00
со
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ И РАЗНОСТИ ЧАСТОТ СИГНАЛОВ | 1992 |
|
RU2025738C1 |
| Способ измерения фазового сдвига между двумя гармоническими сигналами и устройство для его осуществления | 1988 |
|
SU1596272A1 |
| ПРИЕМОПЕРЕДАЮЩАЯ АППАРАТУРА ШИРОКОПОЛОСНЫХ ПСЕВДОСЛУЧАЙНЫХ СИГНАЛОВ | 1979 |
|
SU1840119A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ АНАЛОГОВЫХ СИГНАЛОВ В ИМПУЛЬСНУЮ ПОСЛЕДОВАТЕЛЬНОСТЬ, МОДУЛИРОВАННУЮ ПО ВРЕМЕНИ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2476988C1 |
| Цифровой измеритель длительности периода | 1988 |
|
SU1582176A1 |
| Цифровой регулятор | 1978 |
|
SU911458A1 |
| Преобразователь частоты в код | 1989 |
|
SU1620954A1 |
| Способ измерения частоты следования импульсов за фиксированный интеграл времени | 1983 |
|
SU1239618A1 |
| Генератор случайного процесса | 1982 |
|
SU1073774A1 |
Изобретение относится к измерительной технике. Целью является повышение точности измерения. Цель достигается тем, что сдвиг интервалов времени заданной длительности задают равным периоду следования импульсов измеряемой частоты, в течение каждого интервала времени заданной длительности формируют в виде цифрового кода значение весовой функции, симметричной относительно середины интервалов времени заданной длительности, значения кодовых последовательностей получают путем суммирования кодов текущих значений весовой функции каждого сдвинутого интервала времени заданной длительности по импульсам тактовой частоты, суммирование полученных кодовых последовательностей осуществляют в течение фиксированного интервала времени измерения по импульсам тактовой частоты, а полученную сумму регистрируют как результат измерения. Способ осуществляется также путем формирования *98N интервалов времени заданной длительности, сдвинутых относительно друг друга, формирования фиксированного интервала времени измерения и суммирования значений кодовых последовательностей в течение фиксированного интервала времени измерения. 3 ил.
Изобретение относится к измерительной технике и может быть использовано при измерении частоты следования импульсов.
Целью изобретения является повышение точности измерения.
Сущность способа заключается в измерении частоты следования импульсов путем формирования п временных интервалов заданной длительности.
сдвинутых относительно друг друга, формировании им}1ульсов опорной частоты, формирования фиксированного нн- . тервала времени измерения и сумми- .рования значения кодовых последовательностей в течение фиксированного интервала времени измерения, а сдвиг интервалов времени заданной длительности выбирается равным периоду следования импульсов измеряемой частоты, причем в течение каждого интервала времени заданной длительности формируют в виде цифрового кода значение весовой функции, симметричной относительно середины интервалов времени заданной длительности, а значения кодовых последовательностей получают путем суммирования текущих ;значений кодов весовой функции,причем суммирование значений кодовых последовательностей в течение фиксированного интервала времени измерения осуществляют по импульсам тактовой частоты, из полученной суммы оттреде- ляют результат измерения частоты следования импульсов.
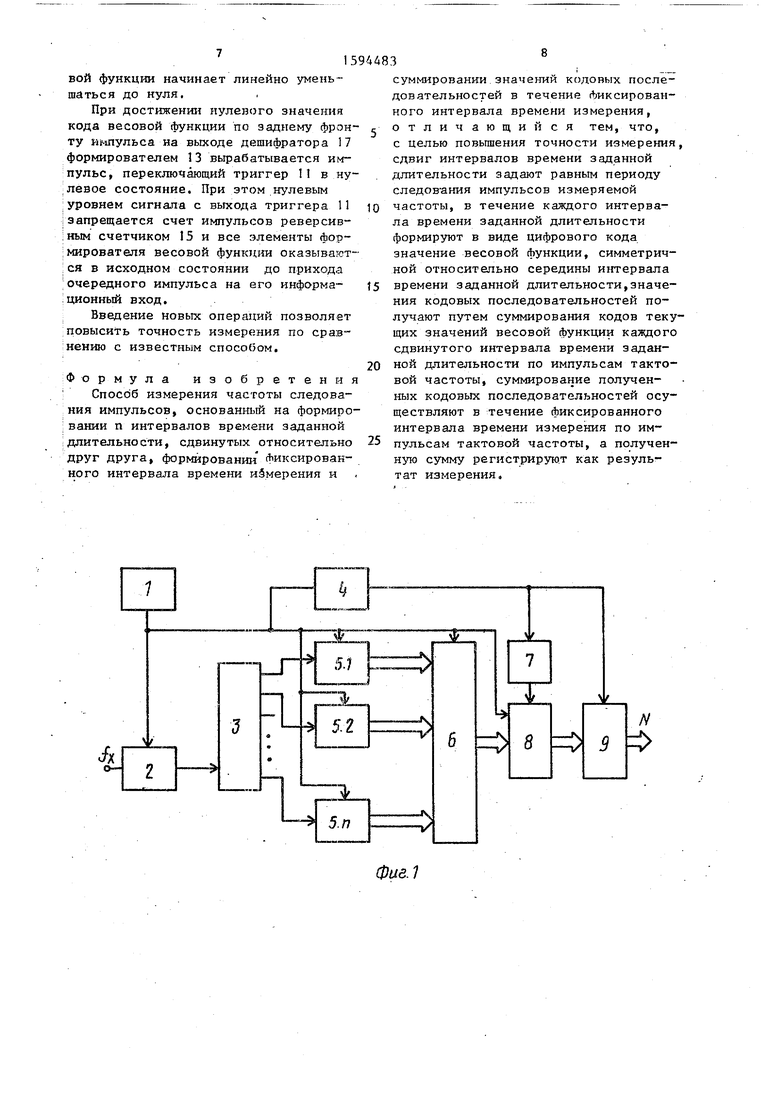
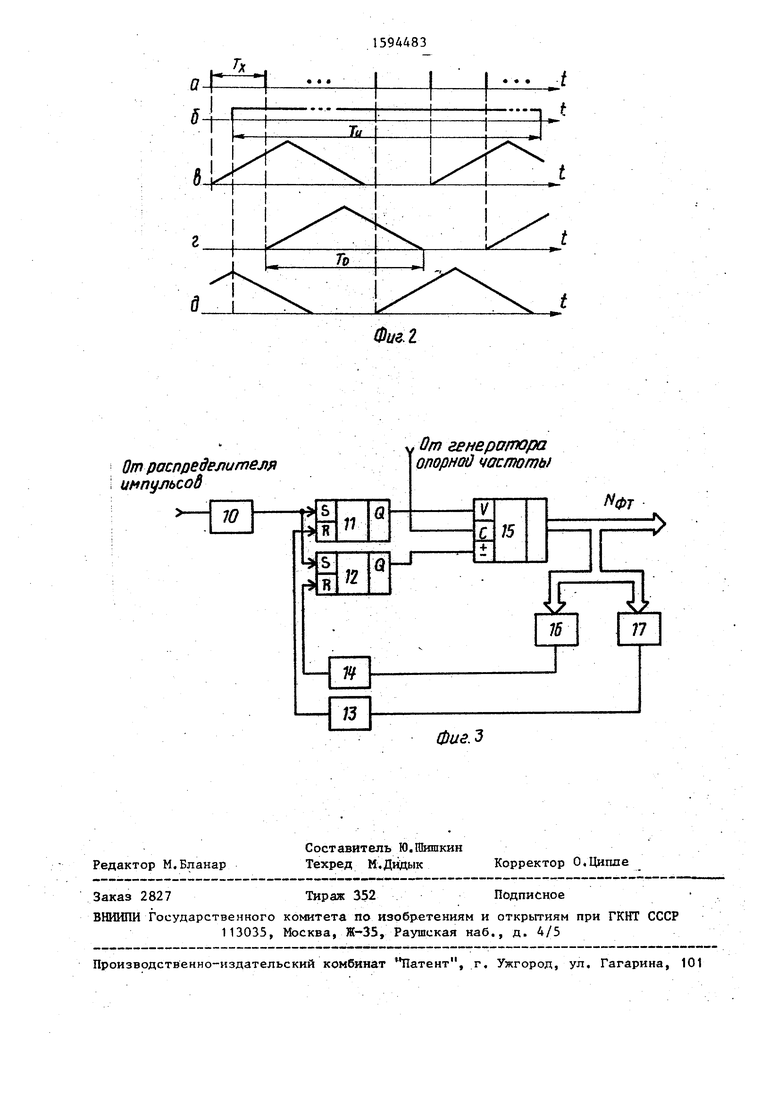
На фиг.1 представлена структурная схема преобразователя частоты в код для реализации способа; на фиг. 2 -- :временная диаграмма реализации спо- :соба; на фиг. 3 - схема формирователя весовой функции.
Способ можно реализовать с использованием весовой функции треугольной формы, симметричн ой относительно середины временного интервала (фиг. 2)
В моменты поступления импульсов измеряемой частоты f , (фиг ,2а) начинают формировать одинаковые весе- вые функции (фиг.2 в,г,д) в виде цифровых кодов, значения которых отличны от нуля в .течение заданного интервала времени и симметричны относительно его середины.
Весовые функции длительностью Т формируются параллельноJ по поступившим импульсам измеряемой часто- гы формируются весомые функции (фиг.2в, г.д). Следукнций (п+1)-и импульс из- меряемой частоты совпадает с началам соответствующей весовой функции в течение измеряемого временного интервала Т, (фиг. 26) непрерывно повторяется.
В течение фиксированного интервала времени измерения Т, вырабатывается кодовая последовательность, представляющая собой сумму текущих значений весовых функи1ий.в соответ- Ътвующие моменты времени.
Значения кодовых последовательностей суммируются в моменты поступления импульсов опорной частоты ,„ причем И Накопленная за ин- тервал Т сумма значений кодовых последовательностей представляет Собой сумму значений всех весовых функций в дискретные моменты времени, определяемые поступлением импульсов опорной частоты, и равна произведению значения постоянной составляющей суммы весовых функций и числа импульсов опорной частоты,поступивших за время Т,
-М
К . f.
on
И
(О
где
К - коэффициент размерности, равный амплитудному значению весовой функции;
АО
а X
Т,
постоянная составляющая суммы весовых функций; а - коэффициент, зависящий
от формы весовой функции, который для весовой функции, имеющей форму треугольника, равен 1/2; Тр - длительность весовой
функции;
Т - период следования импульсов измеряемой частоты, Измеряемая частота импульсов опрееляется из зависимости (I):
NTffrt кТаТ-f
о-Т,
(2)
Преобразователь частоты в код содержит генератор 1 опорной частоты D-триггер 2 с динамическим управлением, распределитель 3 и myльcoв, делитель 4 частоты, формирователи 5.1-5.П весовой функции, сумматор 6, элемент 7 задержки, накапливающий сумматор 8, регистр 9. Выход генератора 1 опорной частоты через делитель 4 частоты соединен с такто- вым входом регистра 9 и входом зле- мента 7 задержки и напрямую с тактовыми входами D-триггера 2, формирователей 5.1-5.П весовой функции, сумматора 6 и накапливающего сумматора 8.
Входная шина преобразователя соединена с D-входом .триггера 2, выход которого подключен к информационному входу распределителя 3 импульсов выходы которого с 1 по п соединены с информационными входами формирователей 5.1-5,11 весовой функции соответственно.
Информациэнные выходы формирователей весовой функции соединены с информавдонными входами сумматора 6
информационный выход которого подключен к информационному входу накапливающего сумматора 8, вход опроса которого соединен с выходом элемент 7 задержки, а информационный выход подключен к информационному входу регистра 9, информацшнный выход которого является выходом поеобоазояя- теля.
Формирователь весовой функции (фиг.З) содержит формирователь 10 импульсов, триггеры II и 12, формирователи 13 и 14 импульсов,реверсивный счетчик 15, дешифраторы 16 и 17. Информационный вход формирователя 5 соединен через формирователь 10 с S-входами триггеров 11 и 12, R-входы которых через формирователи 13 и 14 подключены к выходам дешифраторов 17 и 16 соответственно,информационные входы которых соединены с информационным выходом форми- рователя весовой функции и подключены к выходам реверсивного счетчика 15, управляющий вход которого соединен с выходом триггера 11, вход выбора режима подключен к выходу триггера 12, а счетный вход соединен с тактовым входом формирователя ве- совой функции.
Преобразователь частоты в код работает следующим образом.
Импульс измеряемой частоты,длительность которого t больше периода следования импульсов опорной частоты, поступает на D-вход триггера 2 и синхронизируется импульсами опорной частоты, переписываясь на выход D-триггера 2 в момент их поступления. Далее импульсы частоты fy поступают на вход распределителя 3 импульсов, на выходах, с 1-го по п-й которого формируются выходные импульсы, обеспечивающие поочередный запуск формирователей 5.1-5.П весовой функции (фиг,2 в,г,д). На выходах формирователей весовой функции синхронно с импульсами опорной частоты формируются коды текущих значений весовых функций,Формирование кодовой последовательности осуществляется путем непрерывного суммирования текущих значений весовых функций в п каналах сумматором 6,
В течение интервала времени измерения Т (фиг, 26) по импульсам опорной частоты накапливающим сумматором
0
5
0
5
0
5
0
5
В ос чцествляется суммирование-значений кодовой последовательности,
Депитель 4 частоты, формирующий интервал времени измерения Т вырабатывает импульс переполнения в момент окончания интервала измерения,по которому осуществляется перезапись cфop п poвaннoгo в накапливающем сумматоре 8 кода результата измерения, , в выходной регистр 9,
Импульсом конца интервала измерения, задержанным в элементе 7 задержки, осуществляется обнуление накапливающего сумматора 8, подготавливая его к циклу измерения,
Фop QIpoвaтeль 5 весовой функции (фиг,3) работает следующем образом.
В исходном состоянии триггеры I и 12 находятся в нулевом состоянии. При поступлении на информационный вход формирователя весовой функции импульса частотой f,./i с соответствующего выхода распределителя 3 импульсов формирователе м 10 формируется выходной импульс, переключающий триггеры 11 и 12 в единичное состояние.
При этом сигналом с выхода триггера 11, поступающим на управляющий V-вход реверсивного счетчика 15, последний переводится в режим счета импульсов, поступающих на его вход с выхода генератора 1 опорной частоты, Сигналом с выхода триггера 12,поступающим на вход выбора режима,реверсивный счетчик 15 переводится в режим суммирования импульсов.
В процессе счета на информационных выходах реверсивного счетчика 15 по импульсам опорной частоты формируется последовательность кодов весовой функции, числовые эквиваленты которых для весовой функции треугольной формы линейно возрастают во времени.
При достижении кодом значения, соответствующего середине весовой функции, на выходе дешифратора 16 формируется передний фронт импульса, по которому формирователем 14 вырабатывается импульс, переключающий триггер 12 Б нулевое состояние.
При изменении -логического уровня на выходе триггера 12 реверсивный счетчик 15 переключается.в режим вычитания. При этом значение кода весевой функции начинает линейно уменьшаться до нуля.
При достижении иулеззого значения кода весовой функции по заднему фронту импульса на выходе дешифратора 17 формирователем 13 вьфабатывается импульс, переключающий триггер II в ну- ;левое состояние. При этом нулевым :уровнем сигнала с выхода триггера 11 iзапрещается счет импульсов реверсив- :ным счетчиком 15 и все элементы фор- ;мирователя весовой функции оказыванзт- ;ся в исходном СОСТОЯНИИ до прихода очередного импульса на его информа- ционный вход.
Введение новых операций позволяет повысить точность измерения по сравнению с известным способом.
Формула изобретения Способ измерения частоты следования импульсов, основанный на формиро- :вании п интервалов времени заданной ;длительности, сдвинутых относительно друг друга, формировании фиксированного интервала времени и5мерения и ,
суммировании значений кодовых последовательностей в течение Ликсирован- ного интервала времени измерения, отличающийся тем, что, с целью повьппения точности измерения, сдвиг интервалов времени заданной длительности задают равным периоду следования импульсов измеряемой частоты, в течение каждого интервала времени заданной длительности формируют в виде цифрового кода значение весовой функции, симметричной относительно середины интервала времени заданной длительности,значения кодовых последовательностей получают путем суммирования кодов текущих значений весовой функции казвдого сдвинутого интервала времени заданной длительности по импульсам тактовой частоты, суммирование полученных кодовых последовательностей осуществляют в течение фиксированного интервала времени измерения по импульсам тактовой частоты, а полученную сумму регистрируют как результат измерения.
фиг.1
От распределителя инпульсод
Фие.г
V От генератора опорной частоты
фиг.Ъ
| Шляндин В.М | |||
| Цифровые измерительные устройства | |||
| - М.: Высшая школа, 1981, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
| Способ изготовления пружин из кремнистых бронз | 1937 |
|
SU53643A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
