Изобретение относится к системам управления бобинорезательными станками для разрезания и перемотки ленточных материалов.
Целью изобретения является повышение качества управления перемотки материала.
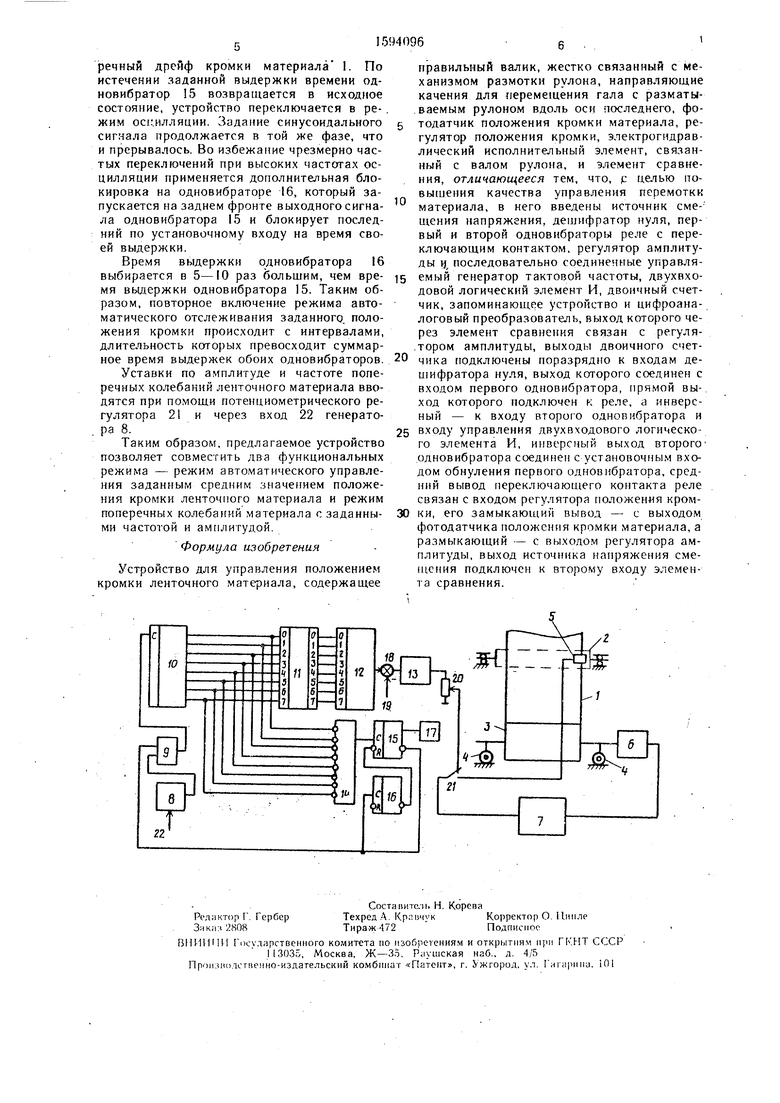
На чертеже приведена функциональная схема устройства.
Ленточный материал 1 в тракте размоточного механизма направляется правильным валиком 2 при перемотке рулона 3, вал которого имеет возможность перемешаться в направлении, поперечном движению материала 1, по направляющим 4 качения. Фотодатчик 5 положения кромки материала и электрогидравлический исполнительный элемент 6 связаны с регулятором 7 положения кромки. В схему также входят соединенные последовательно управляемый генератор 8 тактовой частоты,.двух- входовой логический элемент И 9, двоичный счетчик 10, запоминающее устройство 1 1 и цифроаналоговый преобразоватеть 12 с усилителем 13. Выходы двоичного счетчика 10 поразрядно подключены к входа.м дешифратора 14 нуля, выполненного на вось- мивходовом элементе И, выход которого соединен с входом первого одновибратора 15, инверсный выход которого подключен к входу второго одновибратора 16 и входу двухвхо - дового элемента И 9, а прямой - к обмотке реле 17. Инверсный выход второго одновибратора 16 соединен с установочным входом обнуления первого одновибратора 15. Между выходом цифроаналогового преобразователя 12 и входом усилителя 13 подключен элемент 18 сравнения, второй вход которого соединен с источником 19 смешения напряжения (не показан). Выход усилителя 13 через потенциометрический регулятор 20 амплитуды связан с переключающим контактом 21 реле 17.
жгu
Средний вывод контакта 21 связан с входом регулятора 7, размыкающий вывод - с выходом регулятора 20, замыкающий - с выходом фотодатчнка 5. Вход 22 генератора 8 является входом управления частотой этого генератора.
Устройство работает следующим образом.
При включенном реле47 его замыкающий контакт замкнут, вход регулятора 7 присоединен к выходу фотодатчика 5. Регулятор 7 работает в режиме стабилизации положения кромки перематываемого ленточного материала 1, соответствующего месту первоначальной установки фотодатчика 5 относительно торцов правильного валика 2.
точенном р1еле 17 выходной сигнал с регулятора 20 через размыкающий контакт реле поступает на вход регулятора 7. Ре- гулятор 7 и электрогидравлический испол- 5 нительный элемент 6, связанный с валом рулона 3, представляет собой разомкнутую систему.программного управления. При этом исполнительный элемент вызывает поперечные перемещения оси рулона 3 в соответствии с заданной синусоидальной функцией и коэффициентом передачи разомкнутой системы.
Следует отметить, что электрогидравлический исполнительный элемент б является элементом интегрирующего типа. Последнее
10
При отклонении кромки ленты гифаво или 5 приводит к необходимости учитывать фазо- влево от этого положения на выходе фото-вый сдвиг между перемещением оси руло- на и заданной функцией, равной 90°.
Применение режима осцилляции не снимает вопроса о стабилизации среднего зна. датчика 5 формируется сигнал, по амплитуде и знаку соответствующий величине и знаку отклонения, что обеспечивает системе регулирования отслеживание кромкой ленты заданного положения. В качестве исполнительного органа, жестко связанного с осью вала разматываемого рулона, служит электрогидравлический исполнительный элемент 6.
Для обеспечения режима поперечных колебаний- (режима осцилляции) используется цифроаналоговый задатчик низкочастотных сигналов, выход которого подключается к входу регулятора 7 через размыкающий контакт реле 17.
20
25
чения положения кромки материала. Для совмен1ения обоих режимов в схеме устройства предусмотрена блокировка на базе дещифратора 4 нуля, одновибраторов 15 и 16 и реле 17 с переключающим контактом 21.
Назначение указанных блоков заключается в том, чтобы в те моменты, когда совершающая поперечное движение KpoMj a перематываемого материала проходит нейтральное (или близкое к нейтральному) положение, переключиться на управление от
Формировар1ие синусоидального сигнала, 30 фотодатчика 5 на ограниченное время, а производится дискретно в форме двоично-затем вернуться |К режиму осц илляции, сого кода на выходах запоминающего уст-хранив ту же фазу колебаний, что и при
отключении. .
Реализация описанного режима производится следующим образом. Верхний предел
В качестве информации, записанной в за- 35 частоты задаваемых поперечных колебаний поминающем устройстве 1 и содержащей,должен лежать в пределах полосы прок примеру, 256 8-разрядных двоичных слов, пускания разомкнутой системы управления с
гидроцилиндром. В этом случае момент пере- хола кромкой материала, с учетом выщеройства i1 при поступлении на его адресные входы кода текущего времени с выхода двоич}юго счетчика 10.
используется синусоидальная функция, так что каждому из 256 значений 8-разрядного кода текущего времени соответствует названного фазового сдвига, соответствует
„. ...., ,,„,.,-,г.г л1ж111Гл/- Г1ГТглгт1. гЬ| и If II Л 1Л ЭЯГТЯ 8-разрядног значение кода значения .функции. Код текуидего времени формируется на выходах двоичного счетчика 10 при непрерывном заполнении его тактовой частотой генератора 8, поступающей через логический элемент И 9. Дискретность установки значений кода текущего времени - период частоты генератора 8.
Значение кода синусоидальной функции с помощью цифроапалогового преобразователя 12 преобразуется в аналоговый сиг- нал, который усиливается по мощности усилителем 13. На выходе усилителя 13 подключен потенциометрический регулятор 20 амплитуды (уровня выходного сигнала за- датчика).
Напряжение смещения от источника 19, поданное на второй вход элемента 18 сравнения, смещает выходной сигнал так, что на выходе усилителя 13 формируется дву- полярный синусоидальный сигнал. При обесмаксимуму синусоидальной функции задания, г. с. значению кода текупхего времени, соответствующего, например, текущему значению фазы развертки функции, равному 270°, т. е. в 8-разрядном двоичном ко45 де 11000000. Как видно из чертежа, именно при этом значении кода текущего времени на выходе дешифратора 14 формируется сигнал совпадения, запускающий од- новибратор 15. Последний сигналом cocBoej го инверсного выхода блокирует логический
50 элемент И 9 и счетный вход двоичного счетчика 10, тем са.мым останавливая развертку синусоидальной функции на время выдержки одновибратора 15. После запус- - ка одновибратора 5 включается реле 17 и к входу регулятора 7 подключается фото55 датчик 5.
Устройство работает R режиме автоматического управления положением кромки и корректирует возможный медленный попеточенном р1еле 17 выходной сигнал с регулятора 20 через размыкающий контакт реле поступает на вход регулятора 7. Ре- гулятор 7 и электрогидравлический испол- нительный элемент 6, связанный с валом рулона 3, представляет собой разомкнутую систему.программного управления. При этом исполнительный элемент вызывает поперечные перемещения оси рулона 3 в соответствии с заданной синусоидальной функцией и коэффициентом передачи разомкнутой системы.
Следует отметить, что электрогидравлический исполнительный элемент б является элементом интегрирующего типа. Последнее
приводит к необходимости учитывать фазо- вый сдвиг между перемещением оси руло названного фазового сдвига, соответствует
..., ,,„,.,-,г.г л1ж111Гл/- Г1ГТглгт1. гЬ| и If II Л 1Л ЭЯГТЯмаксимуму синусоидальной функции задания, г. с. значению кода текупхего времени, соответствующего, например, текущему значению фазы развертки функции, равному 270°, т. е. в 8-разрядном двоичном ко5 де 11000000. Как видно из чертежа, именно при этом значении кода текущего времени на выходе дешифратора 14 формируется сигнал совпадения, запускающий од- новибратор 15. Последний сигналом cocBoej го инверсного выхода блокирует логический
0 элемент И 9 и счетный вход двоичного счетчика 10, тем са.мым останавливая развертку синусоидальной функции на время выдержки одновибратора 15. После запус- - ка одновибратора 5 включается реле 17 и к входу регулятора 7 подключается фото5 датчик 5.
Устройство работает R режиме автоматического управления положением кромки и корректирует возможный медленный попелический исполнительный элемент, связанный с валом рулона, и элемент сравнения, отличающееся тем, что, целью повышения качества управления перемотки
речный дрейф кромки материала I. По правильный валик, жестко связанный с ме- истечении заданной выдержки времени од- ханизмом размотки рулона, направляющие новибратор 15 возвращается в исходное качения для перемещения гала с разматы- состояние, устройство переключается в ре-. .ваемым рулоном вдоль оси последнего, фо- жим осп.илляции. Задание синусоидального g тодатчик положения кромки материала, ре- сигнала продолжается в той же фазе, что гулятор положения кромки, электрогидрав- и прерывалось. Во избежание чрезмерно частых переключений при высоких частотах осцилляции применяется дополнительная блокировка на одновибраторе 16, который за-„ .., , ,
пускается на заднем фронте выходного сигна- материала, в него введены источник смела одновибратора 15 и блокирует послед-щения напряжения, дешифратор нуля, пер- ний по установочному входу на время сво- вый и второй одновибраторы реле с пере- ей выдержки.ключающим контактом, регулятор амплиту- Время выдержки одновибратора 16 ды ц последовательно соединенные управля- выбкрается в 5-10 раз больщим, чем вре- 5 емый генератор тактовой частоты, двухвхо- мя выдержки одновибратора 15. Таким об- довой логический э.пемент И, двоичный счет- разом, повторное включение режима авто- чик, запоминающее устройство и цифроана- матического отслеживания заданного, поло- логовый преобразователь, выход которого че- жения кромки происходит с интервалами, рез элемент сравнения связан с регуля- длительность которых превосходит суммар- .тором амплитуды, выходы двоичного счетное время выдержек обоих одновибраторов. 20 цнка подключены поразрядно к входам де- Уставки по амплитуде и частоте попе- шифратора нуля, выход которого соединен с
входом первого одновибратора, прямой выход которого подключен к реле, з инверсный - к входу второго одновибратора и 25 входу управления двухвходового логического элемента И, инверсный выход второго одновибратора соединен с установочным входом обнуления первого одновнбратора, средний вывод переключающего контакта реле связан с входом регулятора положения кром- поперечных колебаний материала с заданны- 30 ки, его замыкающий вывод - с выходом ми частотой и амплитудой.фотодатчика положения кромки материала, а
Формула изобретения-размыкающий - с выходом регулятора амречных колебаний ленточного материала вводятся при помощи потенциометрического регулятора 21 и через вход 22 генератора 8.
Таким образом, предлагаемое устройство позволяет совместить два функциональных режима - режим автоматического управления заданным средним значением положения кромки ленточного материала и режим
плитуды, выход источника напряжения смещения подключен к второму входу элемента сравнения.
Устройство для управления положением кромки ленточного материала, содержащее
лический исполнительный элемент, связанный с валом рулона, и элемент сравнения, отличающееся тем, что, целью повышения качества управления перемотки
правильный валик, жестко связанный с ме- ханизмом размотки рулона, направляющие качения для перемещения гала с разматы- ваемым рулоном вдоль оси последнего, фо- тодатчик положения кромки материала, ре- гулятор положения кромки, электрогидрав- .., , ,
материала, в него введены источник смещения напряжения, дешифратор нуля, пер- вый и второй одновибраторы реле с пере- ключающим контактом, регулятор амплиту- ды ц последовательно соединенные управля- емый генератор тактовой частоты, двухвхо- довой логический э.пемент И, двоичный счет- чик, запоминающее устройство и цифроана- логовый преобразователь, выход которого че- рез элемент сравнения связан с регуля- тором амплитуды, выходы двоичного счетцнка подключены поразрядно к входам де- шифратора нуля, выход которого соединен с
размыкающий - с выходом регулятора амплитуды, выход источника напряжения смещения подключен к второму входу элемента сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| Генератор спектрометрических импульсов | 1986 |
|
SU1325671A1 |
| Программное реле времени | 1988 |
|
SU1653020A1 |
| Манипулятор и способ управления им | 1990 |
|
SU1782720A1 |
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| Частотно-регулируемый электропривод | 1987 |
|
SU1434530A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Регулятор постоянного тока для измерения тока срабатывания защиты стабилизаторов напряжения | 1982 |
|
SU1051522A1 |
| ИМИТАТОР РЕАЛИЗАЦИИ СЛУЧАЙНЫХ ИЗМЕНЕНИЙ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 1995 |
|
RU2099863C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ АККОМОДАЦИИ ГЛАЗА | 1989 |
|
RU2057500C1 |
Изобретение относится к системам управления бобинорезательными станками для разрезания и перемотки ленточных материалов. Целью изобретения является повышение качества управления перемотки материала. Эта цель достигается за счет введения источника смещения напряжения дешифратора нуля, первого и второго одновибратора, реле с переключающим контактом, регулятора амплитуды и последовательно соединенных управляемого генератора тактовой частоты, двухвходового логического элемента И, запоминающего устройства и цифроаналогового преобразователя. Изобретение позволяет наряду с отслеживанием заданного среднего значения положения кромки улучшить качество перемотки материала благодаря периодическим поперечным колебаниям движущегося материала в результате введения в схему устройства специального задатчика синусоидальных колебаний с управляемой амплитудой и частотой элементов блокировки и связей. Это позволяет посредством автоматического переключения сочетать оба режима в одном устройстве. 1 ил.
| Автоматическая кромкоправка | 1985 |
|
SU1326523A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
