31
тЬнавливают ползун 11 на.стойке 10 нЬ высоте, соответствующей глубине залегания дефекта 1. В ходе изменения расстояния между стойкой 10 и корпусом 1 (сканирования) цилиндр 12 направляющего элемента вместе с расположенной в его отверстии 13 планкой 18 поворачивается вокруг (своей оси. Планка 18 через звенья
589200
8 и 9 перемещают шарнир 5 в направляющем пазу.З корпуса 1 и через звено 7 поворачивает звено 6 вокруг шарнира t. В результате угол наклона пьезоэлемента меняется таким образом, что его акустическая ось всегда попадает в исследуемую точку сечения дефекта 17. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового контроля изделий | 1987 |
|
SU1456872A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1991 |
|
RU2032172C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ, ИМЕЮЩИХ СЛОЖНУЮ ФОРМУ ТЕЛ ВРАЩЕНИЯ | 2000 |
|
RU2174227C1 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1755174A1 |
| АКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕРАЗРУШАЮЩЕГО УЛЬТРАЗВУКОВОГО ЛОКАЛЬНОГО КОНТРОЛЯ КАЧЕСТВА ТРУБ | 2016 |
|
RU2623821C1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| Способ ультразвукового теневого контроля изделий и устройство для его осуществления | 1985 |
|
SU1320742A1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ ТРУБ И ТРУБОПРОВОДОВ | 1999 |
|
RU2149394C1 |
Изобретение относится к акустическим методам неразрушающего контроля. Цель изобретения - повышение точности и производительности определения параметров дефектов за счет обеспечения автоматического пересечения излучаемого ультразвукового (УЗ) пучка при различных углах ввода в одной точке в ходе сканирования. Фиксируют на поверхности изделия 16 стойку 10 с магнитным держателем 15 над дефктом 17 и устанавливают полузн 11 на стойке 10 на высоте, соответствующей глубине залегания дефекта 17. В ходе изменения расстояния между стойками 10 и корпусом 1 (сканирования) цилиндр 12 направляющего элемента вместе с расположенной в его отверстии 13 планкой 18 поворачивается вокруг своей оси. Планка 18 через звенья 8 и 9 перемещает шарнир 5 в направляющем пазу 3 корпуса 1 и через звено 7 поворачивает звено 6 вокруг шарнира 4. В результате угол наклона пьезоэлемента 14 меняется таким образом, что его акустическая ось всегда попадает в исследуемую точку сечения дефекта 17. 2 ил.
Изобретение относится к акусти- Ц0СКИМ методам неразрушающего конт- рЬля и может быть использовано при ультразвуковой (УЗ) дефектоскопии изделий при определении параметров дефекта.
Цель изобретения - повышение точности и производительности опреде- ления параметров дефектов за смет пересечения излучаемого УЗ-пучка при различных углах ввода в одной точке поверхности дефекта, автоматически происходящего в ходе сканирования изделия.
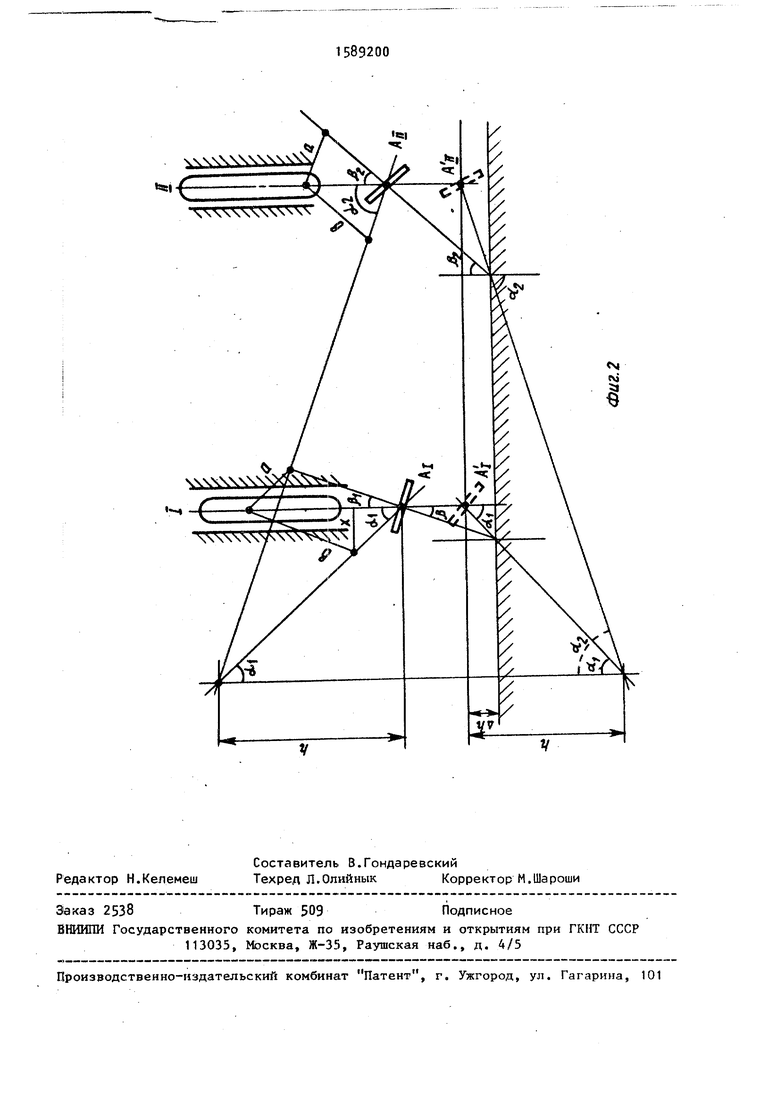
Иа фиг. 1 представлено устройство для УЗ-контроля с переменным углом ввода; на фиг. 2 - кинематическая схема, иллюстрирующая его работу,
Устройство для контроля с переменным углом ввода содержит корпус 1 С рабочей поверхностью 2 и направляющим пазом 3, перпендикулярным его рабочей .поверхности 2, и два шарнира и 5, установленные в корпусе 1 так, что их оси вращения параллельны его рабочей поверхности 2. Первый шарнир k закреплен в корпусе 1 на линии, проходящей от паза 3 к рабочей поверхности 2 корпуса 1, а второй шарнир 5 установлен с возможностью перемещения вдоль направляющего паза 3f Устройство также содержит первое звено б, взаимодействующее с шарниром i, второе звено 7,. взаимодействующее с шарниром 5, третье звено 8, взаимодействующее с шарниром 5, и четвертое звено 9, взаимодействующее с шарниром it. Кроме того, устройство содержит стойку 10, установленный с возможностью перемещения вдоль стойки 10 и фиксации на ней ползун 11 и направляющий элемент, выполненный в. виде цилиндра 12 с отверстием 13, установ
ленный с возможностью вращения вок0
руг своей оси на ползуне 11. Ось вращения цилиндра 12 параллельна осям вращения шарниров k и S- Отверстие 13 цилиндра 12 перпендикулярно его оси вращения и проходит через нее. Устройство еще содержит пьезоэлемент lA, жесткб связанный с звеном 6 так, что его акустическая ось параллельна планке 6, а
ось вращения проходит через его
центр и магнитный держатель 15,закрепленный на стойке 10 таким образом, что при его установке на контролируемое изделие 16 с дефектом 17 стойка 10 располагается параллельно
° пазу 3 корпуса 1. Звенья 6-9 образуют шарнирный параллелограмм, в виде которого выполнен механизм поворота пьезоэлемента k. Устройство также содержит направляющую планку
5 18, проходящую через отверстие 13 цилиндра 12 и жестко связанную со звеном 9. Длины а и b звеньев 7 и 9, 6 и 8 соответственно выбраны из
соотношения 40
а/Ь sino(/sin/5 ,
где d - угол ввода УЗ-колебаний в
материал изделия I6j 5 U - угол падения УЗ-колебаний на рабочую поверхность 2 корпуса 1;
- скорость распространения УЗ-колебаний в материале 50 изделия 1б
С . - скорость распространения УЗ-колебаний в материале
корпуса 1 на участке от пье- зозлемента lA до рабочей 55 поверхности 2 корпуса 1 .
Устройство для УЗ-контроля с переменным углом ввода работает следующим образом.
15892
to
25
Для зафиксированного при обычном УЗ-контроле дефекта 17 изделия 16 определяют глубину залегания и отмечают на поверхности изделия 16 место над дефектом 17. Устанавливают на по- верхности изделия 16 устройство тэк, чтобы стойка 10 с магнитным держателем 15 находилась над дефектом 17 Устанавливают ползун 11 на стойке 10 в положение, соответствующее глубине залегания обнаруженного дефекта 17 (для удобства на стойке 10 нанесена шкала), и фиксируют его в этом положении Перемещают по поверхности изделия 16 корпус 1 из положения I в положение II (фиг. 2), изменяя расстояние между стойкой 10 и корпусом 1. При этом цилиндр 12 направляющего элемента поворачивается вокруг своей оси и заставляет повернуться вставленную в его отверстие 13 нап- равляющую планку 18. Планка 18 через звенья 8 и 9 вызывает перемещение шарнира 5 в направляющем пазу 5, в результате чего через звено 7 вращательное движение передается звену 6 а пьезоэлемент 1 вращается относи- тельно оси шарнира 4. Угол наклона пьезоэлемента И меняется механизмом поворота с изменением расстояния таким образом, что его акустическая ось всегда попадает в исследуемую точку сечения дефекта 17. Пересечение акустических лучей в одной точке обусловлено как выбором длин а и Ь звеньев 6 - 9 параллелограмма в зависимости от скорости распространения УЗ- колебаний в материалах изделия 1 и корпуса 2, так и выбором расстояния от плоскости, параллельной поверхности контролируемого изделия 16 и проходящей через геометрический центр пьезоэлемента Ц до оси вращения цилиндра 12, равным глубине залегания дефекта 17, увеличенной на высоту расположения мнимого излучателя над поверхностью изделия 16. Увеличение вызвано необходимостью учета пути, проходимого УЗ-колеба- ниями в корпусе 1, и осуществляется приведением действительного излучеГд nf - 2) к минимуму (, А 5 на фиг. 2), расположенному на продолжении луча в материале изелия 16 в корпус 1, на расстояние, авное действительному пути УЗ-коле- аний в корпусе 1, уменьшенному в оответствии с отношением скоростей
.с 15 20
30 о 35 в 40 Д п зо вы 45 ло ра на ле мо 50 ля ра не же ко с жес что это чер
55
1589200
оо- ,
распространения 3-колебаний в материалах корпуса 1 и контролируемого изделия 16. В процессе перемещения корпуса 1 пьезоэлементом 1/, излучают в изделие 16 УЗ-колебания и принимают отраженные от дефекта 17 эхо- импульсы, измеряют их амплитуду для каждого нового положения пьезоэлемента Ц, получают кривую зависимости амплитуды от угла ввода и по форме кривой определяют конфигурацию и ориентацию дефекта.
МП J ;;r ° использова- но с УЗ-преобразователем с переменным углом ввода, включающим призму с отверстием и размещенную в нем конусную или цилиндрическую поворотную вставку с пьезоэлементом.
25
Формула изобретения
Устройство для ультразвукового контроля с переменным углом ввода содержащее корпус с рабочей поверхностью, установленный в корпусе пьезоэлемент и связанный с ним механизм поворота пьезоэлемента, отличающееся тем, что, с целью повы- шения точности и производительности 30 определения параметров дефектов, оно снабжено стойкой,, ползуном, установленным с возможностью перемещения вдоль стойки и фиксации на ней, установленным на ползуне с возможностью 5 вращения вокруг своей оси направляющим элементом, выполненным в виде цилиндра с отверстием, перпендикулярным оси цилиндра и проходящим через нее, и направляющей планкой, прохо- 0 Дящей через отверстие цилиндра, корпус выполнен с перпендикулярным его рабочей поверхности направляющим пазом, механизм поворота пьезоэлемента выполнен в виде шарнирного паралле- лограмма, два противоположных шарнира которого установлены на корпусе на одной прямой, один из них установлен неподвижно, а другой - с возможностью перемещения вдоль направ- ляющего паза корпуса, одно звено параллелограмма, взаимодействую1чее с неподвижно установленным шарниром жестко связано с направляющей планкой, другое звено, взаимодействующее с неподвижно установленным шарниром, жестко связано с пьезоэлементом так, что его акустическая ось параллельна , этому звену, а ось вращения проходит, через его центр.
vv
- -Ь- :0
«м
Л)
| Ультразвуковой искатель с переменным углом ввода | 1976 |
|
SU728076A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобритании W 1482077 кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| л .га:-гк | |||
