Известно устройство для управления радиотелескопом в азимутальной монтировке, в котором используется счетная машина типа «Урал. Преобразование координат в этом устройстве выполняется до сеанса наблюдения. Программа движения радиотелескопа задается с помощью перфоленты. При смене объекта наблюдения или изменении режима слежения необходимо менять перфоленту и, следовательно, производить привязку ее движения к единому времени. Кроме того, в известном устройстве невозможно осуществлять коррекцию исходных данных в процессе слежения.
Предлагаемое устройство, содержащее устройства ввода исходных даппых в экваториальной системе координат и электрические следящие приводы для вращения радиотелескопа по азимуту и углу места, свободно от указанных недостатков.
Для повышения надежности и точности слежения оно содержит цифровое счетно-решающее устройство, выходы угловых рассогласований по азимуту и углу места которого подсоединены через запоминающие регистры и группы усилителей к входам преобразователей кода в напряжение, вторые входы которых через вторые группы усилителей и соответствующие запоминающие регистры подключены к выходам дающих скоростей по азимуту и
углу места счетпо-рещающего устройства, а третьи входы преобразователей подсоединены к тахогенераторам, механически связанным с осями азимута и угла места радиотелескопа. К цифровому счетно-решающему устройству подключен выход сельсина коррекции кода азимута, механически связанного с азимутальной осью и установленного на цене оборота, превышающей рабочую зону радиотелескопа,
что позволяет расширить рабочую зону датчика угла азимута при выходе радиотелескопа из зоны однозначности.
Устройство позволяет обеспечить высокую точность слежения при низкой частоте смены
информации на выходе преобразователя координат. Низкая частота смены информации позволяет применить в преобразователе координат высоконадежные низкочастотные логические элементы, что увеличивает надежность
всего устройства управления радиотелескопом.
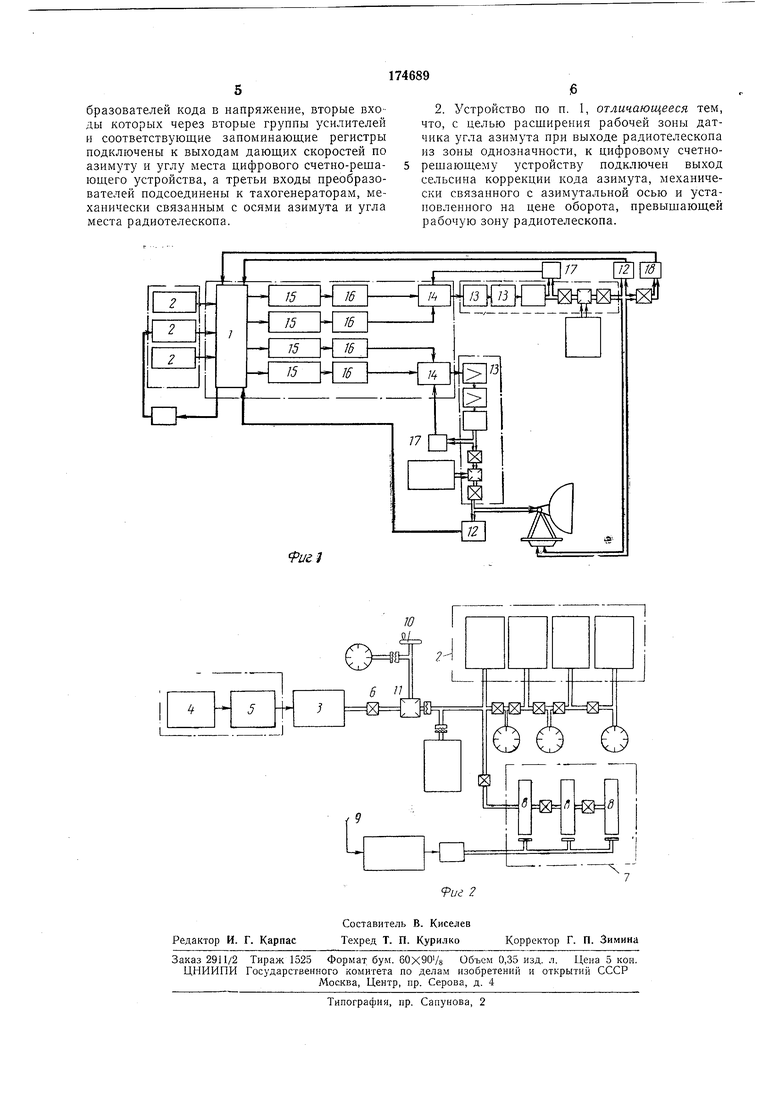
На фиг. 1 и 2 изображена блок-схема устройства. В электроппое цифровое счетно-решающее
устройство 1 с помощью системы цифровых датчиков 2 вводятся значения координат в виде склонения б, прямого восхождения а и текущего времени 5. Вычисление часового угла t по выражению устройстве. Ввод координат а, б и 5 вместо и б позволяет при переходе на другой объект наблюдения менять только значение а и б и не производить привязки текущего времени, вводимого в счетно-решающее устройство непрерывно. Привязка текущего времени S к истинному времени производится только один раз в начале работы. Ввод текущих значений 5 производится вращением указанной системы цифровых датчиков 2 синхронным двигателем 3 (см. фиг. 2), на который подается напряжение стабилизированной частоты от кварцевого генераторам через делитель частоты 5. Текущее время вводится либо в звездном, либо в солнечном масштабах. Смена масштабов производится из менением передаточного числа редуктора о между синхронным двигателем и цифровыми датчиками. Для привязки значений текущего времени, вводимых в счетно-решаюшее устройство, к истинному времени имеется печатающее устройство 7, цифровые барабаны 8 которого кинематически связаны с датчиками 2. Печатающее устройство срабатывает но радиосигналу единого времени 9. Из сравнения значения времени, полученного на отпечатке, с истинным временем в момент прихода сигнала единого времени определяется величина необходимой коррекции. По этой величине рукояткой ручного ввода 10 через дифференциал 1J осуществляется доворот датчиков ввода S. По введенным координатам а, б и 5 цифровое счетно-решающее устройство вычисляет значение азимута Л и угла места h (преобразует координаты). Кроме того, счетно-решающее устройство выполняет следующие операции: вычисляет значения дающих скоростей и углов рассогласования по Л и /г, производит, преобразование в обычный двоичный код кода Баркера, поступающего с цифровых датчиков ввода а, б и S, и кода Грея, поступающего с датчиков 12 обратной связи, установленных на осях радиотелескопа. Следящий привод 13 каждой оси управляется по скорости с коррекцией по углу. Значения угла рассогласования и дающей скорости, вычисляемые счетно-решаюшим устрой стБом, имеют дискретность по уровню и по времени. Дискретный сигнал дающей скорости в выходном преобразующем устройстве 14 сравнивается с непрерывным сигналом принимающей скорости. Следящий привод при этом управляется сигналом, пропорциональным разности дающей и принимающей скоростей. При управлении по скорости происходит накопление угловой ошибки. Если накапливающаяся угловая ошибка превысит величину дискретности по уровню (но углу), то при очередной смене информации от цифрового счетно-решающего устройства па следящий привод подается сигнал угловой коррекции. Корректирующий сигнал остается неизменным до следующей смены информации. Описанный метод управления (комбинированное управление) позволяет существенно снизить частоту смены информации и, следовательно, тактовую частоту вычислительной машины. Выходы угловых рассогласований и дающих скоростей цифрового счетно-решающего устройства через запоминающие регистры 15 к группы усилителей 16 подключены к выходным преобразующим устройствам 14, представляющим собой магнитные усилители, имеющие двоично-взвешенные обмотки управления, на которые подаются преобразуемые коды. Кроме того, магнитные усилители имеют обмотки управления, на которые подаются аналоговые сигналы с тахогенераторов 17 (сигналы принимающей скорости). Выходные напряжения магнитных усилителей nponopiuiональны углам рассогласования соответственно по азимуту и углу места, сложенным : разностями дающих и принимающих скоростей. Рабочая зоная радиотелескопа превышает 360. Поэтому имеется зона, в которую радиотелескоп может зайти как при вращении по часовой стрелке, так и при вращении против часовой стрелки. Датчик обратной связи 12 имеет рабочую зону от О до 360° и от него нельзя получить информацию о том, с какой стороны пришел радиотелескоп в зону, превышающую 360°. Для получения информации о положении радиотелескопа в указанной зоне применяется дополнительный датчик угла 18 (сельсин коррекции кода азимута), установленный па цене оборота, превышающей рабочую зону радиотелескопа. Сигнал этого сельсина используется в счетiio-решающем устройстве для выработки дополнительного разряда в коде азимута с весом 360°. При добавлении этого разряда общая рабочая зона обоих датчиков угла по азимуту расширяется до 720°, что превосходит рабочую зону радиотелескопа. Тем самым неоднозначность положения радиотелескопа устраняется. Предмет изобретения 1. Устройство для управления радиотелескопом в азимутальной монтировке, содержащее устройства ввода исходных данных в экваториальной системе координат и электрические следящие приводы для вращения радиотелескона по азимуту и углу места, отличающееся тем, что, с целью повышения надежности и точности слежения, оно содержит цифровое счетно-решающее устройство, выходы угловых рассогласований по азимуту и углу места которого подсоединены через запоминающие регистры и группы усилителей к входам прео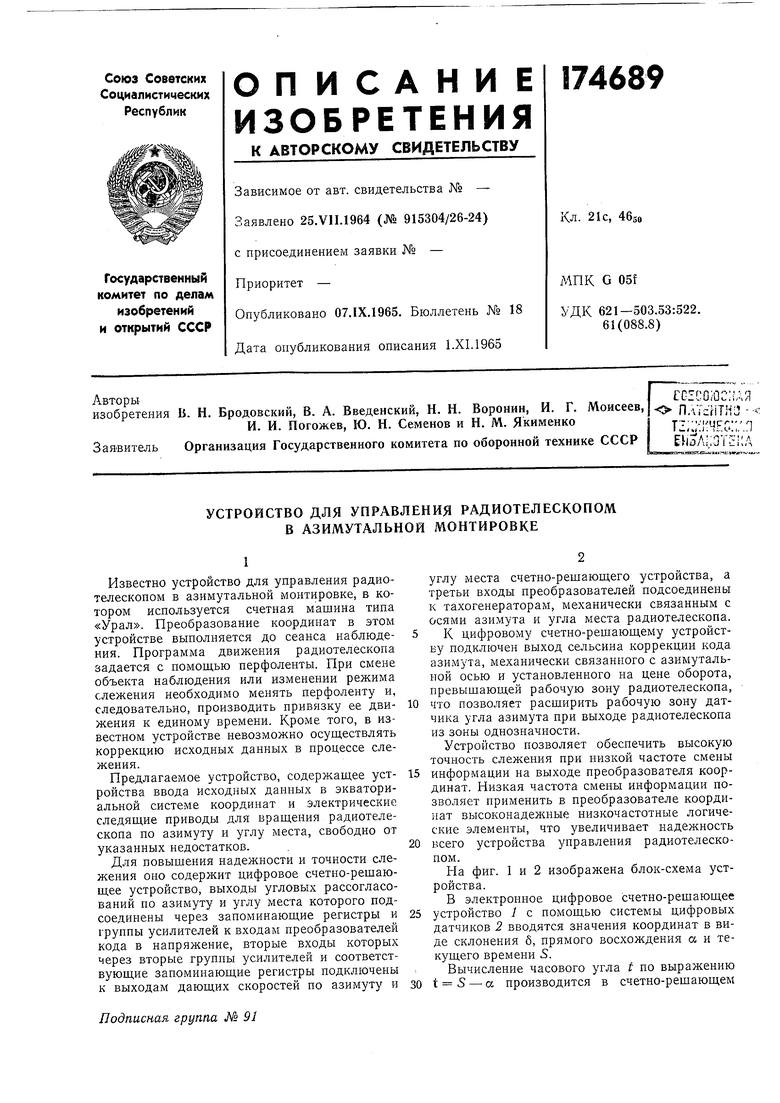
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1981 |
|
SU1004977A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ И СЛЕЖЕНИЯ | 1971 |
|
SU428211A1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СПОСОБ ПРОГРАММНО-КОРРЕКТИРУЕМОГО СОПРОВОЖДЕНИЯ ЦЕЛИ | 2022 |
|
RU2795367C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 2020 |
|
RU2751433C1 |
| Устройство управления угловым положением объекта регулирования | 1983 |
|
SU1117589A1 |
| Устройство для наведения радиотелескопа | 1975 |
|
SU544026A1 |
| Устройство для управления разворотами радиотелескопа | 1979 |
|
SU930229A1 |