Изобретение относится к области транспорта, а точнее - к строительству дорог, дорожных покрытий, машинам и вспомогательному оборудованию для строительства, ремонта, и может быть использовано для определения профиля поверхности дорожного покрытия.
Известен способ определения уклонов профиля поверхности дорожного покрытия с помощью профилометра, включающий регистрацию информации о профиле дороги на киноленте и обработку результатов (авт. св. СССР N 503000, кл. E 01 C 23/01, 1974).
Недостатки известного способа заключаются в том, что он не позволяет определить кривизну поверхности покрытия в плане, а при измерении уклонов в профиле не обеспечивается достаточная точность измерения, его надежность ввиду введения косвенных источников регистрации информации и сложности ее обработки.
Известен способ измерения уклонов профиля дорожного покрытия в двух различных направлениях посредством чувствительного к уклонам маятника, подвешенного к опоре и свободно качающегося в направлении измерения уклона (патент США N 3797124, кл. G 01 C 7/04, публ. 1974).
Недостатки данного способа заключаются в том, что он не позволяет определять кривизну дорожного покрытия в плане и при этом не обладает достаточной точностью измерения уклонов дорожного покрытия, поскольку не учитывает особенности движения транспортного средства при ускорениях и замедлениях, в момент трогания с места, и влияния дополнительного силового воздействия на чувствительный элемент в процессе меняющегося режима движения транспортного средства.
Известен способ измерения профиля поверхности дорожного покрытия в двух различных направлениях в процессе движения автомобиля посредством датчиков, установленных в кузове автомобиля, измерительно-вычислительного комплекса, определяющих изменение положения движущихся левого и правого колес в вертикальном направлении, а также передних и задних колес как следствие уклонов профиля дорожного покрытия, изменения ускорений движущихся масс автомобиля с учетом изменения скоростного режима движения автомобиля, в том числе и на наклонных участках дорожного покрытия (Европейский патент N 0274632, кл. G 01 C 7/04, публ. 1991).
Данный известный способ позволяет непрерывно определять состояние профиля поверхности дорожного покрытия в любой отрезок времени и пройденного пути по расположению колес автомобиля в вертикальной плоскости, а также по их расположению относительно кузова автомобиля, однако обладает такими недостатками, как большое количество датчиков измерения параметров, сложностью измерительно-вычислительного комплекса и программного обеспечения, в связи с чем снижается надежность работы аппаратуры, испытывающей изменяющиеся нагрузки в процессе движения автомобиля.
Известен наиболее близкий по технической сущности и назначению по отношению к описываемому способ измерения кривизны и уклонов профиля дорожного покрытия в двух различных направлениях, преимущественно в направлении движения автомобиля и в поперечном к нему направлении (патент РСТ N 92/10730, кл. G 01 C 7/04, E 01 C 23/01, публ. 1992).
Данный известный способ включает измерение ускорения/замедления автомобиля, скорости его движения, пройденного пути и времени движения, угловой скорости и курсового угла, определение и корректировку базиса отсчета относительно горизонтальной плоскости, анализ упомянутых данных с помощью измерительно-вычислительного комплекса, определение уклонов дорожного покрытия в двух различных направлениях по отношению к горизонту, выдачу на монитор измерительно-вычислительного комплекса (ИВК) расчетных параметров, вычисление и корректировку с помощью ЭВМ измеряемых параметров в процессе движения автомобиля в соответствии с заданными условиями. Недостатком известного способа является то, что он не отражает достоверно изменения скорости вращения колеса вследствие изменений, например, внутреннего давления воздуха в шине, что снижает точность измеряемых параметров.
Задача изобретения - создание такого способа определения кривизны и уклонов профиля поверхности дорожного покрытия, который бы позволил упростить сам процесс измерения параметров, повысить его надежность за счет использования более простых, доступных и лучше приспособленных к дорожным условиям средств и методов измерения параметров, а также уменьшения количества датчиков.
Технический результат, который может быть получен при осуществлении изобретения заключается в повышении точности измеряемых параметров с учетом изменения режима движения автомобиля, состояния его колес, взаимодействующих с покрытием, что вызывает изменение длины окружности колеса и оказывает влияние на точность определения геометрических параметров автомобильной дороги.
Это достигается тем, что в предлагаемом способе определения кривизны и уклонов профиля дорожного покрытия в двух различных направлениях, преимущественно в направлении движения автомобиля и в поперечном к нему направлении, который включает измерение ускорения/замедления автомобиля, измерение линейной скорости движения автомобиля, пройденного им пути и времени движения, угловой скорости поворота или курсового угла, анализ упомянутых данных с помощью ЭВМ, определение и корректировку базиса отсчета относительно горизонтальной плоскости, определение уклонов дорожного покрытия в двух различных направлениях относительно плоскости горизонта, выдачу на экран монитора измерительно-вычислительного комплекса (ИВК) расчетных параметров, вычисление и корректировку с помощью ЭВМ измеряемых параметров в процессе движения автомобиля в соответствии с заданными требованиями, согласно изобретению определение уклона профиля дорожного покрытия в направлении движения автомобиля осуществляют путем вычисления значения ускорения/замедления, пропорционального ускорению силы тяжести и уклону профиля покрытия в направлении движения как разности между общим ускорением/замедлением движущегося автомобиля и ускорением/замедлением движущихся масс автомобиля на участке измерения в продольном направлении и фильтруемых ускорений/замедлений, обусловленных колебаниями движущихся масс в вертикальном направлении в плоскости, расположенной вдоль направления движения автомобиля, проведением корректировки этого значения вычисленной разности ускорения/замедления путем уточнения отрезков пройденного пути в соответствии с изменением длины окружности колеса автомобиля при изменении условий эксплуатации, последующего исчисления в ЭВМ величины продольного уклона профиля дорожного покрытия для заданного отрезка дороги; определение уклона профиля дорожного покрытия в направлении, поперечном к направлению движения автомобиля осуществляют путем вычисления значения ускорения/замедления, пропорционального ускорению силы тяжести и уклону профиля дорожного покрытия в направлении, поперечном к направлению движения, как разности между общим ускорением/замедлением, и ускорением/замедлением, обусловленным действием центробежных сил, возникающих при повороте автомобиля (изменении курса), и фильтруемых ускорений/замедлений, обусловленных колебаниями движущихся масс автомобиля в вертикальном направлении в плоскости, поперечной к направлению движения, проведением корректировки этого значения вычисленной разности ускорения/замедления путем уточнения отрезков пройденного пути в соответствии с изменением длины окружности колеса автомобиля в процессе движения при изменении условий эксплуатации, последующего исчисления в ЭВМ величины поперечного уклона профиля дорожного покрытия для заданного отрезка пути.
Это достигается тем, что измерение ускорений/замедлений движущегося или неподвижного автомобиля и выдачу исходных сигналов для вычисления уклонов дорожного покрытия осуществляют путем использования электрических сигналов, поступающих от двух расположенных во взаимно перпендикулярных направлениях акселерометров, ось чувствительности одного из которых расположена вдоль направления движения автомобиля, и электрических сигналов, поступающих от датчика числа оборотов колеса автомобиля и от датчика угловой скорости или датчика курса.
Это достигается тем, что определение пройденного пути, в том числе в заданных интервалах времени, линейной скорости движения, радиуса закругления (кривизны) и угла поворота дороги в плане осуществляют путем использования счетчика числа оборотов колеса автомобиля и электрических сигналов, поступающих от датчика угловой скорости или датчика курса, причем корректировка пройденного пути в зависимости от изменения длины окружности колеса осуществляется в ЭВМ, связанной электрическими цепями со счетчиком числа оборотов колеса.
Это достигается также тем, что корректировку продольного уклона осуществляют путем использования электрических сигналов, поступающих с датчика линейной скорости движения автомобиля на выходные электрические цепи продольного акселерометра при неподвижном автомобиле и при движении на фиксированном участке пути.
Это достигается также тем, что корректировку поперечного уклона осуществляют путем использования электрических сигналов, поступающих с датчиков линейной скорости, угловой скорости поворота автомобиля (или курса) на выходные цепи поперечного акселерометра при неподвижном автомобиле и при его движении на фиксированных участках пути.
Это достигается также и тем, что корректировку базиса отсчета относительно плоскости горизонта осуществляют путем определения углового смещения базиса как полусуммы текущих значений соответственно продольного и поперечного уклонов, измеренных для двух фиксированных положений автомобиля - при условно нулевом курсе PSIO и при курсе (PSIO+180), град.
На фиг. 1 представлена последовательность выполняемых операций при осуществлении описываемого способа; на фиг. 2 и 3 - схема для определения смещений начального базиса отсчета, относительно которого определяются уклоны профиля дорожного покрытия и их корректировка.
Описываемый способ реализуется при движении автомобиля и включает измерение ускорения/замедления автомобиля в продольном направлении движения и в поперечном к нему направлении, измерение линейной скорости движения автомобиля, пройденного пути и времени движения, угловой скорости поворота или курсового угла, определение и корректировку базиса отсчета относительно горизонтальной плоскости, анализ данных с помощью ЭВМ, вычисление уклонов дорожного покрытия в двух различных направлениях относительно плоскости горизонта, выдачу на монитор ИВК расчетных параметров, вычисление и корректировку с помощью ЭВМ измеряемых параметров в процессе движения автомобиля в соответствии с заданными требованиями.
Общее ускорение/замедление (Ax1), действующее в направлении движения автомобиля (Х1), фиксируется продольным акселерометром 1, ось чувствительности которого расположена вдоль продольной оси автомобиля, и может быть представлена в виде трех составляющих, одна из которых пропорциональна ускорению силы тяжести (g) неподвижного автомобиля и продольному уклону α1 профиля дорожного покрытия в направлении движения; другая составляющая пропорциональна продольному ускорению/замедлению (ax1) автомобиля; а третья составляющая (a
Общее ускорение/замедление (Ax3) автомобиля, действующее в поперечном направлении, фиксируется поперечным акселерометром 2 и может быть представлено в виде трех составляющих, одна из которых пропорциональна ускорению силы тяжести (g) неподвижного автомобиля и поперечному уклону α2 дорожного покрытия в направлении, поперечном направлению движения; вторая составляющая (ax3) пропорциональна поперечному ускорению/замедлению, возникающему при поворотах автомобиля; третья составляющая (a
Общие ускорения/замедления автомобиля как движущегося, так и неподвижного фиксируются акселерометрами 1 и 2, смонтированными на подрессоренном корпусе автомобиля, при этом их оси чувствительности расположены соответственно вдоль (X1) и поперек (X3) направления движения автомобиля.
Измерение пройденного пути и линейной скорости движения автомобиля, в том числе в любых заданных интервалах времени, осуществляется датчиком пути 7, датчиком линейной скорости автомобиля Vx 5, выполненного в виде счетчика 3 числа оборотов (n) колеса автомобиля при непрерывном отсчете времени движения автомобиля.
Угловая скорость поворота или курсовой угол фиксируются с помощью датчика угловой скорости (ДУС) 16 или датчика курсового угла 4 (например ГА-8, Г-3, ГА-6). Для корректировки изменения длины окружности колеса вследствие изменений условий эксплуатации и связанного с этим погрешностями определения линейной скорости автомобиля и продольного уклона α1 используется электрическая связь, соединяющая датчик линейной скорости движения автомобиля с продольным акселерометром, а для корректировки изменения длины окружности колеса при определении поперечного уклона α2 используется электрическая связь, соединяющая датчик линейной скорости, датчик угловой скорости поворота автомобиля или датчик курса с поперечным акселерометром.
Последовательность операций при определении продольного уклона α1 профиля дорожного покрытия включает фиксирование общего ускорения/замедления (Ax1) продольным акселерометром в виде (gα1+ax1± a , определяемым в дифференциаторе 6, и поступает на фильтрацию по нижним частотам (фильтр 10), в результате чего формируется сигнал gα1, пропорциональный продольному уклону α1, который вводится в ЭВМ 14 и 15. Здесь сигналы gα1 периодически сравниваются с аналогичными сигналами, измеренными на одних и тех же участках дороги при неподвижном автомобиле и при его движении и по их разностям формируются поправки, учитывающие изменение длины окружности колеса автомобиля, из-за изменения условий эксплуатации, например, при изменении давления воздуха в пневматической шине из-за ее нагрева и т.д.
, определяемым в дифференциаторе 6, и поступает на фильтрацию по нижним частотам (фильтр 10), в результате чего формируется сигнал gα1, пропорциональный продольному уклону α1, который вводится в ЭВМ 14 и 15. Здесь сигналы gα1 периодически сравниваются с аналогичными сигналами, измеренными на одних и тех же участках дороги при неподвижном автомобиле и при его движении и по их разностям формируются поправки, учитывающие изменение длины окружности колеса автомобиля, из-за изменения условий эксплуатации, например, при изменении давления воздуха в пневматической шине из-за ее нагрева и т.д.
От поперечного акселерометра общий электрический сигнал, пропорциональный (Аx3) в виде gα2-ax3+a где
где  - курс автомобиля (угловая скорость) в заданный отрезок времени; Vx1 - линейная скорость движения в заданный отрезок времени; а затем поступает на фильтрацию по нижним частотам (фильтр 9), после чего образуется сигнал в виде gα2, пропорциональный поперечному уклону α2, который вводится в ЭВМ. Здесь сигналы gα2 периодически сравниваются с аналогичными сигналами, измеренными на одних и тех же участках дороги при неподвижном автомобиле и при его движении, и по их разностям формируются поправки, учитывающие изменение длины окружности колеса автомобиля. Сигнал обрабатывается на ЭВМ по программе с выводом требуемой информации на монитор 14 измерительно-вычислительного комплекса 16, и определяется поперечный уклон α2 дорожного покрытия, который корректируется в процессе движения автомобиля с учетом изменения длины окружности колеса.
- курс автомобиля (угловая скорость) в заданный отрезок времени; Vx1 - линейная скорость движения в заданный отрезок времени; а затем поступает на фильтрацию по нижним частотам (фильтр 9), после чего образуется сигнал в виде gα2, пропорциональный поперечному уклону α2, который вводится в ЭВМ. Здесь сигналы gα2 периодически сравниваются с аналогичными сигналами, измеренными на одних и тех же участках дороги при неподвижном автомобиле и при его движении, и по их разностям формируются поправки, учитывающие изменение длины окружности колеса автомобиля. Сигнал обрабатывается на ЭВМ по программе с выводом требуемой информации на монитор 14 измерительно-вычислительного комплекса 16, и определяется поперечный уклон α2 дорожного покрытия, который корректируется в процессе движения автомобиля с учетом изменения длины окружности колеса.
На фиг. 2 и 3 изображено положение оси чувствительности X1 продольного акселерометра Аксх1 при двух фиксированных положениях автомобиля:
при произвольном курсе PSIO;
при курсе (PSIO+180) град.
Поскольку акселерометры установлены в кузове автомобиля, то угловое положение оси X1 будет отличаться от углового положения плоскости дорожного покрытия L на величину базиса углового смещения α10.
Это вызвано тем, что при трогании автомобиля с места, ускорениях и замедлениях автомобиля в процессе его движения, при движении автомобиля по наклонным участкам дороги, при поворотах имеют место колебания кузова автомобиля как в направлении движения, так и в поперечном к нему направлении относительно центра масс (O), положение которого может не совпадать с плоскостью, в которой расположена ось чувствительности продольного акселерометра. Поэтому положение базиса относительно плоскости горизонта, от которого осуществляется определение уклонов профиля дорожного покрытия, меняется, что требует корректировки.
Результатом измерения в первом положении автомобиля (фиг. 2) будет величина уклона, равная:
α
где
α10 - угловое смещение базиса отсчета относительно плоскости горизонта. Результатом измерения во втором положении автомобиля (фиг. 3) будет величина уклона, равная:
α
Откуда находим величину смещения базиса отсчета:
Аналогично вычисляется величина смещения базиса для поперечных уклонов: .
.
Величины уклонов рассчитываются по формулам: ,
,
где
α
Кривизна дорожного покрытия в плане в случае использования датчика угловой скорости поворота (ДУС) определяется следующим образом:
где - угловая скорость поворота, радиан/сек;
- угловая скорость поворота, радиан/сек;
V - линейная скорость автомобиля, м/с.
Кривизна дорожного покрытия в плане в случае использования датчика курсового угла определяется следующим образом;
где - последующее и предыдущее значения курса (рад), измеренные на концах интервала времени dt.
- последующее и предыдущее значения курса (рад), измеренные на концах интервала времени dt.
Пройденный путь определяется по формуле:
S = (Lн+dL)•n, M,
где
Lн - номинальное значение длины окружности колеса;
dL - поправка на изменение длины окружности колеса;
n - число оборотов колеса.
Предлагаемый способ позволяет рассчитывать, выдавать на монитор и записывать в ИВК полную информацию о профиле и плане дорожного покрытия в любой заданный интервал времени и за любой отрезок пройденного пути.


Способ используется в области транспорта и при строительстве дорог при определении профиля их дорожного покрытия. Проводят измерение ускорения автомобиля, изменение линейной скорости движения автомобиля, пройденного пути и времени движения, угловой скорости поворота или курсового угла, определение и корректировку базиса отсчета относительно плоскости, анализ упомянутых данных с помощью ЭВМ, определение уклонов дорожного покрытия в двух различных направлениях относительно плоскости горизонта, выдачу на экран монитора измерительно-вычислительного комплекса (ИВК) расчетных параметров в процессе движения автомобиля в соответствии с заданными требованиями. При определении уклонов профиля дорожного покрытия в направлении движения автомобиля определяют величину ускорения, пропорциональную ускорению силы тяжести и продольному уклону, которую затем корректируют с учетом изменения длины окружности колеса автомобиля при изменении его эксплуатации. При определении уклонов профиля дорожного покрытия в направлении, поперечном к направлению движения, определяют величину ускорения, пропорциональную ускорению силы тяжести и уклону профиля в поперечном направлении, которую затем корректируют с учетом изменения длины окружности колеса автомобиля при изменении условий его эксплуатации. Упрощен процесс измерения и повышена его надежность. 5 з.п.ф-лы, 3 ил.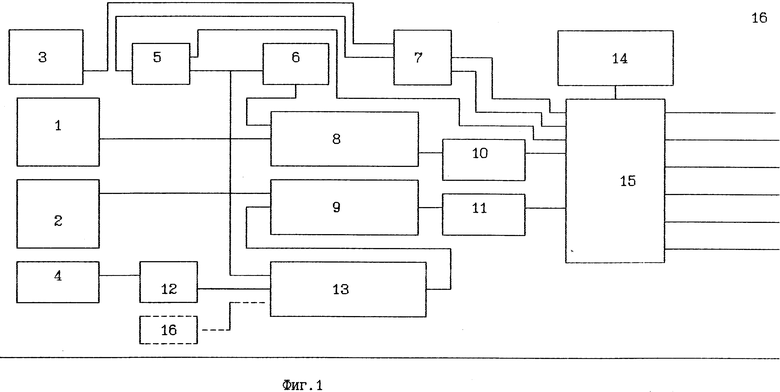
| PCT, заявка, WO 92/10720, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
