средства выполнены в 50 виде датчиков оборотов, устанавливаемых на колесах транспортного средства, подключенных к ним счетчиков импульсов,, генератора импульсов, подключенного к вторым входам счетчиков импульсов, а вы- 55 ходы счетчиков импульсов образуют выходы датчиков линейной скорости колес.
if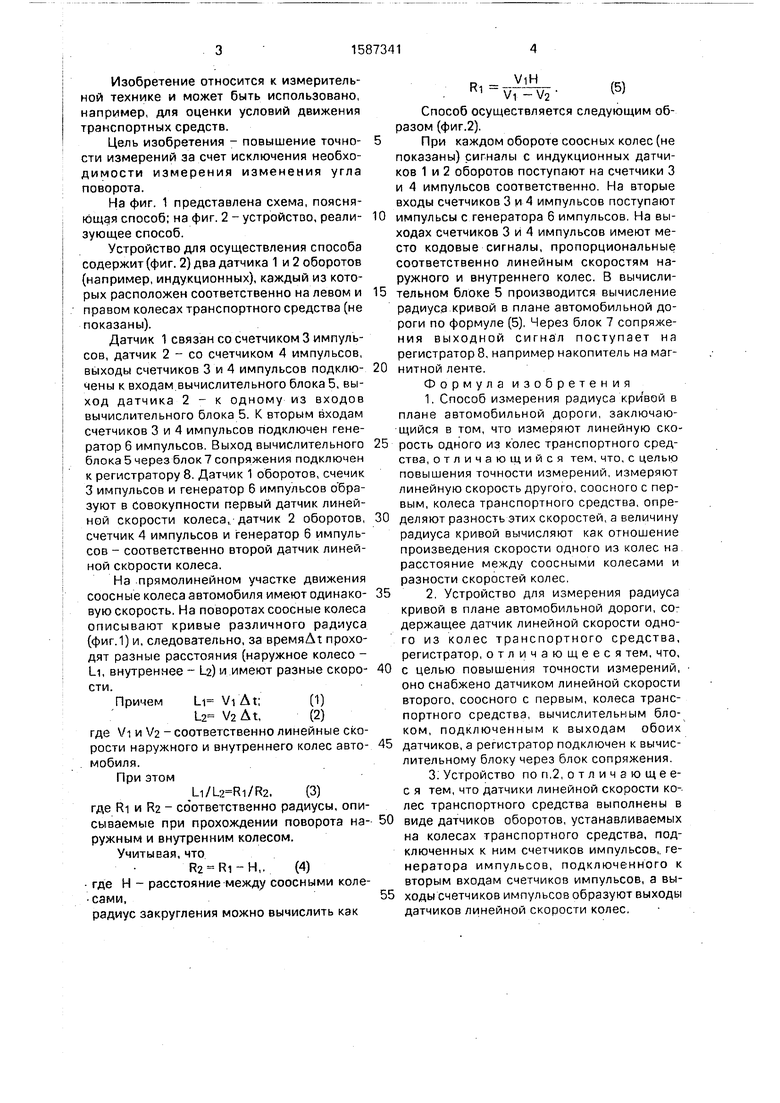
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОИСКА УГНАННЫХ АВТОМОБИЛЕЙ | 2001 |
|
RU2218604C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАВЛЕНИЯ В ШИНАХ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2047852C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462696C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРИВИЗНЫ И УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ ДОРОЖНОГО ПОКРЫТИЯ В ДВУХ РАЗЛИЧНЫХ НАПРАВЛЕНИЯХ, ПРЕИМУЩЕСТВЕННО В НАПРАВЛЕНИИ ДВИЖЕНИЯ АВТОМОБИЛЯ И В ПОПЕРЕЧНОМ ЕМУ НАПРАВЛЕНИИ | 1996 |
|
RU2114391C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2081232C1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| Система определения скорости локомотива | 2023 |
|
RU2809393C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ СРОКА ЭКСПЛУАТАЦИИ ДОРОЖНОГО ПОКРЫТИЯ | 2012 |
|
RU2521682C2 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
Изобретение относится к измерительной технике и может быть использовано для оценки условий движения транспортных средств. Целью изобретения является повышение точности измерений. Согласно способу радиус кривой в плане автомобильной дороги вычисляется в соответствии с формулой R 1-V 1H / V 1-V 2, где V 1 и V 2 - соответственно линейные скорости наружного и внутреннего колес автомобиля, H - расстояние между соосными колесами. При каждом обороте соосных колес сигналы с индукционных датчиков 1,2 оборотов поступают на счетчики 3,4 импульсов, на другие входы которых поступают импульсы с генератора 6 импульсов. С выходов счетчиков 3,4 импульсов кодовые сигналы, пропорциональные линейным скоростям колес, поступают в вычислительный блок 5 и через блок 7 сопряжения в регистратор 8. 2 с.п. ф-лы, 1 з.п. ф-лы, 2 ил.
| Дорожная инвентаризационная машина | 1976 |
|
SU634098A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сильянов в.в | |||
| Транспортно-эксплуата- ционные качества автомобильных дорог | |||
| - М.: Транспорт | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| с, 156-157 | |||
