Изобретение относится к кузнечно-штам- повочному производству, может быть использовано в многопозиционных автоматах для объемной штамповки и является усовершенствованием изобретения по авт. св. № 1237293.
Цель изобретения - повышение точности позиционирования и снижение динамических нагрузок.
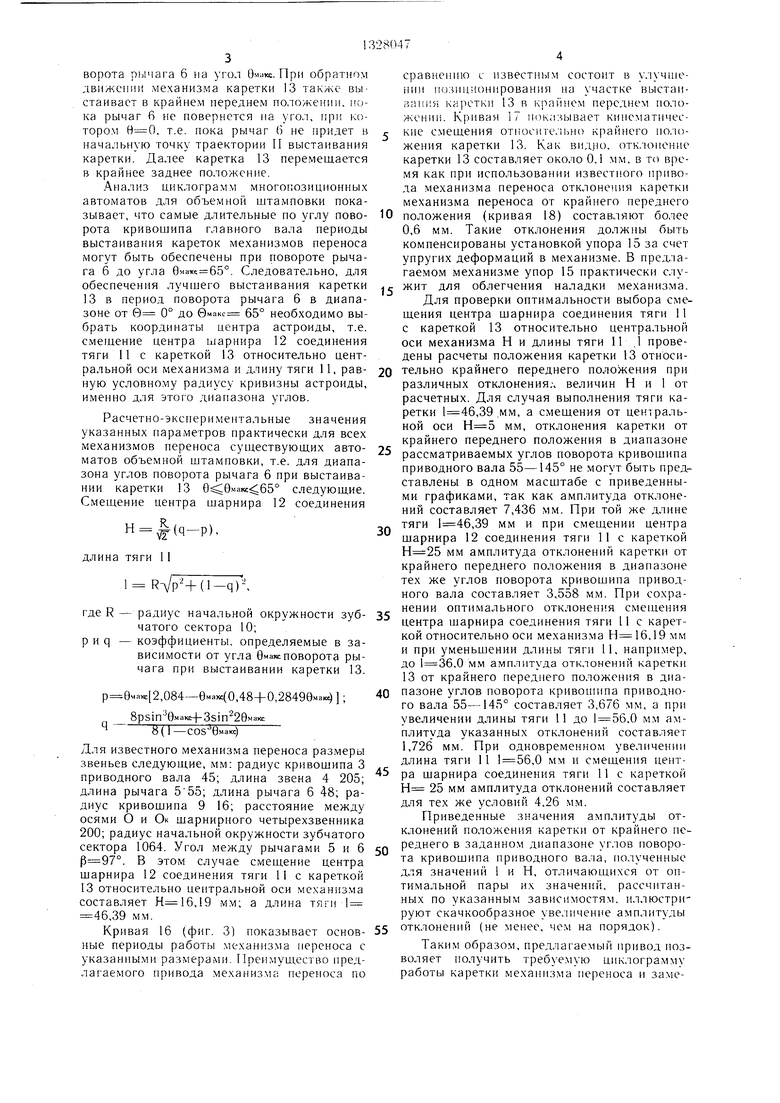
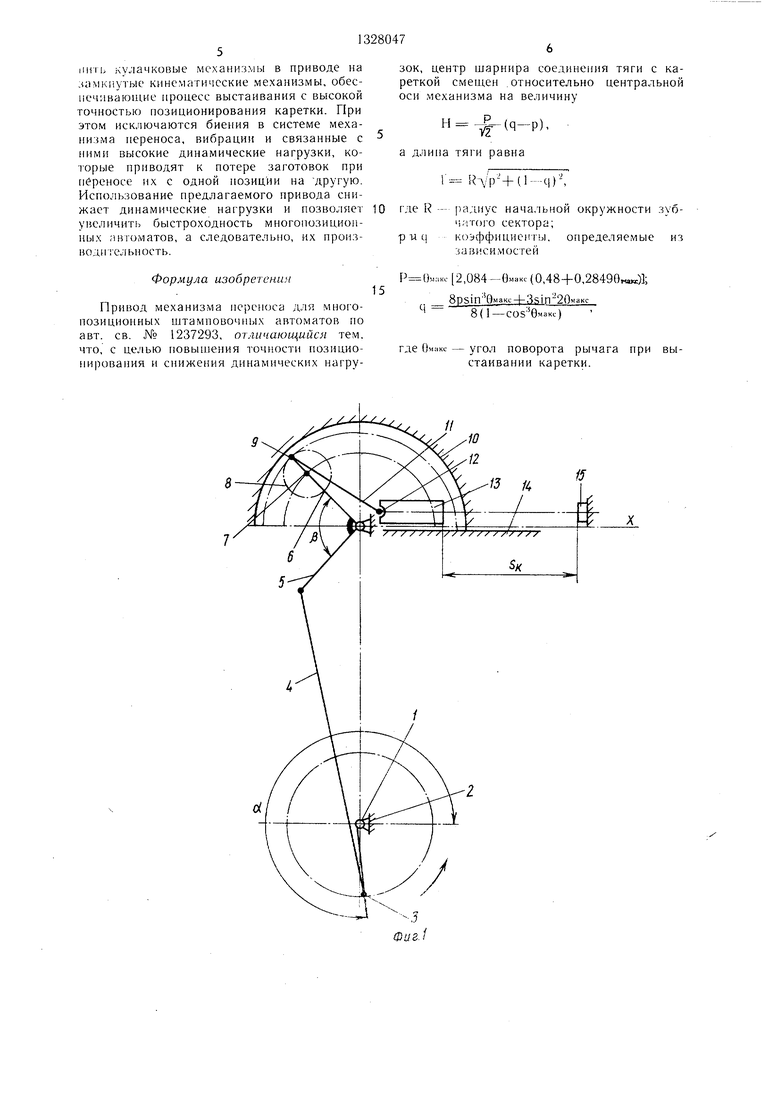
На фиг. 1 показана кинематическая схема привода механизма переноса при крайнем заднем положении каретки; на фиг. 2 - то же, при крайнем переднем положении каретки; на фиг. 3 - диаграмма переме- ш,ения каретки; на фиг. 4 - графики пере- меш,ений каретки механизма переноса вблизи крайнего переднего положения.
Привод механизма переноса многопозиционного высадочного автомата содержит приводной вал 1 коленчатого типа, смонтированный в станине 2 автомата. С кривошипом 3 вала 1 связаны рычаги 4 и 5 шарнирного четырехзвенника ОкАБО. С рычагом 5 жестко связан рычаг 6, на конце которого на оси 7 смонтирована шестерня 8, несущая кривошип 9, ось которого растырехзвенника и жестко связанного с ним рычага 6 относительно оси О незначительны. Ось 7, расположенная на конце рычага 6, и кривошип 9, расположенный в шестерне 8, в данный период движения лежат на одной прямой или в очень близком к ней положении, поэтому незначительное качание рычага 6 компенсируется движением обкатки шестерни 8 по зубчатому сектору 10. В результате этого кривошип 9 сохра- 10 няет свое положение, а каретка 13 выстаивает в заднем крайнем положении, выдерживая захваты на позиции штамповки.
При дальнейшем вращении приводного вала 1 от кривошипа 3 движение через ры- 15 чаг 4 передается рычагам 5 и 6, которые поворачиваются относительно шарнира О. При повороте рычага 6 шестерня 8, вращаясь на оси 7, обкатывается по зубчатому сектору 10. Поэтому кривошип 9 совершает сложное движение, которое складывается из перемещения оси 7 по окружности, радиус которой равен длине рычага 6, и вращательного движения кривошипа 9 относительно оси 7 при обкатывании шестерни 8 по зубчатому сектору 10. Если расстояние между осью 7 и
20
положена на начальной окружности шестер- 25 осью кривошипа 9 в три раза меньше дли- ни 8, а радиус кривошипа 9 в три разаны рычага 6 и ось кривошипа 9 находится
меньше длины рычага 6. Шестерня 8 находится в зацеплении с зубчатым сектором
10, жестко закрепленным на станине 2 автомата.
Кривошип 9 соединен тягой 11 посредством шарнира 12 с кареткой 13, которая смонтирована в направляющих 14 станины автомата. В каретке 13 расположены механизмы захвата заготовок и элементы упна начальной окружности шестерни 8, то кривошип 9 перемещается по алгебраической кривой, называемой астроидой.
В д анном случае астроида повернута 30 на угол 45° относительно координатных осей. За период движения по траектории I между точками В и Г происходит перемещение кривошипа 9 в горизонтальном направлении, равное по величине ходу каретки 13 механизма переноса SK Это равенство
равления ими (не показаны). Центр шарни- 35 объясняется тем, что ординаты точек В и Г ра 12 соединения тяги 11 с кареткой 13в принятой системе координат равны, а
смещен относительно центральной оси х механизма на величину
каретка 13 перемещается вдоль оси X и длина тяги 11 постоянна. После того, как ось кривошипа 9 достигнет точки Г, начинает- 40 ся период выстаивания каретки 13 в переднем положении. В этот период времени ось кривошипа 9 перемещается по кривой II, близ кой к окружности определенного радиуса. В этом случае, если длина тяги 11 равна этому радиусу, а шарнир соединения тяги 11 с кареткой 13 расположен в центре этой окружности, за период движения кривошипа 9 по кривой II каретка 13 будет выстаивать.
H(q-p),
а длина тяги 11
RVp4(T
-q)
где R - радиус начальной окружности зуб- 45 чатого сектора 10;
40
р и q - коэффициенты, определяемые в зависимости от угла-в махс.поворота рычага 6 при выстаивании каретки 13.
В крайнем переднем положении ход каретки 13 ограничен упором 15, установленным на станине 2 автомата.
Привод работает следующим образом. Приводной вал 1 вращается вместе с кривошипом 3 в направлении стрелки. При этом точка А перемещается по окружности, но перемещения рычагов 5 шарнирного четырехзвенника и жестко связанного с ним рычага 6 относительно оси О незначительны. Ось 7, расположенная на конце рычага 6, и кривошип 9, расположенный в шестерне 8, в данный период движения лежат на одной прямой или в очень близком к ней положении, поэтому незначительное качание рычага 6 компенсируется движением обкатки шестерни 8 по зубчатому сектору 10. В результате этого кривошип 9 сохра- 0 няет свое положение, а каретка 13 выстаивает в заднем крайнем положении, выдерживая захваты на позиции штамповки.
При дальнейшем вращении приводного вала 1 от кривошипа 3 движение через ры- 5 чаг 4 передается рычагам 5 и 6, которые поворачиваются относительно шарнира О. При повороте рычага 6 шестерня 8, вращаясь на оси 7, обкатывается по зубчатому сектору 10. Поэтому кривошип 9 совершает сложное движение, которое складывается из перемещения оси 7 по окружности, радиус которой равен длине рычага 6, и вращательного движения кривошипа 9 относительно оси 7 при обкатывании шестерни 8 по зубчатому сектору 10. Если расстояние между осью 7 и
0
5 осью кривошипа 9 в три раза меньше дли- ны рычага 6 и ось кривошипа 9 находится
осью кривошипа 9 в три раза меньше дли- ны рычага 6 и ось кривошипа 9 находится
на начальной окружности шестерни 8, то кривошип 9 перемещается по алгебраической кривой, называемой астроидой.
В д анном случае астроида повернута на угол 45° относительно координатных осей. За период движения по траектории I между точками В и Г происходит перемещение кривошипа 9 в горизонтальном направлении, равное по величине ходу каретки 13 механизма переноса SK Это равенство
объясняется тем, что ординаты точек В и Г в принятой системе координат равны, а
объясняется тем, что ординаты точек В и Г в принятой системе координат равны, а
каретка 13 перемещается вдоль оси X и длина тяги 11 постоянна. После того, как ось кривошипа 9 достигнет точки Г, начинает- ся период выстаивания каретки 13 в переднем положении. В этот период времени ось кривошипа 9 перемещается по кривой II, близкой к окружности определенного радиуса. В этом случае, если длина тяги 11 равна этому радиусу, а шарнир соединения тяги 11 с кареткой 13 расположен в центре этой окружности, за период движения кривошипа 9 по кривой II каретка 13 будет выстаивать.
Для периода выстаивания каретки 13 нет необходимости использовать всю кривую И от точки Г до точки Д. Поскольку при обратном направлении, а каретка 13 при этом выстаивает, угол поворота оси 7 и рычагов 6 и 5 определяют по циклограмме работы каретки механизма переноса в системе механизмов автомата с учетом условий работы механизмов привода.
При крайнем переднем положении механизма каретка 13 выстаивает за время по
ворота рычага 6 на угол . При обратно.м движении механизма каретки 13 также выстаивает в крайнем переднем положении, пока рычаг 6 не повернется па угол, npi котором , т.е. пока рычаг 6 не придет в начальную точку траектории II выстаивания каретки. Далее каретка 13 перемешается в крайнее заднее положение.
Апализ циклограмм многопозиционных автоматов для объемной штамповки показывает, что самые длительные по углу пово- рота кривошипа главного вала периоды выстаивания кареток механизмов переноса могут быть обеспечепы при повороте рычага 6 до угла . Следовательно, для обеспечения лучшего выстаивания каретки 13 Б период поворота рычага 6 в диапазоне от в 0° до 65° необходимо выбрать координаты центра астроиды, т.е. смешение центра шарнира 12 соединения тяги 11 с кареткой 13 относительно центральной оси механизма и длину тяги 11, рав- ную условному радиусу кривизны астроиды, именно для этого диапазона углов.
Расчетно-экс и ер и ментальные значения указанных параметров практически для всех механизмов переноса сушествуюших авто- матов объемной штамповки, т.е. для диапазона углов поворота рычага 6 при выстаивании каретки 3 0 Эмаю: 65° следуюш.ие. Смешение центра шарнира 12 соединения
H (q-p),
длина тяги 11
RVp4(l-q) -,
радиус начальной окружности зуб чатого сектора 10; коэффициенты, определяемые в за висимости от угла бмакповорота ры чага при выстаивании каретки 13
Ч -
,,084-е«ах40,48+0,2849е«ак ;
8pSin 6MaK :-|-3sin 26MaKc 8(1-СОЗ- вмак)
Для известного механизма переноса размеры звеньев следующие, мм: радиус кривошипа 3 приводного вала 45; длина звена 4 205; длина рычага 5 55; длина рычага 6 48; радиус кривошипа 9 16; расстояние между осями О и Ок шарнирного четырехзвенника 200; радиус начальной окружности зубчатого сектора 1064. Угол между рычагами 5 и 6 . В этом случае смеш,ение центра шарнира 12 соединения тяги 11 с кареткой 13 относительно центральной оси механизма составляет ,19 мм; а длина тяги 1 46,39 мм.
Кривая 16 (фиг. 3) показывает основные периоды работы механизма переноса с указанными размера.ми. Преимущество предлагаемого привода механизма переноса по
15
1020
25
30
35
40
45
50
55
сравнению е известным состоит в улучшении по.чиц;1онирования на участке выстаи- каретки 13 в крайнем переднем положении. Кривая 17 11ок;1зы ает кинематические смещения отпооите.чьно крайнего ио. ю- жения каретки 13. Как вид.но, отклонение каретки 13 составляет около 0,1 мм, в то время как при использовании известного привода механизма переноса отклонения каретки механизма переноса от крайнего переднего положения (кривая 18) составляют более 0,6 мм. Такие отклонения должны быть компенсированы установкой упора 15 за счет упругих деформаций в механизме. В предлагаемом механизме упор 15 практически служит для облегчения наладки механизма.
Для проверки оптимальности выбора смешения центра шарнира соединения тяги 11 с кареткой 13 относительно центральной оси механизма Н и длины тяги 11 ,1 проведены расчеты положения каретки 13 относительно крайнего переднего положения при различных отклонения;, величин Н и 1 от расчетных. Для случая выполнения тяги каретки ,39 ,мм, а смещения от центральной оси мм, отклонения каретки от крайнего переднего положения в диапазоне рассматриваемых углов поворота кривошипа приводного вала 55-145° не могут быть представлены в одном масштабе с приведенными графиками, так как амплитуда отклонений составляет 7,436 мм. При той же длине тяги ,39 мм и при смещении центра шарнира 12 соединения тяги 11 с кареткой мм амплитуда отклонений каретки от крайнего переднего положения в диапазоне тех же углов поворота кривошипа приводного вала составляет 3,558 мм. При сохранении оптимального отклонения смещения центра шарнира соединения тяги 11 с кареткой относительно оси механизма ,19мм и при уменьшении длины тяги 11, например, до ,0 мм амплитуда отклонений каретки 13 от крайнего переднего положения в диапазоне углов поворота кривошипа приводного вала 55-145° составляет 3,676 мм, а при увеличении длины тяги 11 до 1 56,0 мм амплитуда указанных отклонений составляет 1,726 мм. При одновременном увеличении длина тяги 11 ,0 мм и смещения центра шарнира соединения тяги 11 с кареткой Н 25 мм амплитуда отклонений составляет для тех же условий 4,26 мм.
Приведенные значения амплитуды отклонений положения каретки от крайнего переднего в заданном диапазоне уг/юв поворота кривошипа приводного вала, полученные для значений 1 и Н, отличающихся от оптимальной пары их значений, рассчитанных по указанным зависимостям, иллюстрируют скачкообразное увеличение амплитуды отклонений (не менее, чем на порядок).
Таким образом, предлагаемый привод позволяет получить требуемую циклограмму работы каретки механизма переноса и заменить кулачковые механизмы в приводе на ;(;и1К11утые кинематические механизмы, обеспечивающие нроцесс выстаивания с высокой точностью позиционирования каретки. При этом исключаются биекия в системе механизма переноса, вибрации и связанные с ними высокие динамические нагрузки, которые приводят к потере заготовок при переносе их с одной нозиции на другую. Использование предлагаемого привода снижает динамические нагрузки и позво;1яет увеличить быстроходность многопозиционных автоматов, а следовательно, их производи гельность.
Формула изобретения
Привод механизма переноса для многопозиционных штамповочных автоматов по авт. св. № 1237293, отличающийся тем. что, с целью гювьицения точности позиционирования и снижения динамических нагругде R
зок, центр шарнира соединения тяги с кареткой смещен относительно центральной оси .механизма на величину
(q-p), а длина тяги равна
1- (l-q),
)адиус нача/1ьнои окружности зубчатого сектора;
ко::)ффицие1 ты. определяемые из зависимостей
Г()ма„, 2,084-G«,Kc (0,48-fO,28496««:);
8 р51п ОмаксЧ-Зят 20макс
8{1-COS- GV.
где ()M;IKC - угол поворота рычага при выстаивании каретки.
//
10
15
16
вперед
87
дыстаибание ffopemnu д зодне/ no/ioweHULf
дыстоа ание но/}ет/{и - б wen с/а
20
25 Фаг.З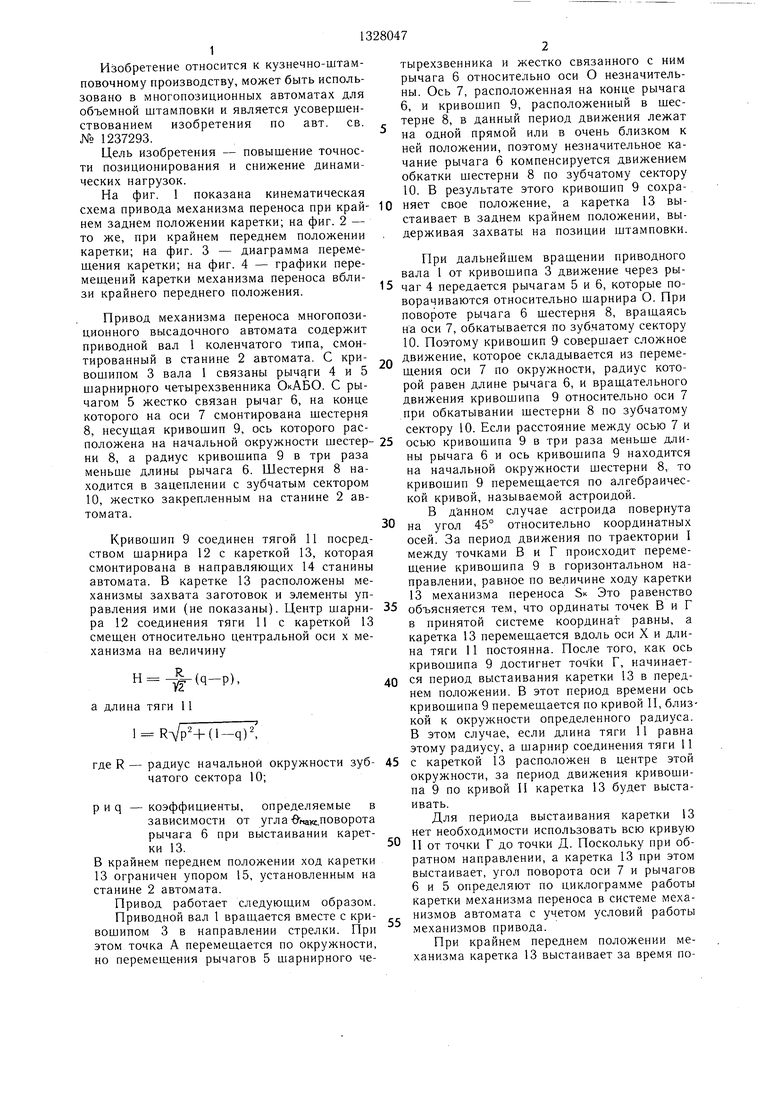
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный автомат для холодной объемной штамповки изделий | 1986 |
|
SU1424930A1 |
| Механизм переноса для многопозиционных штамповочных автоматов | 1983 |
|
SU1237293A1 |
| Преобразователь равномерного вращения в неравномерное | 1984 |
|
SU1186297A1 |
| Привод механизма переноса холодновысадочного многопозиционного автомата | 1979 |
|
SU867505A1 |
| Привод механизма с длительным выстоем выходного звена | 1988 |
|
SU1593772A1 |
| Устройство для перемещения заготовок | 1984 |
|
SU1205973A1 |
| Кривошипно-шатунный механизм | 1977 |
|
SU685867A1 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
| Устройство для отделения от стопы плоской заготовки и подачи ее в пресс | 1984 |
|
SU1319980A1 |
| Устройство для вырубки заготовок из плоского материала | 1983 |
|
SU1107933A1 |
Изобретение относится к кузнечно- штамповочному -производству и может быть использовано в многопозиционных автоматах для объемной штамповки. Целью изобретения является повышение точности позиционирования и снижение динамических нагрузок. Указанная цель достигается тем, что в приводе механизма переноса для многопозиционных штамповочных автоматов, содержа- ш,ем приводной шарнирный четырехзвенник с рычагом 6 на ведомом звене и смонтированной на конце рычага шестерней 8 с кривошипом 9 на ее начальной окружности, зубчатый сектор 10, закрепленный на станине 2 и связанный зацеплением с шестерней 8, а также тягу соединения кривошипа 9 с кареткой 13 посредством шарнира 12 с радиусом начальной окружности, в три раза меньшим длины рычага 6, центр шарнира 12 соединения тяги 11 с кареткой 13 смешен относительно центральной оси меха низма на величину (q-р), а длина тяги 11 l RVi#4-(l-q) , где R - радиус начальной окружности зубчатого сектора, а коэффициенты р и q определяются в зависимости от угла вмакс поворота рычага 6 при выстаивании каретки 13. р 9макс 2,084-вмакс (0,48+ +0,28490макс) q 8psin eMaKc+3sin 20MaKc/ /8(1-соз ЭмЬкс). При вращении коленчатого вала 1 за время поворота рычага 6 от угла до 9макс 65° происходит выстаивание каретки 13 в крайнем переднем положении с минимальными отклонениями. 4 ил. (Л 00 1чЭ 00 о N к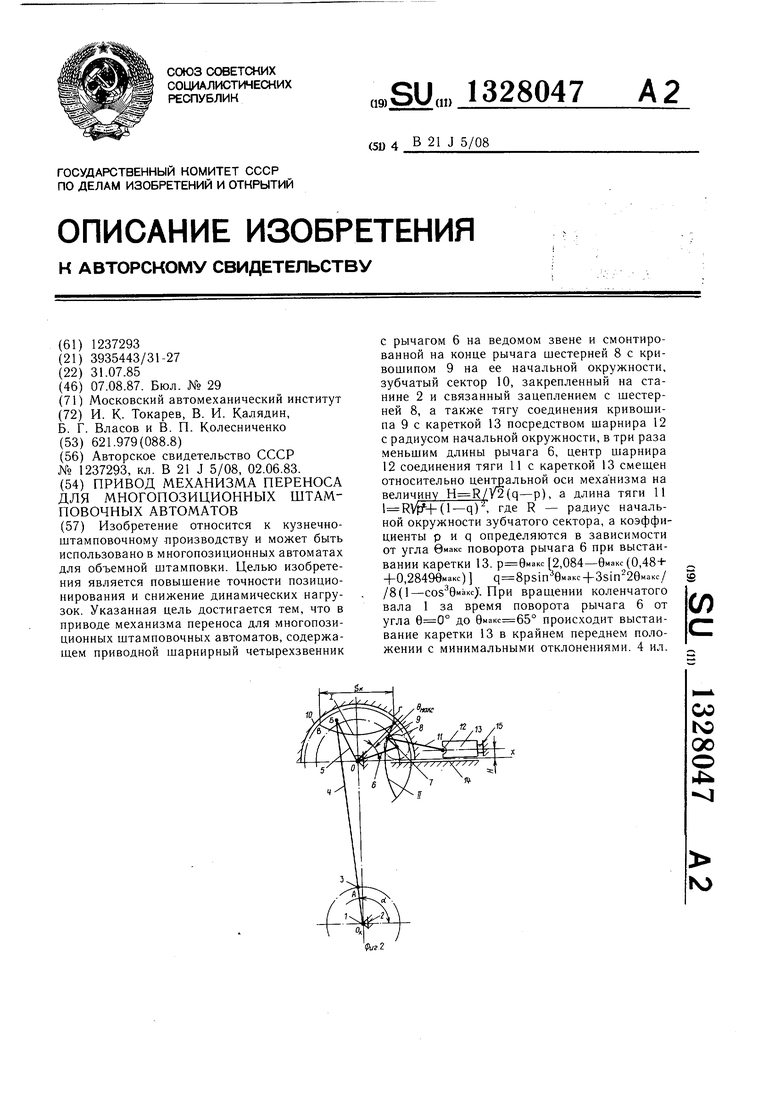
и мм
Редактор И. Николайчук Заказ 3429/12
ВНИИПИ Государственного комитета СССР по делам нзобретений н открытий
113035, Москва, Ж-35, Раушская иаб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель Н. Тимофеева
Техред И. ВересКорректор С. Черни
Тираж 582Подписное
| Механизм переноса для многопозиционных штамповочных автоматов | 1983 |
|
SU1237293A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
