Изобретение относится к ручному механизированному инструменту с регулируемым моментом затяжки и может быть использовано в различных отраслях промышленности при монтажных и сборочных работах.
Цель изобретения - повышение надежности за счет изменения кинематической связи шпинделя с редуктором и пневмо- клапаном.
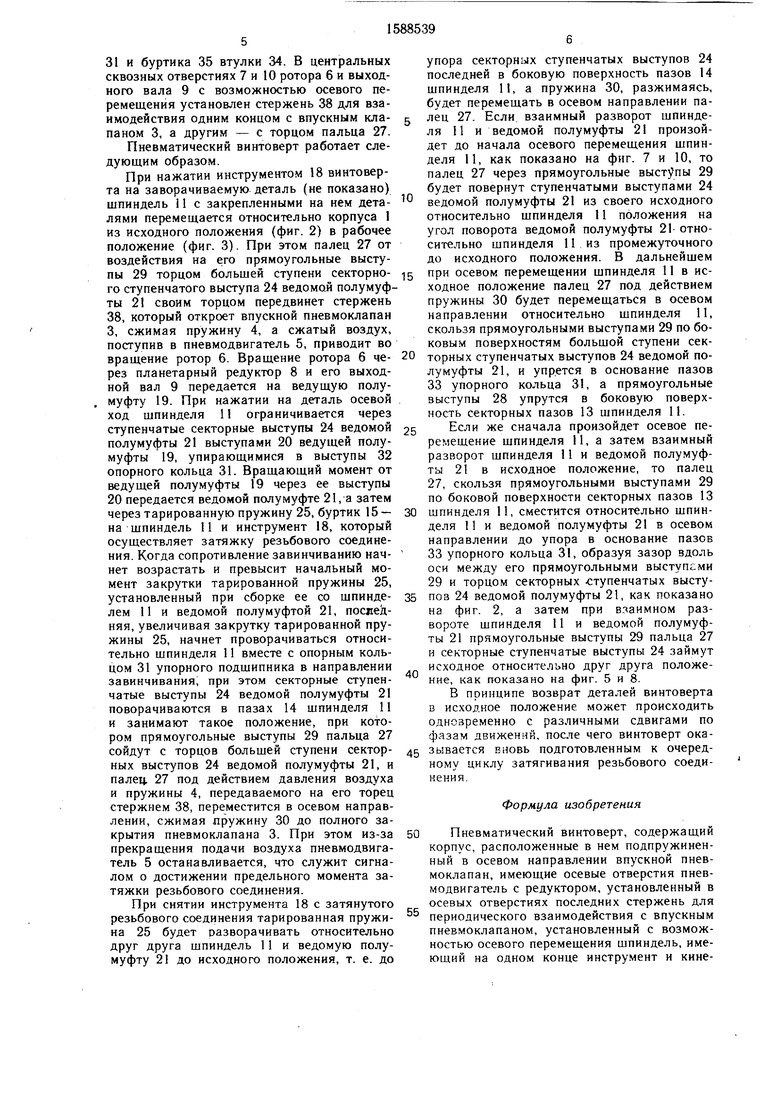
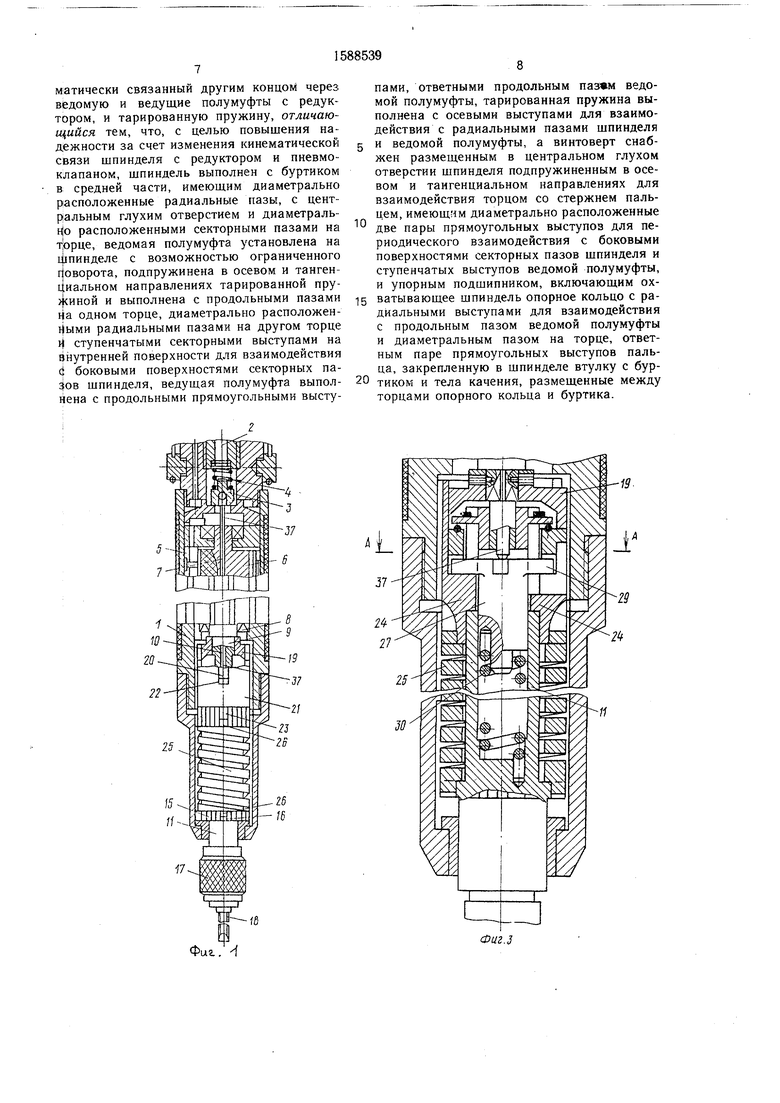
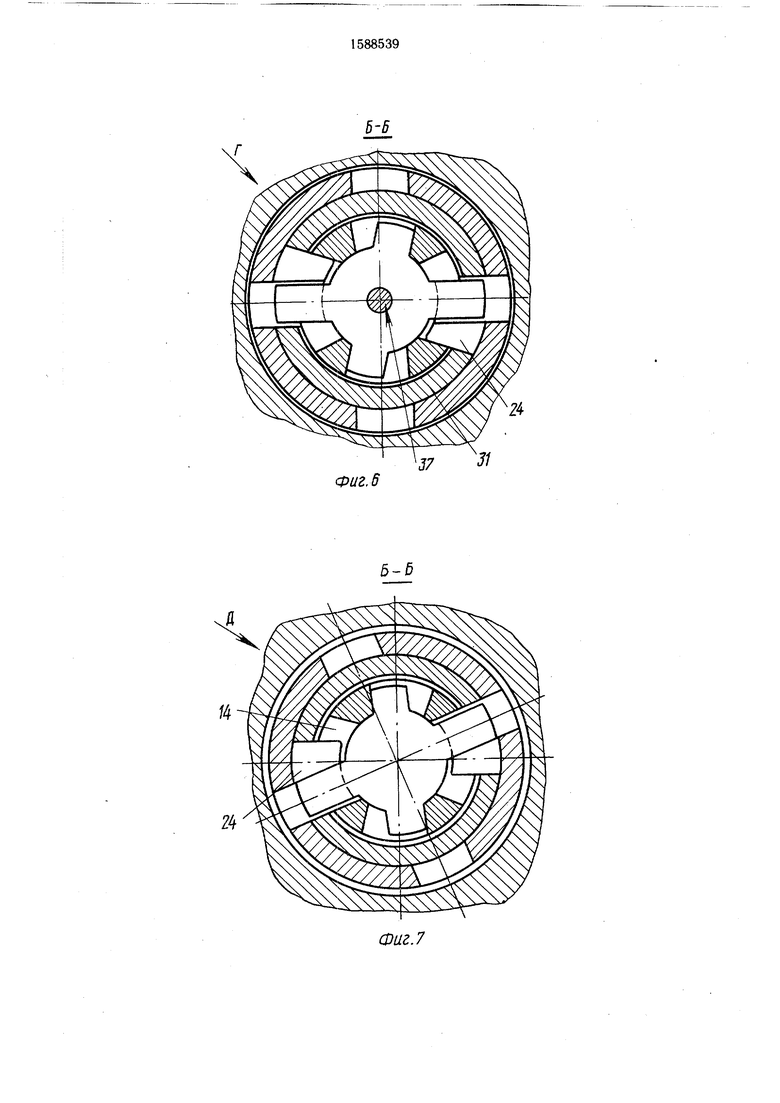
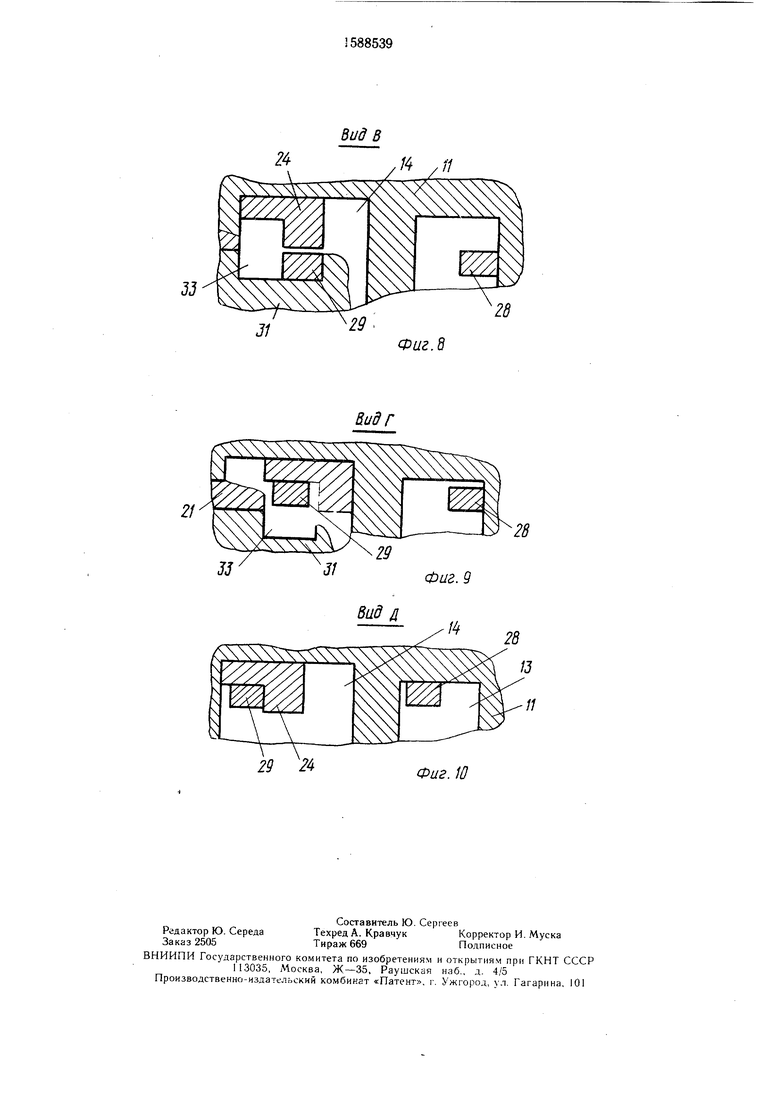
На фиг. 1 схематично изображен предлагаемый пневматический винтоверт; на фиг. 2 - то же, в исходном положении, продольный разрез; на фиг. 3 - то же, при нажатии на заворачиваемую деталь, продольный разрез; на фиг. 4 - то же, при достижении предельного момента затяжки резьбового соединения, продольный разрез; на фиг. 5 - сечение А-А на фиг. 2 и 3; на фиг. 6 - сечение Б-Б на фиг. 4; на фиг. 7 - сечение Б-Б на фиг. 4 (возможное расположение деталей винтоверта после достижения предельного момента); на фиг. 8 - вид В (развертка) на фиг. 5; на фиг. 9 - вид Г (развертка) на фиг. 6; на фиг. 10 - вид Д (развертка) на фиг. 7.
Пневматический винтоверт содержит корпус 1 с зоздухоподводящим каналом 2, размещенный в последнем впускной пневмоклапан 3, подпружиненный в осевом направлении пружиной 4, размещенные в кор- пу Се 1 пневмодвигатель 5 с ротором 6, имеющим сквозное центральное отверстие 7, связанный с ротором 6 планетарный редуктор 8 с выходным валом 9 со сквозным центральным отверстием 10, установленный с возможностью осевого перемещения шпиндель 11, имеющий на одном конце центральное глухое отверстие 12 и диаметрально расположенные секторные пазы 13 и 14, Б средней части - буртик 15 с радиальными пазами 16 и на другом конце - патрон 17 под сменный инструмент 18. На конце выходного вала 9 планетарного редуктора 8 закреплена ведущая полумуф20
та 19 с продольными прямоугольными выступами 20. На конце шпинделя 11 установлена с возможностью поворота ведомая полумуфта 21, имеющая на одном торце прямоугольные продольные пазы 22, ответные продольным прямоугольным выступам
25 20 ведущей полумуфты 19, на другом торце - диаметрально расположенные радиальные пазы 23 и на внутренней поверхности секторные ступенчатые выступы 24, размещенные в диаметрально расположенных секторных пазах 14 шпинделя 11 и обращенные
30 ступенями в сторону ведущей полумуфты 19. Ведомая полумуфта 21 подпружинена в сторону ведущей полумуфты 19, предварительно нагруженной в осевом и тангенциальном направлении тарированной пружиной 25, имеющей на торцах осевые выступы 26,
35 которые размещены в радиальных пазах 16 и 23 шпинделя 11 и ведомой полумуфты 21 соответственно. В центральном глухом отверстии 12 шпинделя 11 установлен палец 27, имеющий две пары прямоуголь40 ных выступов 28 и 29, расположенных в секторных пазах 13 и 14 шпинделя 11 соответственно, при этом описанные диаметры прямоугольных выступов 28 и 29 равны наружному диаметру шпинделя 11 и внутреннему диаметру ведомой полумуфты 21 соот45 ветственно. Палец 27 подпружинен в осевом и тангенциальном направлении пружиной 30, предварительно заневоленной в осевом и тангенциальном направлении.
На конце шпинделя 11 установлен упорный подшипник, выполненный в виде опор ного кольца 31, имеющего радиальные выступы 32, которые расположены в продольных пазах 22 ведомой полумуфты 21, и диаметрально расположенные на торце пазы 33, ответные выступам 29 пальца 27, охватывающей конец выходного вала 9 втулки 34 с буртиком 35, закрепленной на шпинделе 11 от осевого смещения упругим кольцом 36, и тел 37 качения, размещенных между торцами опорного кольца
55
дет до начала осевого перемещения шпинделя 11, как показано на фиг. 7 и 10, то палец 27 через прямоугольные выступы 29 будет повернут ступенчатыми выступами 24 ведомой полумуфты 21 из своего исходного относительно шпинделя 11 положения на угол поворота ведомой полумуфты 21- относительно шпинделя 11 из промежуточного до исходного положения. В дальнейшем
31 и буртика 35 втулки 34. В центральных упора секторных ступенчатых выступов 24 сквозных отверстиях 7 и 10 ротора 6 и выход-последней в боковую поверхность пазов 14
ного вала 9 с возможностью осевого пе-шпинделя II, а пружина 30, разжимаясь,
ремещения установлен стержень 38 для вза-будет перемещать в осевом направлении паимодействия одним концом с впускным кла- g лец 27. Если взаимный разворот щпинде- паном 3, а другим - с торцом пальца 27. ля П и ведомой полумуфты 21 произойПневматический винтоверт работает следующим образом.
При нажатии инструментом 18 винтовер- та на заворачиваемую деталь (не показано) шпиндель 11 с закрепленными на нем деталями перемещается относительно корпуса 1 из исходного положения (фиг. 2) в рабочее положение (фиг. 3). При этом палец 27 от воздействия на его прямоугольные высту-„.,
пы 29 торцом большей ступени секторно- 15 Р осевом перемещении шпинделя П в не го ступенчатого выступа 24 ведомой полумуф- ходное положение палец 27 под действием ты 21 своим торцом передвинет стержень пружины 30 будет перемещаться в осевом 38, который откроет впускной пневмоклапан направлении относительно щпинделя 11, 3, сжимая пружину 4, а сжатый воздух,скользя прямоугольными выступами 29 по бопоступив в пневмодвигатель 5, приводит воковым поверхностям большой ступени секвращение ротор 6. Вращение ротора б че- 20 торных ступенчатых выступов 24 ведомой порез планетарный редуктор 8 и его выход-лумуфты 21, и упрется в основание пазов ной вал 9 передается на ведущую полумуфту 19. При нажатии на деталь осевой ход щпинделя 11 ограничивается через ступенчатые секторные выступы 24 ведомой 25 полумуфты 21 выступами 20 ведущей полумуфты 19, упирающимися в выступы 32 опорного кольца 31. Вращающий момент от ведущей полумуфты 19 через ее выступы
20 передается ведомой полу муфте 21, а затем.. .
через тарированную пружину 25, буртик 15- 30 шпинделя 11, сместится относительно шпин на шпиндель 11 и инструмент 18, которыйделя И и ведомой полумуфты 21 в осевом
осуществляет затяжку резьбового соедине-направлении до упора в основание пазов
ния. Когда сопротивление завинчиванию нач- 33 упорного кольца 31, образуя зазор вдоль нет возрастать и превысит начальный мо-оси между его прямоугольными выступами
мент закрутки тарированной пружины 25,29 и торцом секторных ступенчатых выстуустановленный при сборке ее со шпинде- 35 пов 24 ведомой полумуфты 21, как показано лем 11 и ведомой полумуфтой 21, посиед-на фиг. 2, а затем при взаимном разняя, увеличивая закрутку тарированной пру-вороте шпинделя 11 и ведомой полумуфжины 25, начнет проворачиваться относи-ты 21 прямоугольные выступы 29 пальца 27
тельно шпинделя 11 вместе с опорным коль-и секторные ступенчатые выступы 24 займут
цом 31 упорного подшипника в направленииисходное относительно друг друга положе1 П nw iTTiiin rk TTiici а Т /- Л fGlfrf riUl tf АН.U а f Li Я V nOV Я ЧЯ МП НЯ ЖНГ .S И Л
33 упорного кольца 31, а прямоугольные выступы 28 упрутся в боковую поверхность секторных пазов 13 щпинделя 11.
Если же сначала произойдет осевое перемещение щпинделя 11, а затем взаимный разворот щпинделя 11 и ведомой полумуф- ть 21 в исходное положение, то палец 27, скользя прямоугольными выступами 29 по боковой поверхности секторных пазов 13
завинчивания, при этом секторные ступенчатые выступы 24 ведомой полумуфты 21 поворачиваются в пазах 14 шпинделя 11 и занимают такое положение, при котором прямоугольные выступы 29 пальца 27
ние, как показано на фиг. 5 и 8.
В принципе возврат деталей винтоверта в исходное положение может происходить одновременно с различными сдвигами по фазам движений, после чего винтоверт окакения.
сойдут с торцов больщей ступени сектор- 45 зывается вновь подготовленным к очередных выступов 24 ведомой полумуфты 21, иному циклу затягивания резьбового соеди- палец. 27 под действием давления воздуха и пружины 4, передаваемого на его торец стержнем 38, переместится в осевом направлении, сжимая пружину 30 до полного за 50
Формула изобретения
крытия пневмоклапана 3. При этом из-за прекращения подачи воздуха пневмодвигатель 5 останавливается, что служит сигналом о достижении предельного момента затяжки резьбового соединения.
При снятии инструмента 18 с затянутого
Пневматический винтоверт, содержащий корпус, расположенные в нем подпружиненный в осевом направлении впускной пневмоклапан, имеющие осевые отверстия пневмодвигатель с редуктором, установленный в осевых отверстиях последних стержень для
llpn СНПГИИ MnClpyMCHla 10 .- .iai/tnylUIU J.OIM W l l ПЛЛ ,. . - .
резьбового соединения тарированная пружи-° периодического взаимодействия с впускным
на 25 будет разворачивать относительнопневмоклапаном, установленный с возмож друг друга шпиндель 11 и ведомую полумуфту 21 до исходного положения, т. е. до
ностью осевого перемещения шпиндель, имеющий на одном конце инструмент и кинедет до начала осевого перемещения шпинделя 11, как показано на фиг. 7 и 10, то палец 27 через прямоугольные выступы 29 будет повернут ступенчатыми выступами 24 ведомой полумуфты 21 из своего исходного относительно шпинделя 11 положения на угол поворота ведомой полумуфты 21- относительно шпинделя 11 из промежуточного до исходного положения. В дальнейшем
g лец 27. Если взаимный разворот щпинде- ля П и ведомой полумуфты 21 произой„.,
торных ступенчатых выступов 24 ведомой полумуфты 21, и упрется в основание пазов
.. .
шпинделя 11, сместится относительно шпин деля И и ведомой полумуфты 21 в осевом
33 упорного кольца 31, а прямоугольные выступы 28 упрутся в боковую поверхность секторных пазов 13 щпинделя 11.
Если же сначала произойдет осевое перемещение щпинделя 11, а затем взаимный разворот щпинделя 11 и ведомой полумуф- ть 21 в исходное положение, то палец 27, скользя прямоугольными выступами 29 по боковой поверхности секторных пазов 13
исходное относительно друг друга положеU а f Li Я V nOV Я ЧЯ МП НЯ ЖНГ .S И Л
ние, как показано на фиг. 5 и 8.
В принципе возврат деталей винтоверта в исходное положение может происходить одновременно с различными сдвигами по фазам движений, после чего винтоверт окакения.
зывает ному
новь подготовленным у затягивания резьбов
Формула изобретения
зывается вновь подготовленным к очередному циклу затягивания резьбового соеди-
Пневматический винтоверт, содержащий корпус, расположенные в нем подпружиненный в осевом направлении впускной пневмоклапан, имеющие осевые отверстия пневмодвигатель с редуктором, установленный в осевых отверстиях последних стержень для
J.OIM W l l ПЛЛ ,. . - .
периодического взаимодействия с впускным
пневмоклапаном, установленный с возмож
ностью осевого перемещения шпиндель, имеющий на одном конце инструмент и кинеМ1атически связанный другим концом через в1едомую и ведущие полумуфты с редуктором, и тарированную пружину, отличающийся тем, что, с целью повышения на дежности за счет изменения кинематической связи шпинделя с редуктором и пневмо- клапаном, шпиндель выполнен с буртиком в средней части, имеющим диаметрально расположенные радиальные пазы, с центральным глухим отверстием и диаметраль- ф расположенными секторными пазами на фрце, ведомая полумуфта установлена на фпинделе с возможностью ограниченного rioBOpOTa, подпружинена в осевом и тангенциальном направлениях тарированной пру- ) и выполнена с продольными пазами на одном торце, диаметрально расположенными радиальными пазами на другом торце и ступенчатыми секторными выступами на {внутренней поверхности для взаимодействи5э 4 боковыми поверхностями секторных па- Зов шпинделя, ведущая полумуфта выполнена с продольными прямоугольными выступами, ответными продольным ведомой полумуфты, тарированная пружина выполнена с осевыми выступами для взаимодействия с радиальными пазами шпинделя и ведомой полумуфты, а винтоверт снабжен размещенным в центральном глухом отверстии шпинделя подпружиненным в осевом и тангенциальном направлениях для взаимодействия торцом со стержнем пальцем, имеющем диаметрально расположенные две пары прямоугольных выступов для периодического взаимодействия с боковыми поверхностями секторных пазов шпинделя и ступенчатых выступов ведомой полумуфты, и упорным подшипником, включающим OX- ватывающее шпиндель опорное кольцо с радиальными выступами для взаимодействия с продольным пазом ведомой полумуфты и диаметральным пазом на торце, ответным паре прямоугольных выступов пальца, закрепленную в шпинделе втулку с бур- тиком и тела качения, размещенные между торцами опорного кольца и буртика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический винтоверт | 1984 |
|
SU1284818A1 |
| Пневматический винтоверт | 1987 |
|
SU1452672A1 |
| Многошпиндельный гайковерт (его варианты) | 1979 |
|
SU1183358A1 |
| Устройство для соединения монтажныхпРОВОдОВ CO шТыРЕВыМи ВыВОдАМи | 1979 |
|
SU845202A1 |
| Стационарный винтоверт с двумя ступенями завинчивания | 1976 |
|
SU770775A1 |
| Ударный гайковерт | 1981 |
|
SU1004092A1 |
| Гайковерт | 1990 |
|
SU1775287A1 |
| Плавающий патрон | 1979 |
|
SU941020A1 |
| Ударный гайковерт | 1982 |
|
SU1060456A1 |
| Ударный гайковерт | 1982 |
|
SU1147557A2 |
Изобретение относится к ручному механизированному инструменту с регулируемым моментом затяжки. Цель изобретения - повышение надежности за счет изменения кинематической связи шпинделя с редуктором. Ведущая полумуфта 19 выполнена с прямоугольным выступом 20, ведомая полумуфта 21 - с ответным продольным пазом 22, внутренними секторными ступенчатыми выступами 24 и диаметральными пазами для взаимодействия с выступами 26 тарированной пружины 25. Шпиндель 11 имеет радиальные 16 и секторные 13 пазы для взаимодействия с выступами 26 тарированной пружины 25 и секторными ступенчатыми выступами 24. При нажатии инструментом, закрепленным на шпинделе 11, последний перемещается в осевом направлении совместно с ведомой полумуфтой 21 и пальцем 27, который передает движение стержню 38, открывающему впускной пневмоклапан. Под давлением поступающего воздуха пневмодвигатель вращается и через редуктор, ведущую 19 и ведомую 21 полумуфты и тарированную пружину 25 вращает шпиндель 11. При достижении предельного момента тарированная пружина 25 закручивается на угол, при этом ведомая полумуфта 21 разворачивается относительно шпинделя 11, прямоугольные выступы 2 и 29 пальца 27 сходя с торца большей ступени секторных ступенчатых выступов 24 и палец 27 под давлением усилий пружины впускного пневмоклапана и давления воздуха, передаваемого на него стержнем 37, перемещается в осевом направлении, выпускной пневмоклапан перекрывает поступление воздуха, и пневмодвигатель останавливается. 10 ил.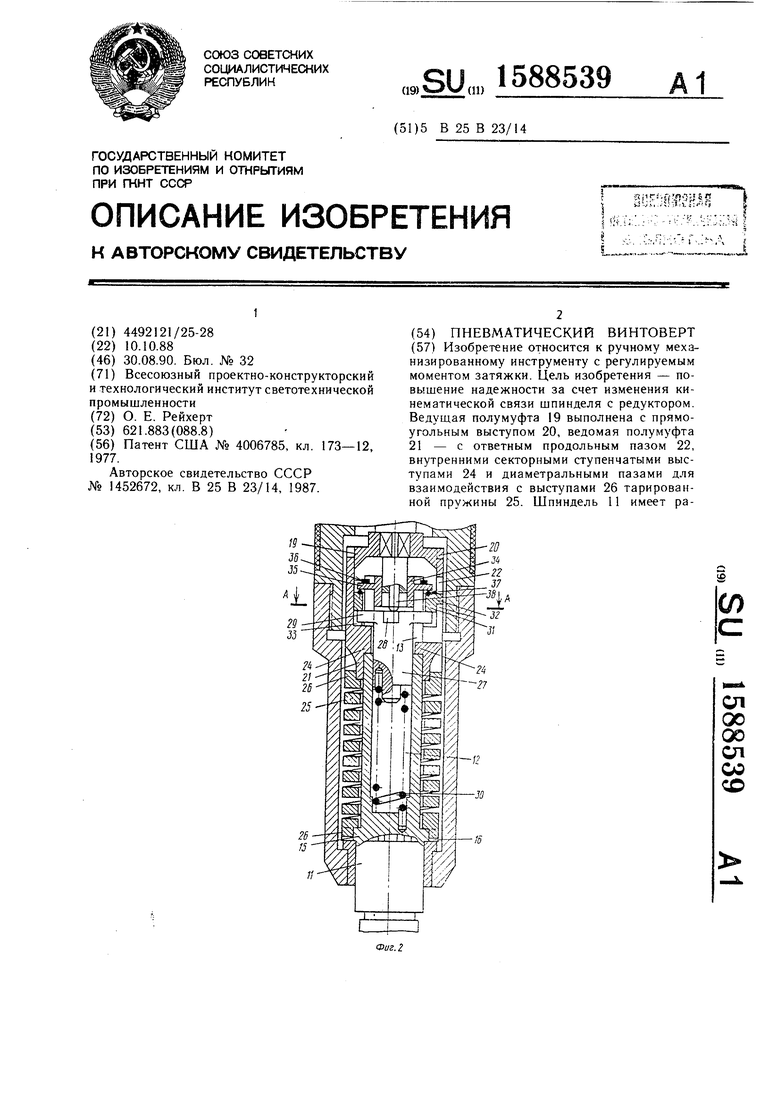
Фиг.
19Фиг.з
29
и
Фиг.б
24
24
37 31
Фиг. 7
28
Фаг. 8
Фаг. 9
Вид д
Фиг. W
| Патент США № 4006785, кл | |||
| Джино-прядильная машина | 1922 |
|
SU173A1 |
| Пневматический винтоверт | 1987 |
|
SU1452672A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
