Изобретение относится к автоматическому управлению, в частности, к специализированным управлякящм устройствам, и может быть использовано в системах программного управления радиотелескопами.
При программном управлении антен- HbiMH устройствами возникает задача вьгаода антенны в исходную (первую программную) точку из произвольного положения с учетом рабочей зоны . и направления дальнейшего ее движения по программе. Рабочая зона определяется максимальным углом поворота антенны от ее нулевого положения в положительном или отрицательном направлении.
Цель изобретения - повьшение надежности устройства путем автоматического контроля и, торможения при подходе к границам рабочей зоны и повьшение его быстродействия.
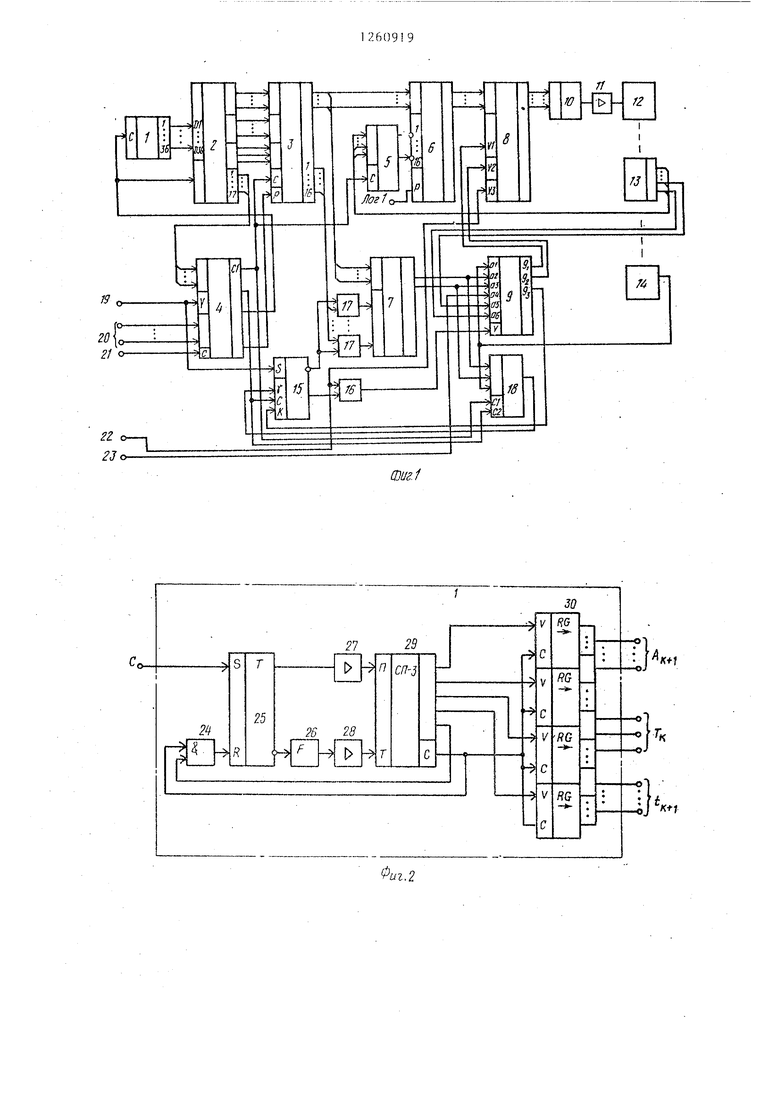
На фиг.1 представлена структурна схема устройства; на фиг,2 1 - принципиальные схемы блоков устройства; на фиг.8 - рабочая зона привода; на фиг.9 - временные диаграммы работы устройства.
Устройство для программного управления электроприводом содержит блок 1 ввода, блок 2 памяти, интерполятор 3, блок 4 управления, регистр 5 действительного угла, первый 6 и второй 7 сумматоры, кодовый преобразователь 8, блок 9 постоянно памяти,цифроаналоговый преобразователь 10,усилитель 11 мощности,привод 12,механически соединенный с дачиком 13 обратной связи и датчивюм 14 знака угла поворота,триггер 15, элемент И 16,группа 17 элементов И, блок is контроля, вход 19 сброса, входы 20 установки кода времени, синхронизирующий вход 21, пусковой вход 22 и управляющий вход 23.
Блок 1 ввода (фиг.2) выполнен на элементе И 24, триггере 25, формирователе 26, усилителях 27 и 28, считывателе 29 с перфоленты и сдвиговых регистрах 30.
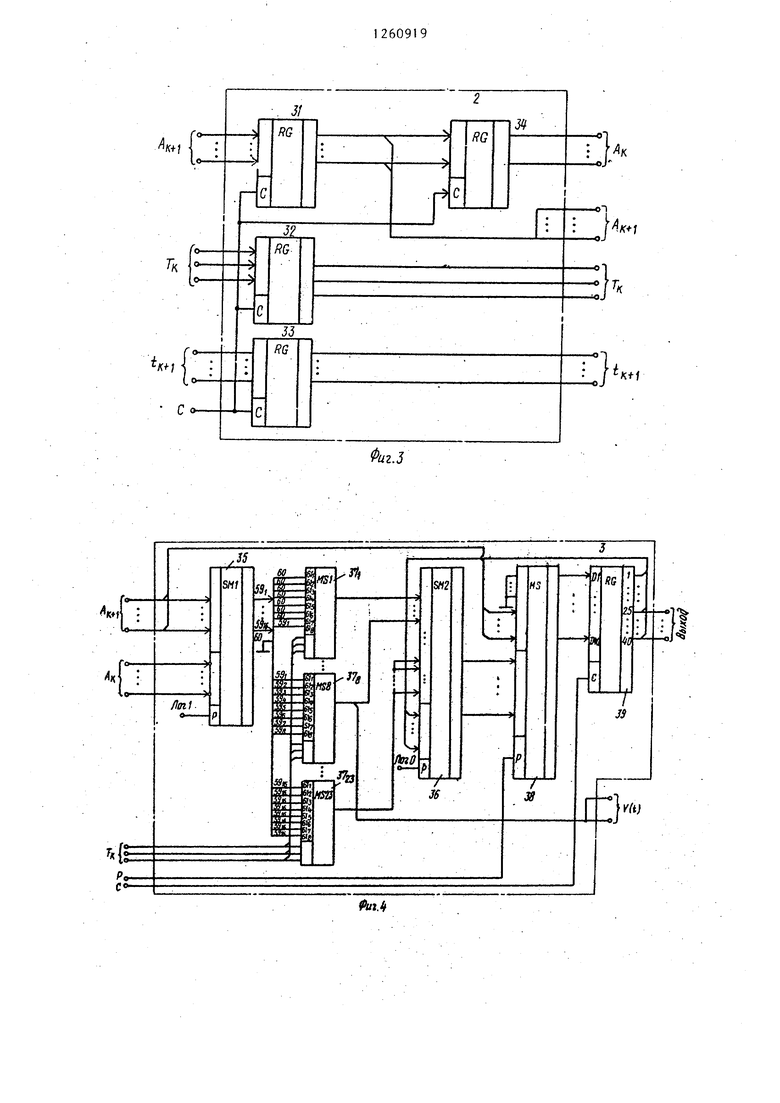
Блок 2 памяти (фиг.З) выполнен на регистрах 31 - 34.
Интерполятор 3 (фиг.4) выполнен на сумматорах 35 и 36, мультиплексорах 37 и 38 и регистре 39..
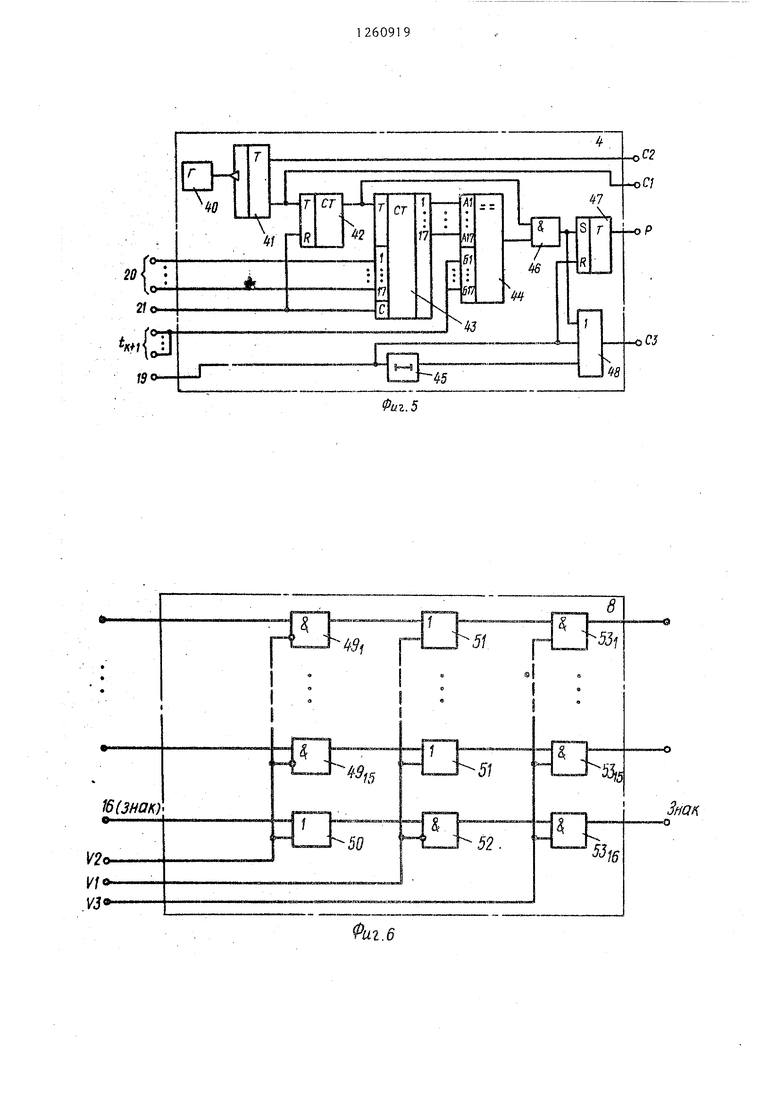
Блок 4 управления (фиг.З) содё| - жит генератор 40 импульсо, счетный триггер 4, двоичньй счетчик 42,
счетчик 43 текущего времени, схему 44 сравнения элемент 45 задержки, элемент И 46, триггер 47 и элемент ИЛИ 48.
Кодовый преобразователь 8 (фиг. 6) содержит группу 49 эле 1ентов ЗАПРЕТ, элемент ИЛИ 50, группу 51 элементов :Ш1И, элемент 52 ЗАПРЕТ и группу 53 элементов И.
Блок 18 контроля (фиг.7) содержит элементы 54 и 55 ИСКЛЮЧАЮЩЕЕ ИЛИ, два D -триггера 56 и 57 и элемент И 58.
Интерполятор 3 (фиг.4) содержит шины связи 59, и 60, а мультиплексоры 37 - входы 6L .
Устройство работает следующим образом.
После включения устройства необходимо осуществить привязку счетчиков времени блока 4 к текущему времени, для чего на входы 20 установки кода времени подается код времени, соответствующий ближайшей метке точного времени, а синхронизирующий вход 21 подключается к внешнему источнику меток точного времени, например, к системе единого времени. После привязки времени в считыватель 29 блока 1 устанавливается перфолента с программой и на вход 19 подается сигнал Сброс, который устанавливает триггер 15 в единичное состояние и, проходя через блок 4, формирует два сигнала СЗ, осуществляющих считывание двух первых кадров програм91ы. При этом на первой группе выходов блока 2 устанавливается
код А координаты первой опорной
точки, на второй -группе выходов - произвольный код, на третьей - нулевой код (в первой опорной точке программной траектории период интерполяции не указьшается), на четвертой - код t времени.
На управляющий вход 23 подается единичный сигнал Направление движения, если движение по программе
будет происходить преимущественно в сторону умерьщения угла, или нулевой сигнал, если движение будет происходить в сторону увеличения углд. На первой группе выходов интерполятора 3 устанавливается код А, а на выходе кодового преобразователя 8 поддерживается нулевой код в течение всего периода подготовки устройства к работе, так как сигнал Пуск на входе 22 отсутствует.
После подачи сигнала Пуск раз решается работа кодового преобразователя 8 и блока 9 постоянной памя- т°и на который поступают: на адресные входы а
- предстарший и
старший разряды кода датчика 3 обратной связи; на адресные входы а, 8L - передстарший и старший разряды кода А координаты первой опорной точки; н адресный вход А сигнал с выхода датчика 14 знака ; угла поворота; на адресный вход
- сигнал Направление движения На фиг.8 представлена рабочая зона углов, состоящая из шести квадрантов по 90 . Каждому квадранту присвоен трехразрядный код, состоящи
из двух старших разрядов кода датчика обратной связи и сигнала датчика знака угла поворота. Два первых разряда кода квадранта исходной точки равны предстаршему и старшему разрядам кода координаты первой опорной точки, а третий разряд кода квадранта исходной точки определяется с учетом направления движения антенны по программе с целью максимального
20
25
угол втягивания становится меньше 180 ,сигнал на первом (втором) йы- ходе блока 9 исчезает,при этом появ ляется единичньш сигнал на третьем выходе блока 9,который устанавливае триггер 15 по входу разрешения уста новки в ноль (К-вход) в нулевое сор
тояние. I
Нулевой сигнал с единичного выхо да триггера .15 запрещает работу эле мента И 16 и блока 9, при этом чере преобразователь 8 на преобразовател 0 поступает код с выхода сумматора 6. Код на выходе сумматора 6 (код рассогласования) равен разност
использования рабочей зоны. Например, программной координаты и координапри А -110 и при преимущественном движении антенны в сторону увеличения угла, код квадранта исходной точки нужно установить равным 101, при этом рабочая зона составит 520. Если код квадранта исходной точки взять равным 100 (в положительном секторе рабочей зоны, то рабо-. чая зона составит только 160°. Задача блока 9 обеспечит выбор исходной точки так, чтобы рабочая зрна использовалась максимально, сформировать управляющие сигналы для обеспечения втягивания в эту точку.
Алгоритм программы, размещенной в блоке 9 постоянной памяти, следующий : если антенна и исходная точка находятся в одном или соседних квадрантах рабочей зоны (фиг.8), то вырабатывается сигнал По кратчайшему расстоянию на третьем выходе блока 9 постоянной памяти; при всех остальных положениях антенны и исходной точки формируется сигнал Движение в + на первом выходе блока 9 (квад- рант исходной точки правее квадранта положения антенны), либо Движение в - на втором выходе блока 9
609194
(квадрант исходной точки левее квадранта положения антенны}.
На выходе кодового преобразователя 8 при наличии единичного сигна- 5 ла на первом (втором) выходе блока 9 формируется максимальный положитель- ный (минимальный отрицательный) код, который после преобразования в аналоговый сигнал поступает через уси- 10 литель 11 мощности на привод 12,
осуществляя его перемещение к исходной точке. После того, как привод оказывается в соседнем с исходной точкхэй квадранте, т.е. оставшийся
угол втягивания становится меньше 180 ,сигнал на первом (втором) йы- ходе блока 9 исчезает,при этом появляется единичньш сигнал на третьем выходе блока 9,который устанавливает триггер 15 по входу разрешения установки в ноль (К-вход) в нулевое сортояние. I
Нулевой сигнал с единичного выхода триггера .15 запрещает работу элемента И 16 и блока 9, при этом через преобразователь 8 на преобразователь 0 поступает код с выхода сумматора 6. Код на выходе сумматора 6 (код рассогласования) равен разности
программной координаты и координа
ты датчика обратной связи. Код координаты обратной связи поступает на инверсные входы сумматора 6, преобразуясь в обратный код, а подача
. логической единицы на вход переноса сумматора 6 обеспечивает выполнение сумматором 6 операции вычитания в дополнительном коде. Шестнадцатый (старший) разряд с выхода сумматора 6 является знаковым, а предстарший пятнадцатый - имеет вес 180 . Код рассогласования обеспечивает дальнейшее втягивание привода в исходную точку по кратчайшему расстоянию. После привода к исходной точке код рассогласования оказывается близким к нулю и привод удерживается в исходной (первой опорной) точке программы.
При сравнении текущего времени с временем первой опорной точки на выходе блока 4 появляется единичный сигнал Р, разрешающий работу интерполятора 3. Одновременно на пер вой группе выходов интерполятора 3 появляется изменяющийся код программной координаты, а на второй rpyn-f пе выходов - код скорости, который
512
пропускается элементами И группы 7 на входы сумматора 7. Под действием кода рассогласования привод начинает перемещаться по nporpaMNiHoft траектории, а на выходе сумматора 7 формируется код, равный сумме кодов программной координаты и скорости, являющийся упрежденной прогр 1м- мной точкой, в которую привод, придет через 1 с. Два старших разряда кода с выхода сумматора 7 и сигнал с датчика 14 подаются на блок 18 для анализа перехода упрежденной программной точки из рабочей зоны в запрещенную. На диаграмме (фиг.8) запрещенные квадранты обозначены о кодом 001 (переход за - 270 ) и кодом 110 (переход за +270J .
Если в процессе программного управления привод приближается к границе рабочей зоны на расстояние, равное тормозному участку, то упрежденная программа точка пересекает границу рабочей зоны, при этом блок 18 формирует импульсный сигнал, который перебрасывает триггер 15 по входу разрешения установки в едиь .
ницу (j-вход) в единичное состояние. Вновь включается режим втягивания, на выходе блока 9 появляется сигнал Движение в + ши, Движение в -, который формирует на выходе преобразователя 8 максимальный положительный или минимальный отрицательный код.
На выходе преобразователя-10 появляется управляющш сигнал с максимальной амплитудой и с обратным знаком по отношению к знаку управляющего сигнала в режиме управления по программе, которьш осуществляет торможение привода и его разворот на 360° с максимально допустимой скоростью. После прихода привода в соседний с программной точкой квад- рант, на третьем выходе блока 9 появляется единичньй сигнал По кратчайшему расстоянию.
После втягивания привода в программную точку вновь осуществляется управление по программной траектории,при этом блок 18 следит за переходом упрежденной программной точки в запрещенную зону и своевременно переключает устройство в режш- втя- гивания. Тормозной участок в устройстве выбран, равньгм величине скорости в общем случае он может быть любым.
19 6
пропорциональным скорости, однако для этого в сумматоре 7 необходимо суммирование второго слагаемого осуществлять с весовым коэффициентом.
Работа устройства поясняется диаграммами (фиг-.8) , на которых представлены рабочая и запрещенные зоны (диаграмма а), кодирование квад-. рантов (диаграммад) , значение пред- старщего и старщего разрядов кода датчиков 13 (диаграммы (5 ,&), значение сигнала с датчика 14 (диаграмма l) . На диаграммах е, ж представлены значения предстаршего и старщего разрядов кода с выхода сумматора 7 в режиме программного управления. Изменение значения указанных разрядов происходит ранее, чем заканчивается соответствующий квадрант рабочей зоны на величину тормозного участка (диаграммы приведены для случая движения от О к +270° и от О к -270 ). На диаграмме j представлен сигнал, появлякщийся с вы- хода блока контроля раньше подхода привода к границе рабочей зоны.
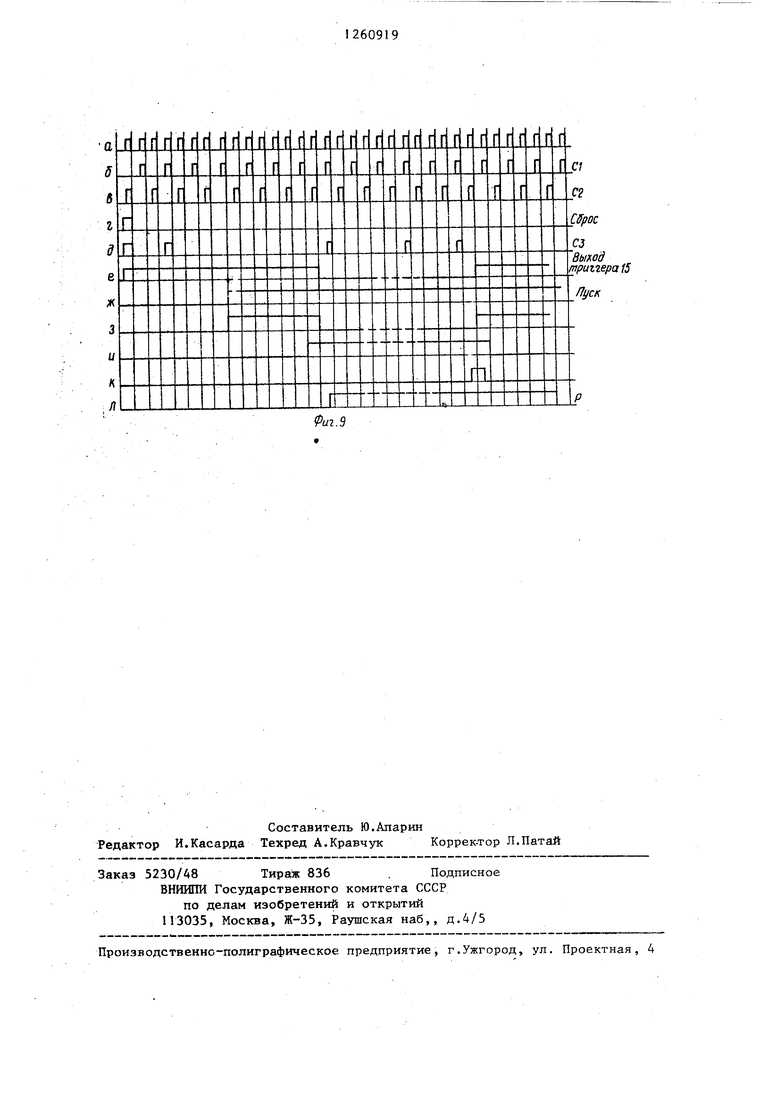
На фиг.9 приведены временные диаграммы работы устройства. На диаграмме и показаны импульсы тактового генератора 40 блока 4 управления, на диаграммах 6 , & - тактирующие сигналы С,, Cj, осуществляющие син- хронизаци о блоков устройства. На диаграмме 2 представлен сигнал Сброс, который вызывает формирование двух импульсов Cj (диаграмма и) Триггер 15 устанавливается в единичное оюстояние сигналом Сброс, либо сигналом с выхода блока 18 контроля, а в нулевое состояние - сигналом с третьего выхода блока 9 постоянной памяти (диаграмма fj . Синал Пуск (диаграмма жj подается после осуществления подготовительных операций. Сигнал на выходе элемента И 16 fдиаграмма j)определяет режим втягивания (единичное состояние J, либо режим управления по программе {нулевое состояние. Единичный сигнал на третьем выходе блока 9 (диаграмма и) появляется при подходе привода к заданной точке (в соседний квадрант, а импульсный сигнал на выходе блока 18 контроля (диаграмма к) появляется, если упрежденная программная точка находится за границей рабочей зоны. Сигнал Р (диаграмма) появляется после срав7
нения текущего времени и времени первой опорной точки программы.
Программная траектория задается в виде координат опорных точек на перфоленте, которая устанавливается в считыватель 29 блока 1.С приходом импульсного сигнала на вход С блока 1, триггер 25 устанавливается в единичное состояние, а сигнал с его единичного выхода, усиленный усилителем 27 поступает на вход П (пуск ленты) считывателя 29. Начинается продвижение ленты. На выходе считывателя 29 появляется информация в виде последовательности сигналов, которая записьтается в регистры 30. Управление сдвигом осу ществляется синхросигналом с выхода С считывателя 29. После считывания одного кадра информации, содержащего координаты одной опорной точки траектории, 1юявляется сигнал на пятом выходе считывателя,который - после стробирования синхросигналом со считывателя 29, устанавливает триггер 25 в нулевое состояние.
Формирователь 26.по переднему фронту сигнала вырабатывает короткий импульс, который после усиления поступает на вход 1 считывателя 29 для включения тормозного механизма считьшателя. Продвижение ленты прекращается. На регистрах 30 запоминается информация одного кадра, которая в виде параллельного двоичного кода выдается на выход. Размещение информации на ленте может быть произвольным. В одном кадре програм мы содержится информация угловой координаты , временной координа ты t .J, и периода интерполяции Т. . .
Указанная информация поступает в регистры 31-34 блока 2 памяти на соответствующие входы и заносится . по заднему фронту стробирующего сиг нала, поступающего на входы С регисров. Регистр 34 предназначен для хранения кода координаты предыдущей опорной точки А .
Интерполятор 3 работает следующим образом.
При нулевом сигнале Р мультиплексор 38 интерполятора 3 пропус- кает на D-входы регистра 39 код А координаты первой опорной точки с входов А интерполятора 3. При этом на вькоде интерполятора 3 устанавливается код А.,. Яри единичном
10
2609198
сигнале Р мультиплексор 38 пропускает HaD -входы регистра 39 код с выхода сумматора 36. Сумматор 36 и регистр 39,замкнутые в кольцо, обра- 5 зуют цифровой интегратор, осуществляющий формирование интерполяционной траектории суммированием ее приращений в каждом такте. Частота тактов определяется сигналом С, поступающим на синхровход регистра 39. Приращение координаты формируется сумматором 35, вычисляющим разность
Код координаты А поступает-, на инверсные входы сумматора 35, 5- преобразуясь в обратный код, а сигнал Логическая I, поступающий на вход Р переноса сумматора, преобра
зует обратный код А в дополнительный, благодаря чему сумматор 35 работает в режиме вычитания. Мультиплексоры 37 осуществляют сдвиг разности в сторону мпадших раз25
рядов на fr, ..
разрядов, где m
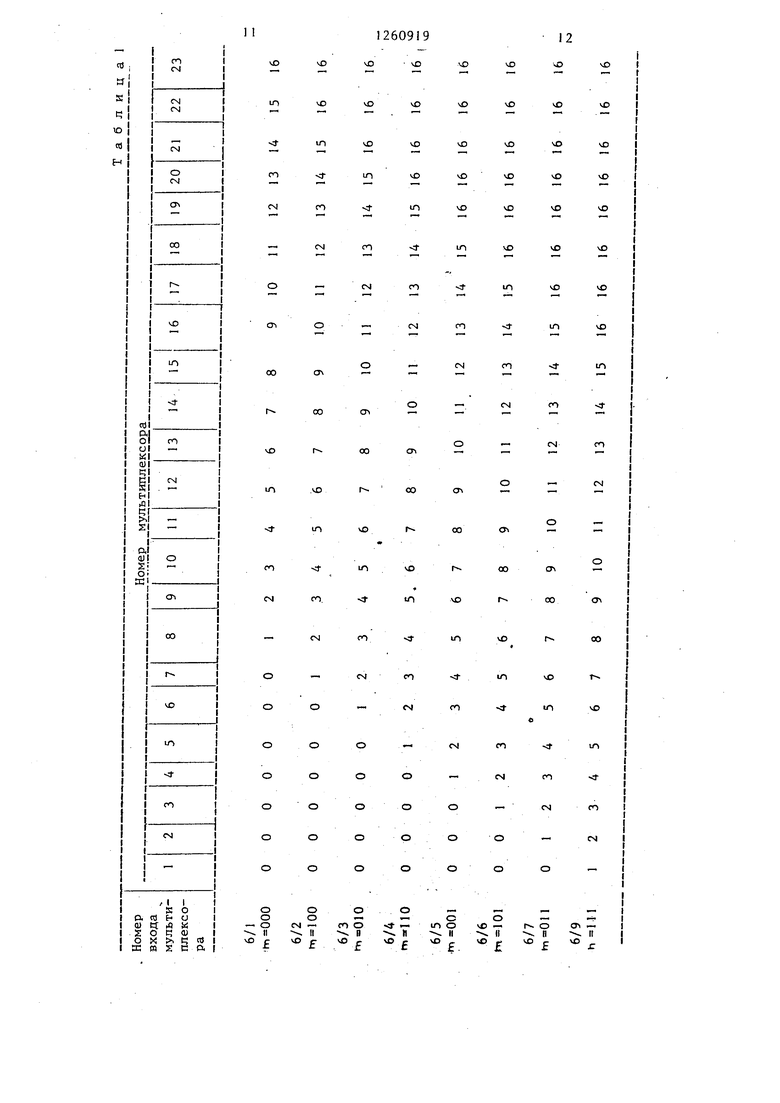
Для упрощения устройства опорные точки траектории выбираются так, чтобы период интерполяции Т , равн| 1й времени между к-2 и +1-й опорными точками, был кратен степени двойки, т.е. Т 2 с. При этом в кадре программы период интерполяции указывается в условном коде, равном . В табл.1 указаны связи шестнадцати выходов сумматора 35 с входами двадцати трех восьмиканальных мультиплексоров 37.В первом столбце ны номера входных каналов мультиплексоров и значение кода fTi , при котором разрешается соответствующий входной канал. В каждой позиции указан номер выхода сумматора 35,подключенного к данному входу мультиплексора 37, причем если ука450
5
0
то на
соответствующий 37
зан
вход мультиплексора 3/ подается нулевой сигнал, например. Корпус. Код с выходов мультиплек- : соров 37 подается на входы сумматора 36 со сдвигом на 17 разрядов в сторону младших разрядов. На старшие 17 разрядов подается сигнал с выхода 23-го мультиплексора.Дополни- тельный сдвиг кода с выхода мультиплексоров необходим для формирования приращения координаты за время, равное такту работы интерполятора, длительность которого опеделяется частотой сигнала С , авной 2 Гц.I
Блок управления работает следуюим образом.
Генератор 40 и триггер- 41 форми- 5 руют две тактовые последовательности импульсов с частотами 2 Гц, сдвинутые во времени друг относительно друга на полпериода, счетчик
42имеет 17 разрядов и делит часто- 10 ту 2 Гц до 1 Гц. Счетчик 43 осуществляет счет времени до 24 ч в двоичном коде. Схема 44 при равенстве кода времени со счетчика 43 и кода времени t. вьщает сигнал ра- 15 венства, который стробируется импульсом 1 Гц, поступающим на счетный
вход счетчика 43. Привязка счетчика
43текущего времени к реальному осу- , ществляется подач ей двоичного кода 20 времени, соответствующего приходу
метки точного времени, на входы счетчика 43 и импульсного сигнала метки точного времени на вход С этого счетчика. На вход 19 блока 4 по- 25 дается сигнал Сброс, устанавливающий триггер 48 в нулевое состояние. Из сигнала Сброс элемент 45 формирует И1«шульс, задержанный на 0,5-1 с (время задержки должно быть 30 не менее времени считывания одного кадра информации в блоке 1 ввода). От одного входного сигнала Сброс. на выходе элемента ИЛИ 48 появляется пара импульсных сигналов С. При 35 первом равенстве текущего времени , и времени t на выходе .элемента И 46 появляется импульс, устанавливающий триггер 47 в единичное состояние и поступающий через элемент ИЛИ 48 на 40 выход С, блока. Единичный сигнал с выхода триггера 47 поступает на вход Р блока управления.
Преобразователь 8 работает еле-, дующим образом.45
Если сигналы V , V,. нулевые, а сиг нал V,j единичный, то входной код передается на выход кодового преобразователя 8 без изменений. При единичном сигнале V на выходах кодово- $0 го преобразователя устанавливается максимальный положительный код П1 ... 110, при единичном сигнале Vj - минимальный отрицательный код 000....001, а при нулевом сигнале 55 ну.певой код 00...00.
Блок 1В формирует импульсный сигнал при изменении на входах кода из состояния 101 в состояние 001, или из состояния 010 в состояние 11 Формирование выходного импульса осуществляется следующим образом. При изменении состояния первого и второго входов из 10 в 00 или 01 в 11 состояние выходного сигнала элемента ИСК.ЛЮЧАЮЩЕЕ ИЛИ 55 изменяется .с единицы на нуль, при этом триггеры 56 и 57 под действием тактовых импульсов С. , С, также изменяют сво состояние из единичного в нулевое. Так как состояние триггера 57 изменяется с задержкой по отношению к изменению состояния триггера 56, на входах элемента И 58 в течение некоторого времени оказываются все единичные сигналы, при этом на выходе блока контроля формируется импульсный сигнал.
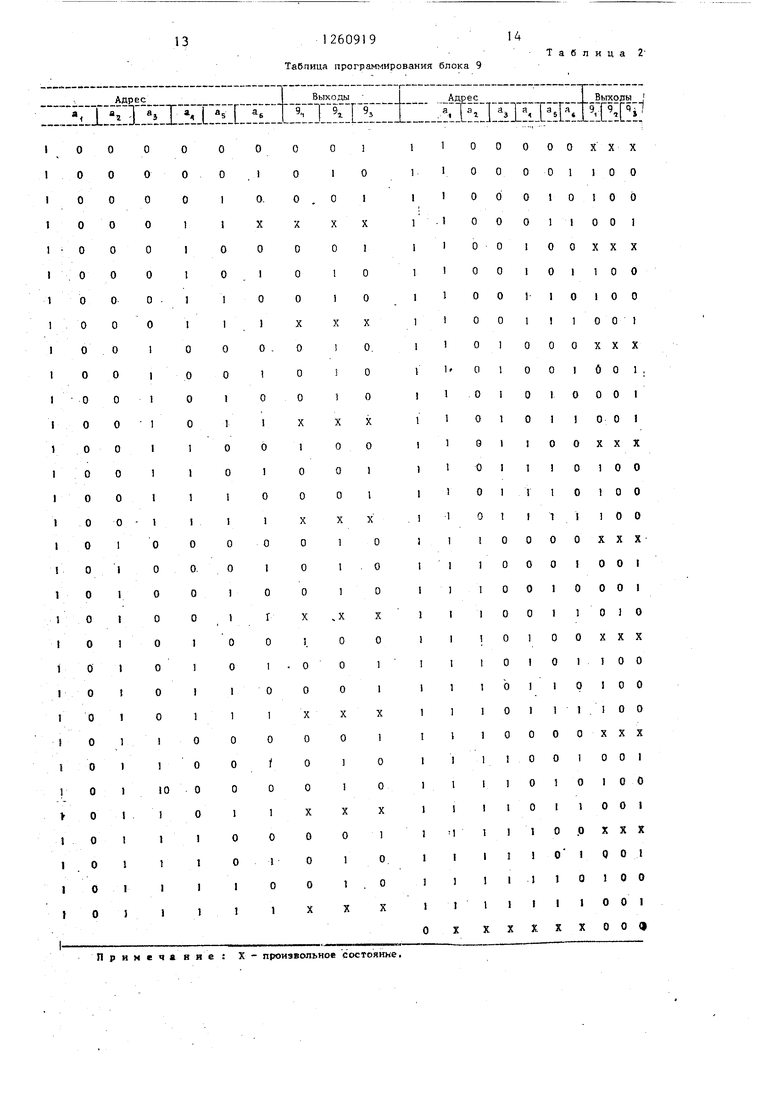
Блок 9 представляет собой постоянное запоминающее устройство. Программа, размещенная в блоке 9 постоянной па.мяти, представлена в табл.2.
Благодаря автоматическому контролю при подходе привода к границам рабочей зоны и торможению, исключаются аварийные ситуации. Автоматический разворот антенны на с предельно допустимой скоростью уменьшает время разворота. При выполнении операций разворота антенны на 360- вручную оператор затрачивает от 2 до 5 мин, -а при до1тустимой скорости 10 /с разворот антенны при управлении предлагаемым устройством осуществляется за 45-50 с.
Следствием полученного эффекта является максимальное использование рабочей зоны при управлении по программе.
Исключение аварийных ситуаций пр подходе к границам рабочей зоны позволяет полнее использовать эти участки5В то время как при визуальном контроле подход-близко к границам рабочей зоны не допускался. Уменьшение времени на разворот антенны позволяет сократить разрывы в работе при управлении по траекториям, пересекающим границы рабочей зоны антенны.
13126091914
Таблица 2 Таблица программирования блока 9
Примечи в яе: Х- произвольное состояние.
ормула
15 изо
I2
бретення
Устройство для программного управления электроприводом, содержащее jрегистр действительного угла пово- рота, интерполятор, первый сумматор, кодовый преобразователь, цифро- аналоговый преобразователь, усилитель мощности, привод, блок постоянной памяти, датчик знака угла поворота, датчик обратной связи, блок ввода,блок памяти и блок управления причем первая, вторая и третья группы информационных входов интерполятора соединены с первой, второй и третьей группами выходов блока памяти, а первая группа выходов - с первой группой входов первого сумматора j вторая группа входов которого через регистр действительного угла поворота соединена с выходами датчика обратной Связи, а выходы сумматора через кодовый преобразователь соединены с входами цифроаналогово- го преобразователя, выход которого через усилитель мощности соединен с приводом, механически связанным с датчиком обратной связи и датчиком знака угла поворота, причем выход датчика знака угла поворота соединен с первым адресным входом блока постоянной памяти, а выходы блока ввода соединены с входами блока памяти, отличающееся тем, что, с целью повьппения надежности и быстродействия устройства, в него введены второй сумматор, триггер, группа элементов И, элемент И и блок контроля, причем четвертая группа выходов блока памяти соединена с первой группой информационных входов блока управления, вторая группа информационных входов которого соединена с входом установт ки кода времени устройства,а стро- бирующий вход - с синхронизирующим входом устройства, при этом первый синхронизирующий выход блока управления соединен со стробирукяцими входами интерполятора, регистра
I260919
16
10
t5
20
5
действительного угла поворота и с первым стробирукщим входом блока контроля, второй синхронизирующий ° выход блока управлени я соединен со стробирукщим входом триггера, и вторым стробирующим входом блока контроля, третий синхронизирующий, вьтход блока управления соединен со стробирующими входами блока ввода и блока памяти, а управлякнций выход блока управления соединен с управляющим входом интерполятора, первая группа выходов которого сое- динед€а с первой группой входов вто рого сумматора, а вторая группа выходов интерполятора через группу элементов И соединена с второй группой входов второго сумматора, выходы двух старших разрядов которого подключены к второму и третьему адресным входам блока постоянной памяти и к первому и второму входам блока контроля, третий вход которого соединен с выходом датчика знака угла поворота, а выход - с входом разрешения установки в 1 триггера, нулевой выход которого соединен с вторыми входами элементов И группы, причем четвертый адресный вход блока постоянной памяти соединен с управлякщим входом устройства, пятый и шестой адресные входы - с выходами двух старших разрядов датчика обратной связи, первый выход - с входом установки максимального кода преобразователя кодов, й -орой выход - с входом установки минимального кода преобразователя кодов, а третий выход - с входом разрешения установки в О триггера j вход установки в 1 которого соединен с входом сброса блока управления и входом сброса устройства, а пусковой вход устройства соединен с входом установки нулевого кода преобразователя кодов и с первым входом элемента И, второй вход которого соединен с единичным выходом триггера, а выход - с управ- 0 ляющим входом бдока постоянной памяти.
0
5
0
5
Со
2В C/7-J и
тШ}
3
Ktf
,
м
аг.6
Запрещ, зона
Радочая зона
торможения
Фиг.7
3anpeu4. зона
Фиг.8
Зона для /пормоскеиия
Фиг.В
Составитель Ю.Апарин Редактор И.Касарда Техред А.Кравчук Коррек-тор Л.Патай
Заказ 5230/А8 Тирок 836 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления | 1984 |
|
SU1246055A1 |
| Устройство для программного управления | 1985 |
|
SU1249482A1 |
| Цифровой линейный интерполятор | 1990 |
|
SU1805449A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| МНОГОКАНАЛЬНЫЙ ИНТЕРПОЛЯТОР ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯМИ РАБОЧИХ ОРГАНОВ АВТОМАТИЧЕСКИХ | 1973 |
|
SU386383A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Цифровой преобразователь координат | 1980 |
|
SU943715A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1493408A1 |

Изобретение относится к автома. тическому управлению, в частности к специализированнь1м управляющим устройствам, и может быть использовано . в системах программного управления радиотелескопами. Цель изобретения- повьппение надежности устройства пу- тем автоматического контроля и торможения при подходе к границам рабочей зоны и повьшение быстродействия устройства путем уменьшения времени разворота электропривода. Блок управления формирует два сигнала, которые , воздействуя на блок ввода, приводят к считыванию двух первых кадров программы управления электроприводов. Затем пусковым сигналом разрешается работа блока пострян- . ной памяти, где размещена программа работы устройства. На выходе кодового преобразователя формируется код управления приводом, котогзый после преобразования в цифроанапо- говом преобразователе поступает через усилитель мощности на привод, осуществляя его перемещение к исходной точке программы.Код рассогласования, поступающий на вход кодового преобразователя, формируется первым сумматором в виде разности программной координаты и координаты датчика обратной связи. При сравнении текущего времени с временем первой опорной точки блок управления разрешает работу интерполятора, при этом на выходе второго сумматора формируется код упрежденной программной точки, старшие разряды которого, а также сигнал с датчика знака угла поворота подаются на блок контроля для анализа перехода упрежденной программной точки из рабочей зоны в запрещенную. 9 ил. 2 табл. с (Л to Од о со
| Патент США № 34448360, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления электроприводом | 1981 |
|
SU1004977A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
