ND
О5
00
ГчЭ С71
o
Изобретение относится к автоматизации технологического оборудования, преимущественно листоштамповочных прессов, и может быть использовано для подачи Е5 штамп штучнь х листовых заготовок и удаления отштампованных деталей и отходов с помощью роботов-манипуляторов.
Цель изобретения - повышение надежности и экономичности работы путем выполнения кинематической связи руки промышленного робота с приводом возвратновращательного перемещения в виде рычажно-зубчатого планетарного механизма трехколесного четырехзвенника с выстоем ведомого звена.
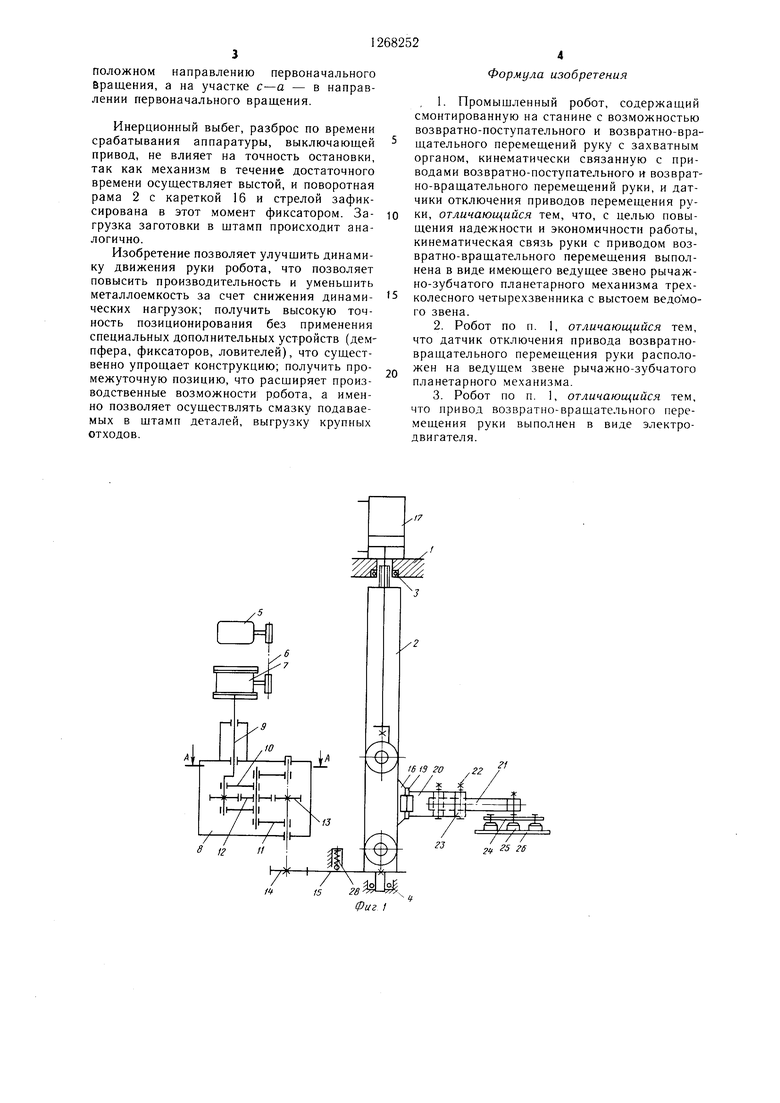
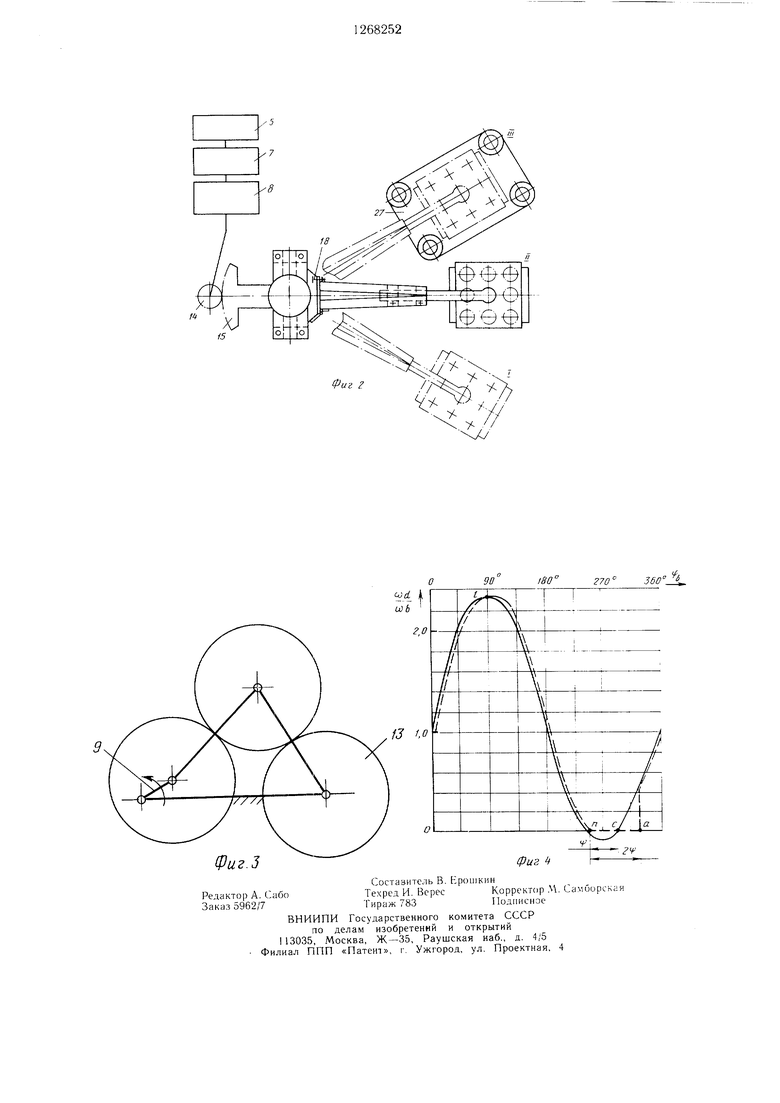
На фиг. 1 изображен промышленный робот к листоштамповочному прессу, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - схема зубчаторычажного механизма трехколесного четырехзвенника; на фиг. 4 - характеристика - передаточное число в функции угла поворота ведущего звена.
Промышленный робот содержит станину 1, поворотную раму 2, вращающуюся в подшипниках 3 и 4 станины, привод, который содержит двигатель 5, ременную передачу 6, редуктор 7 и рычажно-зубчатый планетарный механизм трехколесного четырехзвенника 8.
Выходной вал редуктора 7 соединен с кривошипом 9 механизма трехколесного четырехзвенника 8. Кривощип 9 через шатун 10, коромысла 11 и шестерню 12 соединен с выходным звеном 13 механизма трехколесного четырехзвенника 8.
На выходной вал механизма 8 посажена шестерня 14, входящая в зацепление с сектором 15, закрепленным на раме 2. В на 1равляющих рамы установлена каретка 16, перемещаемая в вертикальной плоскости цилиндром 17. На каретке 16 с помощью болтов 18 и шарнира 19 установлена рука, состоящая из стрелы 20 и штока 21, закрепленного болтами 22 в посадочном месте 23 стрелы. На конце штока закреплена плита 24 с отверстиями для крепления захватных органов 25. Показаны также заготовка 26 и штамп 27. В крайних положениях поворотная рама вместе с рукой фиксируется шариковым фиксатором 28.
На фиг. 2 обозначены фиксированные по углу поворота позиции стрелы робота: положение I - рука над стопой заготовок, положение II - рука над тарой, положение III - рука над штампом. На фиг. 4 изображена зависимость передаточного числа
-: от угла поворота ведущего звена ф/,.
Сплошная линия - теоретическая кривая, пунктирная - с учетом зазоров в зацеплениях и соединениях рычагов. |з - теоретический угол обратного хода, 2г)) - максимальный угол выстоя механизма в случае,
когда суммарный люфт от ведущего звена механизма до руки, приведенных к ведомому звену механизма, равен теоретическому углу обратного хода ведомого звена механизма.
Промышленный робот работает следующим образом.
Исходным положением является положение II. После хода ползуна пресса, в момент его остановки в верхней мертвой точке, включается привод поворота рамы 2, т. е. двигатель 5, который через ременную передачу 6, редуктор 7,- механизм трехколесного четырехзвенника 8 приводит в движение сектор 15. В результате этого рама 2 поворачивается в положение III. Опускается каретка 16 со стрелой, включается питание захватных органов 29, притягивающих деталь и отходы, затем происходит подъем каретки со стрелой, отштампованной деталью и отходами, и поворот стрелы в положение П. В положении Н осуществляется кратковременный выстой стрелы, отключение захватных органов, удерживающих отходы, и сбрасывание отходов в тару. Выстой в положении II осуществляется без отключения привода. Далее стрела движется в положение 1, опускается каретка, отключаются захватные органы, удерживаюш.ие деталь, которая ложится в стопу. После этого стрела возвращается в положение II и ожидает окончания очередного хода пресса.
Применение зубчаторычажного механизма трехколесного четырехзвенника позволяет обеспечить оптимальную динамику поворота, точно останавливать стрелу, обеспечить промежуточную позицию для выгрузки отходов, и пуск двигателя без нагрузки и плавное нагружение.
Перемещение стрелы из положения I в положение И и из положения И - в положение III осуществляется за один оборот ведущего звена механизма. Ведомый вал также совершает один оборот. В положениях I, II, III угол поворота ведущего звена ф1, устанавливается при монтаже робота в пределах угла ij) (фиг. 4), т. е. в момент, когда ведомое звено осуществляет выстой. При нахождении угла ф/, в пределах угла i|; (точка С по характеристике, фиг. 4), происходит включение привода ведущего звена. (fb начинает возрастать. До момента выбора зазоров в зацеплениях и соединениях рычагов (точка а по характеристике) ведомое звено стоит. Затем ведомое звено плавно разгоняется до скорости, немного большей удвоенной скорости ведущего звена (точка е), и плавно останавливается (участок е-п). После точки п на теоретической характеристике передаточное число отрицательно, это означает, что ведомое звено механизма должно осуществлять реверс. Это не происходит из-за наличия люфтов в зацеплениях и соединениях рычагов. Практически на участке п-с происходит выбор зазора в передачах в направлении, противоположном направлению первоначального Вращения, а на участке с-а - в направлении первоначального вращения.
Инерционный выбег, разброс по времени срабатывания аппаратуры, выключающей привод, не влияет на точность остановки, так как механизм в течение достаточного времени осуществляет выстой, и поворотная рама 2 с кареткой 16 и стрелой зафиксирована в этот момент фиксатором. Загрузка заготовки в щтамп происходит аналогично.
Изобретение позволяет улучшить динамику движения руки робота, что позволяет повысить производительность и уменьшить металлоемкость за счет снижения динамических нагрузок; получить высокую точность позиционирования без применения специальных дополнительных устройств (демпфера, фиксаторов, ловителей), что существенно упрощает конструкцию; получить промежуточную позицию, что расширяет производственные возможности робота, а именно позволяет осуществлять смазку подаваемых в штамп деталей, выгрузку крупных отходов.
Формула изобретения
. Промышленный робот, содержащий смонтированную на станине с возможностью возвратно-поступательного и возвратно-вращательного перемещений руку с захватным органом, кинематически связанную с приводами возвратно-поступательного и возвратно-вращательного перемещений руки, и датчики отключения приводов перемещения руки, отличающийся тем, что, с целью повыщения надежности и экономичности работы, кинематическая связь руки с приводом возвратно-вращательного перемещения выполнена в виде имеющего ведущее звено рычажно-зубчатого планетарного механизма трехколесного четырехзвенника с выстоем ведомого звена.
2.Робот по п. 1, отличающийся тем, что датчик отключения привода возвратновращательного перемещения руки расположен на ведущем звене рычажно-зубчатого планетарного механизма.
3.Робот по п. 1, отличающийся тем, что привод возвратно-вращательного перемещения руки выполнен в виде электродвигателя.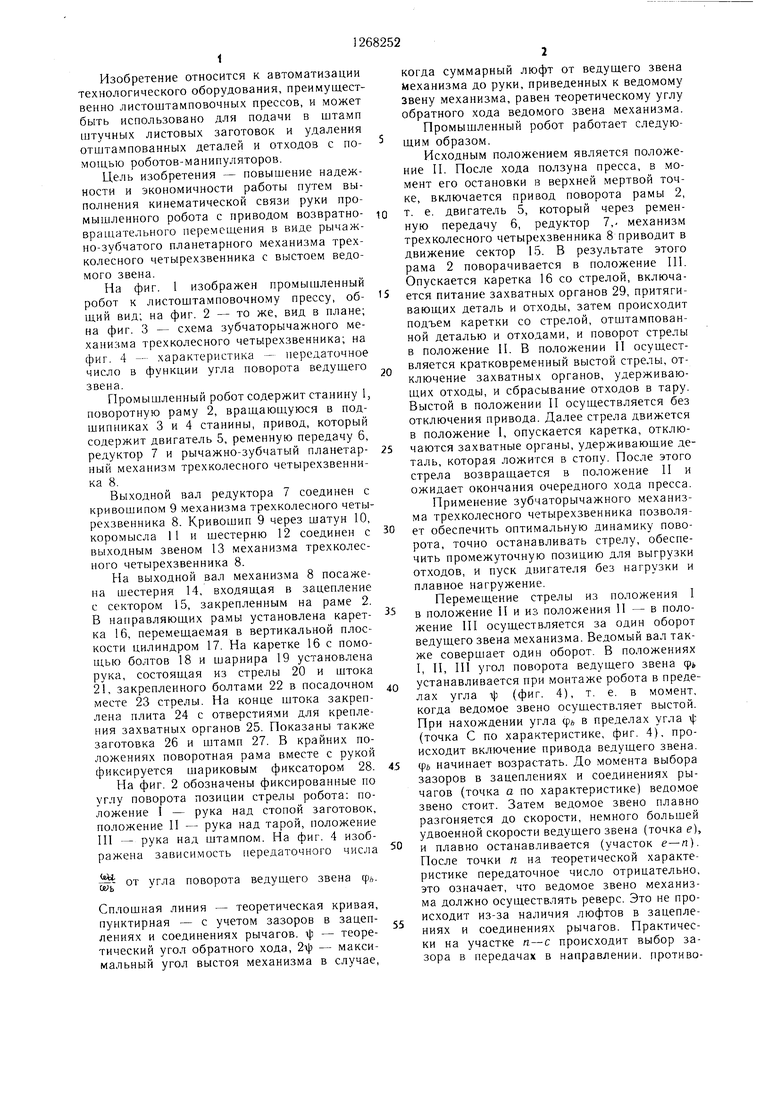
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1986 |
|
SU1301531A1 |
| Станок для фасонного строгания | 1982 |
|
SU1077720A1 |
| Валковая передача | 1982 |
|
SU1027460A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Зубчато-рычажное кулисное устройство с выстоем ведомого звена | 1975 |
|
SU539199A1 |
| Устройство для шаговой подачи полосового и ленточного материала | 1975 |
|
SU640863A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
| Привод механизма с длительным выстоем выходного звена | 1988 |
|
SU1593772A1 |
| Привод игольного двухфонтурной основовязальной машины | 1975 |
|
SU557132A1 |
| Шаговый привод | 1980 |
|
SU953298A1 |
Изобретение относится к автоматизации технологического оборудования и может быть использовано для подачи в штамп штучных заготовок с помощью роботов-манипуляторов. Целью изобретения является повьииение надежности и экономичности работы. Поставленная цель достигается за счет введения в кинематическую связь привода с рукой робота рычажно-зубчагого планетарного механизма трехколесного четырехзвенника с выстоем ведомого звена. 2 з.п. ф-лы, 4 ил.
| Шашкин А | |||
| С | |||
| Зубчаторычажные механизмы | |||
| М.: Машиностроение, 1971, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Манипулятор | 1978 |
|
SU774940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
