Изобретение относится к машиностроению, а именно к конструкциям зубчато-рычажных механизмов, обеспечиваюидих периодическое движение в одном направлении без разрыва кинематической депи, и может быть применено в средствах автоматизации кузнечно-штамповочного оборудования, где возникает необходимость в преобразовании постоянного вращательного движения в неравномерное движение с заданными точными интервалами выстоя и перемещения с оптимальными кинематическими параметрами.
Цель изобретения - повышение точности выстаивания выходного звена при увеличенном диапазоне углов поворота входного кривошипа и расширение функциональных возможностей привода за счет увеличения длительности и числа позиций выстаивания.
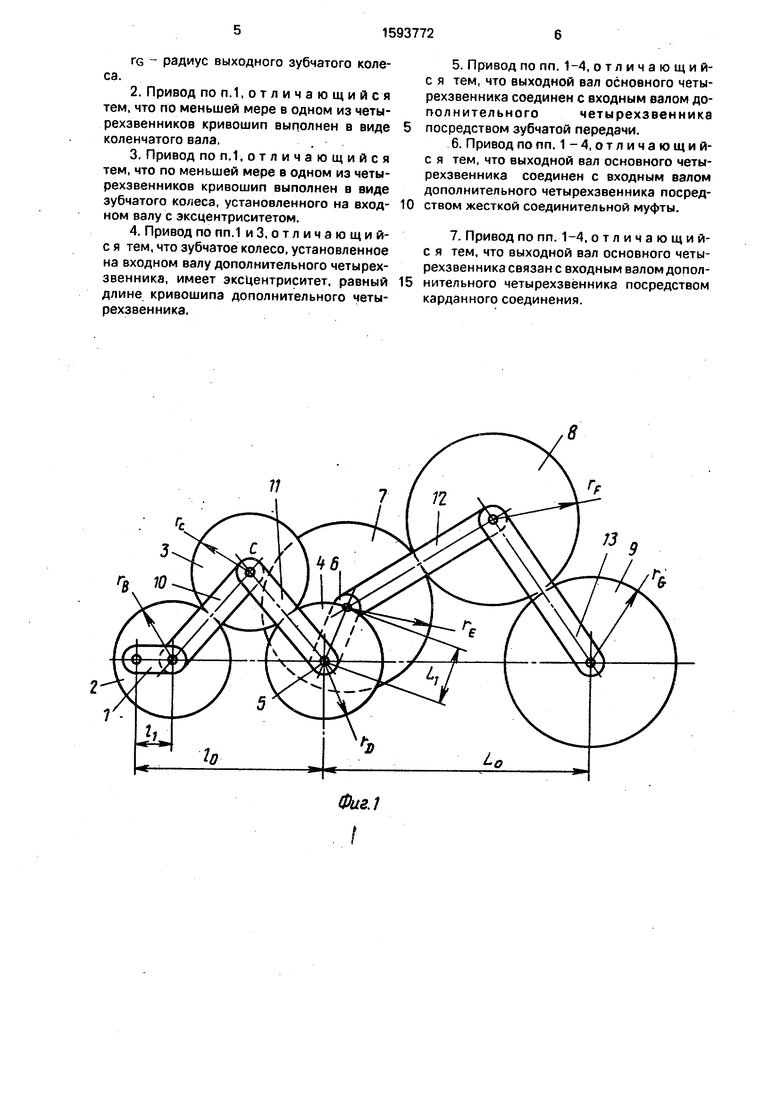
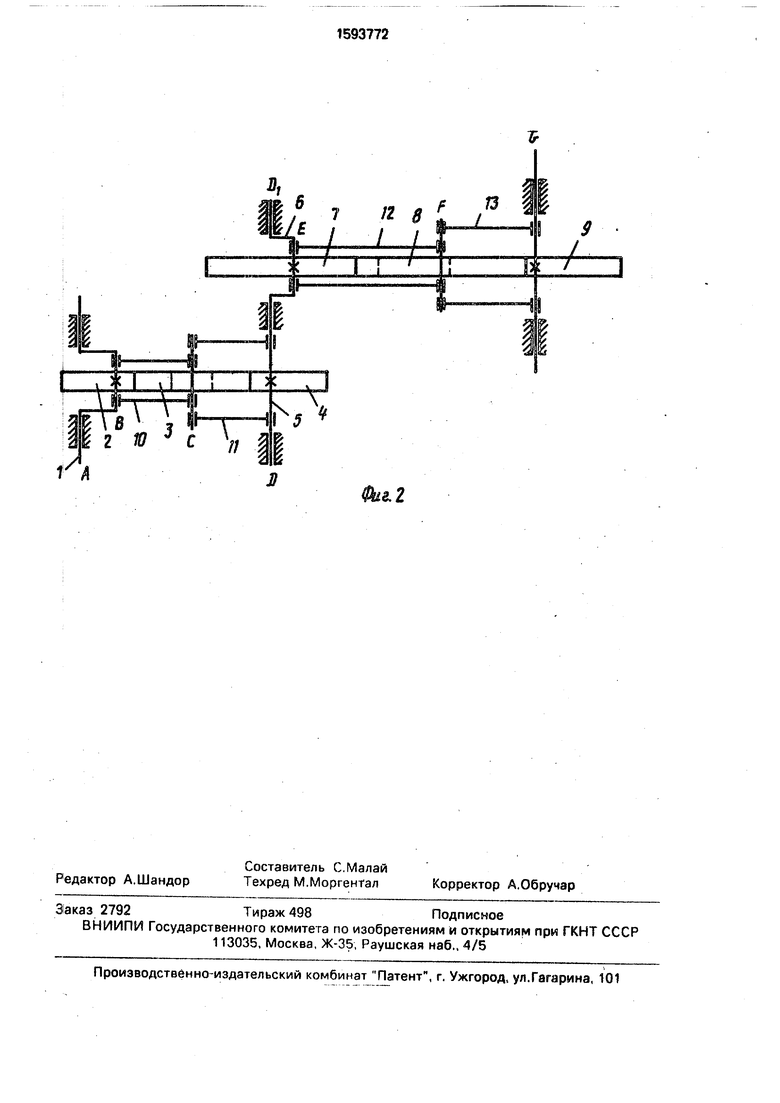
На фиг.1 изображена схема привода механизма с длительным выстоем выходного звена; на фиг.2 - привод механизма, вид сверху.
Механизм состоит из кривошипного вала 1 (кривошипа), зубчатой шестерни 2, жесл ю
СА) VJ
Ю
стко связанной с этим кривошипным валом, промежуточного зубчатого колеса 3, выходного зубчатого колеса 4, вал 5 которого расположен соосно с ог1Орами кривошипа 6 и жестко соединен с ним. На кривошипе 6 жестко закреплено зубчатое колесо 7, которое через сателлит 8 передает вращение на зубчатое колесо 9. Валы и оси всех зубчатых колес соединены между собой тягами 10 13. При этс кривошип 6 имеет дойну Ц (0,02 - 0,3 п LO, а радиусы начальных окружностей зубчатых колес равны: колеса 7 ГЕ LI /(0,33 - 0,945 ); колеса 8 гр (0,68 - 5,0) ГЕ; колеса 9 гс П-ГЕ, где п - число позиций выстаивания выходного звена при- вода, LO - расстояние между осью опор кривошипа 6 и выходным валом зубчатого колеса 9.
В некоторых случаях (при малых значениях LI) по конструктивным соображениям вместо кривошипа 6 и зубчатой шестерни 7 целесообразно использовать шестерню с эксцентриком, т.е. вал 5 (ось DDi) жестко соединить с шестерней 7 со смещением от ее центра на величину Li, тяга ,12 в этом случае превращается в шатун, большая головка которого охватывает эксцентрик на шестерне 7, а малая соединяется с шарниром F. Тоже самое относится и к сочленению кривошипа 1 с шестерней 2,
Жесткое соединение выходного вала 5 с кривошипом 6 дополнительного четырех- звенника может быть осуществлено не только непосредственно (фиг,2, ось DDi), но и через любой жесткий соединительный эле- мент (жесткую муфту, зубчатые зацепления, карданную передачу и т.п.),
Привод работает следующим образом. При вращении ведущего кривошипа 1 жестко связанная с ним зубчатая шестерня 2поворачивается относительно оси А и приводит в движение колесо 3, которое, в свою очередь, приводит в движение с выстаиванием в определенной позиции и обратным поворотом или без него (в зависимости от длительности выстаивания) зубчатое колесо 4 и жестко связанный с ним вал 5, являющийся также валом кривошипа 6. При повороте кривощипа 5 приводится во вращение относительно оси DDi (фиг.2) жестко связанное с ним зубчатое колесо 7, приводящее в движение зубчатое колесо В, а через него - выходное зубчатое колесо 9, выходной вал которого в определенном положе- НИИ совершает выстаивание на угле поворота кривошипного вала 6, |эавнрм или несколько большем, чем угол обратного хода зубчатого колеса 4.
Выходной вал механизма (опора G) может занимать любое начальное положа 1ие (на окружности радиусом U) относительно оси D, т.е. угол ADC5 может изменяться в пределах О - 360° (фиг.1).
Проведенные расчеты и экспериментальные исследования моделей привода по- казывают, что точность выстаивания выходного вала в предложенном приводе механизма с длительным выстоем выходного звена может быть получена в пределах ± 0,01° ( ± 36 ) в диапазоне угла поворота вала входного кривошипа до 180° и составит величину не более ± 0,2° ( ±12 ) в интервале 230°. Такие отклонения легко компенсируются за счет конструктивных и технологических зазоров в зубчатых зацеплениях колес и шарнирах механизма, поэтому выходной вал имеет практически точный выстой без отклонений.
Применение предлагаемой конструкции привода позволяет увеличить угол выстаивания выходного звена и его точность, а также расширить функциональные возможности привода за счет увеличения числа позиций выстаивания при повышенной точности выстаивания.
Формула изобретения
1. Привод механизма с длительным выстоем выходного звена, содержащий зубчато-рычажный трехколесный шарнирный четырехзвенник с передаточным отношением, равным единице, отличающийся тем, что, с целью повышения точности выстаивания выходного звена при увеличенном диапазоне углов поворота входного кривошипа и расширение функциональных возможностей привода за счет увеличения длительности и числа позиций выстаивания, он снабжен дополнительным зубчато-рычажным четырехзвенником, кривошип которого соосно и жестко соединен с выходным валом основного шарнирного четырехзвен- ника, при этом длина Li кривошипа дополнительного четы рехзвенника равна (0,02...0,3 п LO, где п - число позиций выстаивания выходного звена привода: LO - расстояние между осью опоры кривошипа дополнительного четырехзвенника и валом выходного зубчатого колеса, а радиусы начальных окружностей зубчатых колес дополнительного четырезвенника определяют из зависимостей
ГЕ Li/(0,33,,,0,945
гр (0,68,..5,00) ГЕ;
ГС п ТЕ.
где ГЕ - радиус зубчатого колеса, жестко связанного с кривошипом;
гр - радиус сателлита:
са.
TG - радиус выходного зубчатого коле2.Привод по п.1. от л и ч а ю щи йс я тем, что по меньшей мере в одном из четы- рехзвенников кривошип выполнен в виде коленчатого вала.
3.Привод по П.1. отличающийся тем, что по меньшей мере в одном из четы- рехзвенников кривошип выполнен в виде зубчатого колеса, установленного на входном валу с эксцентриситетом,
4.Привод по ПП.1 иЗ, отличающий- с я тем, что зубчатое колесо, установленное на входном валу дополнительного четырех- звенника, имеет эксцентриситет, равный длине кривошипа дополнительного четы- рехзвенника.
5.Привод по пп. 1-4, отличающий- с я тем, что выходной вал основного четы- рехзвенника соединен с входным валом до- полнительногочетырехзвенника посредством зубчатой передачи.
6.Привод по пп. 1 -4, отличающий- с я тем, что выходной вал основного четырехзвенника соединен с входным валом дополнительного четырехзвенника посредством жесткой соединительной муфты.
7. Привод по пп. 1-4, о т л и ч а ю щ и й- с я тем, что выходной вал основного четырехзвенника связан с входным валом дорол- нительного четырехзвенника посредством карданного соединения.

| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| Кулачково-зубчато-рычажный механизм | 1967 |
|
SU468047A1 |
| Привод механизма переноса для многопозиционных штамповочных автоматов | 1985 |
|
SU1328047A2 |
| Преобразователь непрерывного вращения в одностороннее прерывистое | 1990 |
|
SU1763768A1 |
| Многопозиционный автомат для холодной объемной штамповки изделий | 1986 |
|
SU1424930A1 |
| КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ВОСПРОИЗВЕДЕНИЯ ПЕРИОДИЧЕСКОГО ПОВОРОТА | 1992 |
|
RU2057977C1 |
| Кулачково-зубчато-рычажный механизм | 1983 |
|
SU1114833A1 |
| Промышленный робот | 1984 |
|
SU1268252A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| Станок для фасонного строгания | 1982 |
|
SU1077720A1 |
Изобретение относится к машиностроению, а именно к конструкциям зубчато-рычажных механизмов, обеспечивающих периодическое движение в одном направлении без разрыва кинематической цепи, и может быть применено в средствах автоматизации кузнечно-штамповочного оборудования. Цель изобретения - повышение точности выстаивания выходного звена при увеличенном диапазоне углов поворота входного кривошипа привода механизма с длительным выстоем выходного звена и расширение его функциональных возможностей за счет увеличения длительности и числа позиций выстаивания. Зубчато-рычажный трехколесный шарнирный четырехзвенник с передаточным отношением, равным единице, снабжен дополнительным зубчато-рычажным четырехзвенником с регламентированным соотношением конструктивных параметров. Кривошип дополнительного четырехзвенника соосно и жестко соединен с выходным валом основного четырехзвенника. При повороте кривошипа приводится во вращение жестко связанное с ним зубчатое колесо. Последнее приводит в движение через сателлит выходное зубчатое колесо. Выходной вал при этом в определенном положении выстаивается. За счет регламентированного соотношения конструктивных параметров дополнительного четырехзвенника увеличивается угол выстаивания выходного звена и его точность. 2 ил., 6 з.п. ф-лы.
В
Фиг,1
. I
g.2
| Вирабов Р.В., Щекутьев Е.Е | |||
| Расчеты и проектирование кулачково-зубчато-рычаж- ных механизмов периодического поворота | |||
| - Машиностроение, 1970, N;3, |
