(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРА РАЗДЕЛКИ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 1992 |
|
RU2031460C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЧАСТИЧНО ПОВРЕЖДЕННОЙ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА, КАМЕРА ДЛЯ РАЗДЕЛКИ И ФАЛЬШТВЭЛ ДЛЯ ВОССТАНОВЛЕНИЯ ТОПЛИВНОЙ СБОРКИ | 1992 |
|
RU2072569C1 |
| Захватная головка манипулятора | 1976 |
|
SU613891A1 |
| Карусельная автоматическая формовочная машина Набокина | 1982 |
|
SU1031634A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Устройство страховочное для транспортировки отработавших гамма-камерных тепловыделяющих сборок | 2019 |
|
RU2722887C1 |
| УСТРОЙСТВО РАЗДЕЛКИ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 1992 |
|
RU2069902C1 |
| Прибор для измерения механических и гидравлических величин | 1932 |
|
SU44707A1 |
| Устройство для сборки резьбовых соединений | 1985 |
|
SU1328138A1 |
| Устройство для формированияиздЕлий "МюзлЕ | 1977 |
|
SU816637A1 |
1
Изобретение относится к грузоподъемному оборудованию и может быть использовано в конструкциях манипуляторов, обслуживающих камеры разделки топливных сборок ядерных реакторов.
Известен захват, содержащий центральный стержень, закрепленный в шпинделе манипулятора, поворотные JQ рычаги, установленные на осях, расположенных на центральном стержне, и захватные рычаги с приводом их перемещения 1 .
Недостатком известного захвата является то, что он не позволяет трав - спортировать вертикально стоящие изделия .
Целью изобретения является расширение технологических возможностей 20 захвата.
Это достигается тем, что захват снабжен расположенным в шпинделе управляющим стержнем, захватные рыча-ги размещены в пазах, выполненньак в 25 поворотных рычагах, а привод перемещения захйатных рычагов выполнен в виде охватывающей центральный стержень трубы, верхним концом кинематически связанной с управляющим стерж- 30
нем, а нижним концом шарнирно связанной с захватньп.-ш рычагами; поворотные рычаги выполнены Г-образными. Причем длинное плечо рычага в поперечном сечении имеет полукруглый профиль, а в коротком плече рычага выполнен трапециедальный паз; пазы под захватные рычаги расположены в коротком плече Г-образных рычагов симметрично трапециедальному пазу; в нижней части де 1трального стержня установлен палец, концы которого выступают за пределы центрального стержня; на длинном плече Г-образного рычага выполнен фигурируй паз, профиль которого соответствует профилю нижней части центрального стержня; в поворотных рычагах, в пазах под захватные рычаги, выполнены криволинейные поверхности, по форме соответствующие профилю захватных рычагов.
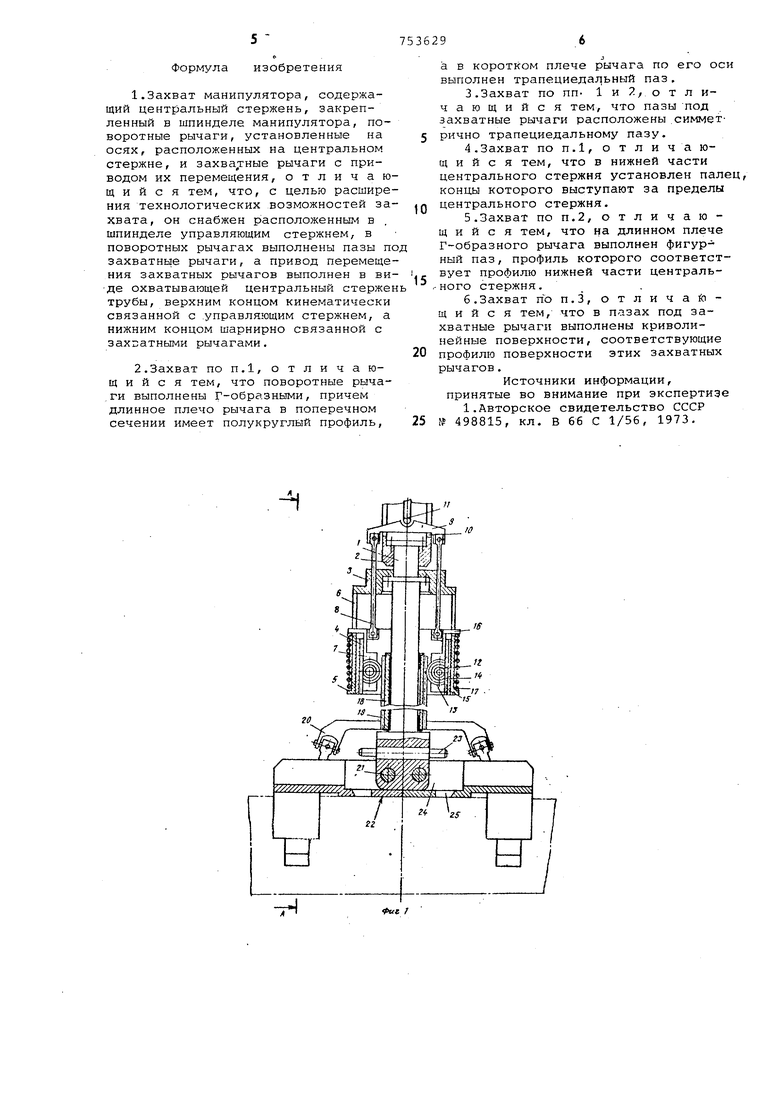
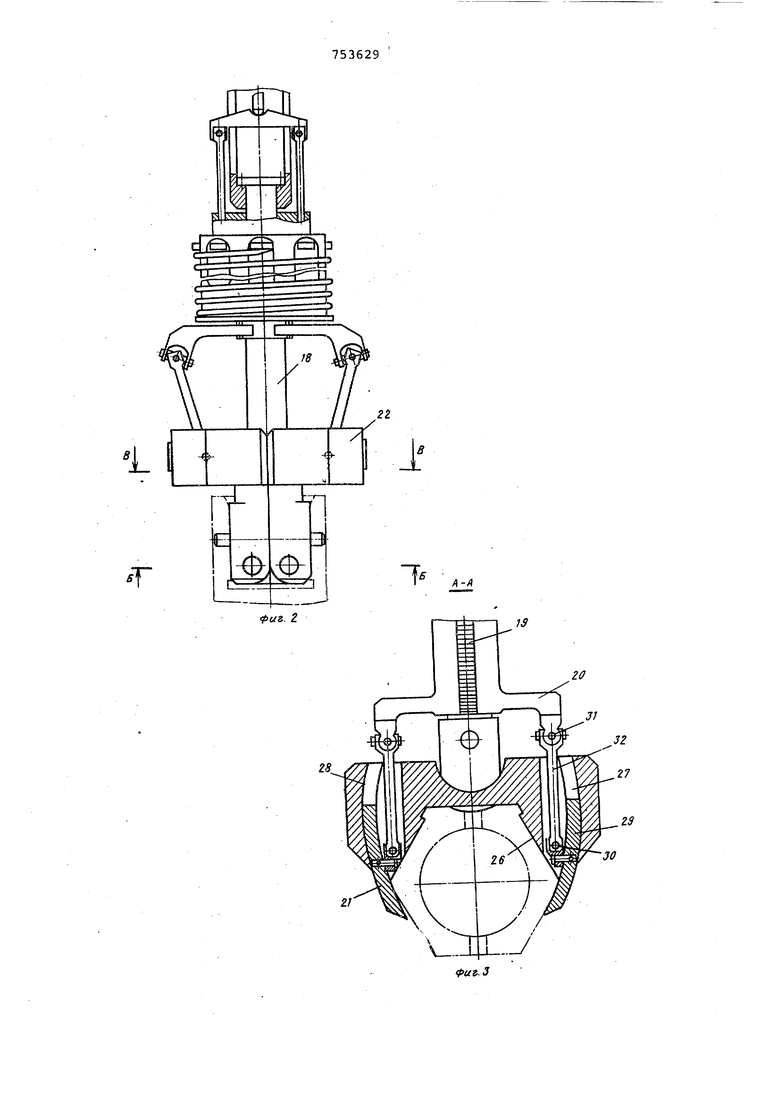
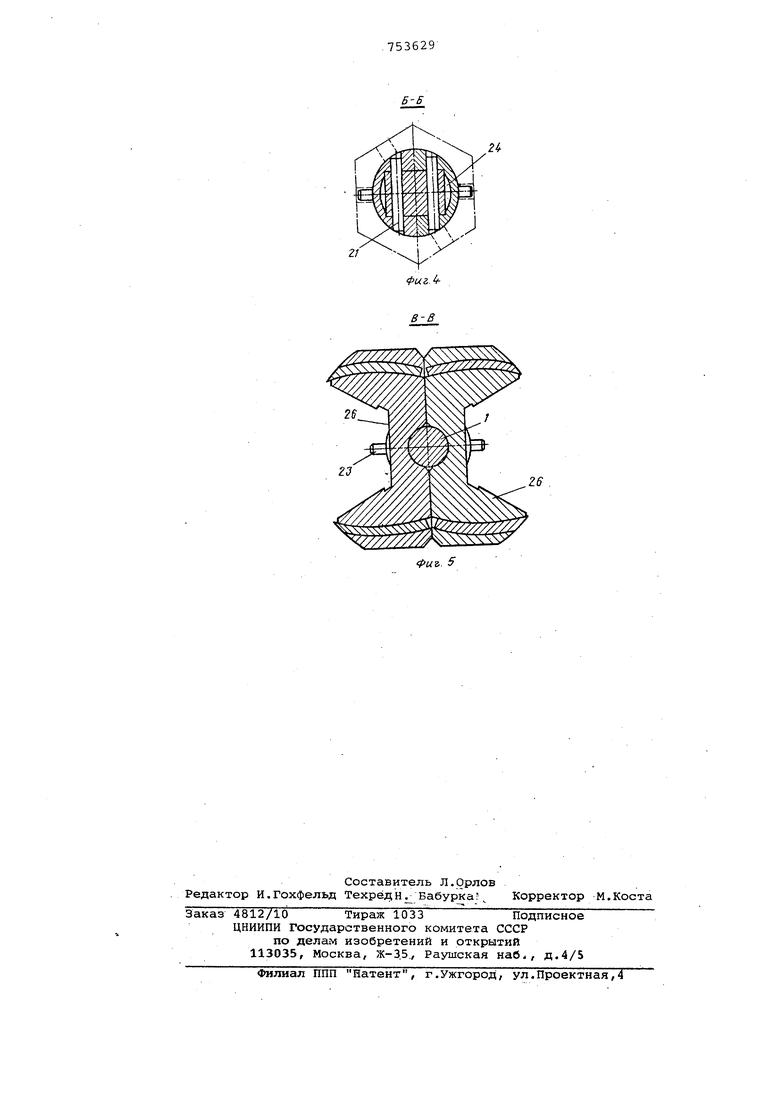
На фиг. 1 изображен предлагаемый захват в положении транспортировки горизонтально лежащих сборок; на фиг. 2 - то же, в положении транспортировки вертикально стоящих сборок j на фиг. 3 - разрез А-А фиг.1; на фиг. 4 - разрез Б-Б фиг. 2; на фиг. 5 - разрез В-В фиг. 2..
Захват манипулятора содержит ценральный стержень 1, неподвижно зарепленный в шпинделе 2 манипулятоа. На стержне 1 .закреплен стакан 3. На внутренней поверхности стакана 3 выполнены диаметрально противоположные зубчатые рейки 4. В нижней части зубчатых реек 4 имеет-ся цилиндрический фланец 5. В верхней части стакана 3 параллельно рейкам 4 выполнены равномерно по окружности восемь пазов 6.
Внутри стакана 3 перемещается ползун 7, соединенный шарнирными тягами 8 с коромыслом 9, расположенным в пазе 10 шпинделя 2. Коромысло 9 контактирует с управляющим стержнем 11 манипулятора .в нижней части ползуна 7 на осях 12 установлены зубчатые блоки 13, содержащие малую шестерню 14 и большую шестерню 15. в верхней части ползуна 7 имеются восемь выступов 16, проходящих : через пазы 6 за пределы стакана 3 и образующие упоры для пружины 17, контактирующей своим нижним торцом с фланцем 5 стакана 3.
Стержень 1 охватывается трубой 18, на которой выполнены две диаметрально расположенные зубчатые рейки 19, каждая из которых сцеплена с большой шестерней 15. Малая шестерня 14 сцеплена с рейкой 4. К нижней части трубы 18 диаметрально противоположно прикреплены вилки 20.
В нижней части стержня 1 на осях 21 установлены Г-образные рычаги 22, а над осями 21 в направлении, перпендикулярном этим осям, закреплен палец 23, выступающий за пределы стержня 1. Длинное плечо Г-образного рычага 22 в поперечном сечении имеет форму полукруга, а вдоль этого плеча выполнен фигурный паз 24, форма которого определяется формой нижней части стержня 1. На этом же плече имеется отверстие 25, которое обеспечивает проход выступающего конца пальца 23,
В коротком плече Г-образного рычага 22 выполнен трапециедальный паз 26 параллельно фигурному пазу 24. Симметрично трапециедальному пазу 26 в коротком плече Г-образного рычага 22 выполнены два паза 27, имеющих криволинейные поверхности 28. С этими криволинейными поверхностями контактируют захватные рычаги 29. Захватные рычаги 29 с помощью универсальных шарниров 30 и 31 и тяг 32 соединены с вилкой 20.
Захват работает следующим образом.
Перегрузка вертикально стоящей топливной сборки осуществляется захватом, у которого Г-образные рычаги 22 повернуты.на осях 21 и охватывают трубу 18 (см.фиг.2). Хвостови-; захвата, образованный длинными плечами Г-образных рычагов 22, вводится в головку топливной сборки, в которой имеются пазы под байонетный замок.
йь-зс-тупающие концы пальца 23 вводятся - 5ТИ пазы и топливная сборка оказывается сцепленной с захватом.
Перегрузка горизонтально расположенной топлив-ной сборки осуществляется захватом, у которого Г-образные рычаги 22 повернуты на осях 21 в положение, изображенное на фиг.1. Для перевода захвата из положения (фиг. 2 в положение (фиг.1) необходимо управляющим стержнем 11 переместить вниз коромысло 9. Через тяги 8 будет перемещаться ползун 7 совместно с зубчатыми блоками 13, сжимая пружину 17. При перемещении вниз ползуна 7 малая шестерня 14 перекатывается по рейке 4 и вызывает вращение большой шестерни 15, которая перемещает вниз трубу 18 относительно неподвижного стержня 1, Так как Г-образные рычаги 22 одним концом установлены на неподвижном стержне 1, а другой конец кинематичеки связан с трубой 18, то при движении трубы 18 вниз будет происходить разворот.Г-образных рычагов 22 относительно осей 21. Поворот Г-образных рычагов 22 будет происходить до положения, указанного на фиг. 1, при котором длинные плечи Г-образных рычагов 22 образуют жесткий стержень, пепендикулярный трубе 18. До момента, пока Г-образные рычаги 22 не развернутся до положения, указанного на фиг.1, захватные рычаги 29 занимают положение, указанное на фиг.5. Это обусловлено тем, что криволинейная поверхность 28 выполнена таким образом, что образуется эффект самоторможения при торможении усилия от трубы 18 на захватные рычаги 29 через тяги 32. Когда Г-образные рычаги 22 займут положение, указанное на фиг.1 перемещением трубы 18 осуществляется вьщвижение захватных рычагов 29 из пазов 27. Это выдвижение происходит до контакта трапециедальных пазов 26 с поверхностью топливной сборки. Топливная сборка оказывается сцепленной с захватом (см.фиг.3).
При подъеме захвата топливная сборка своим весом препятствует возвращению захватных рычагов 29 в пазы 27 под действием сжатой пружины 17 в случае непредвиденного отвода управляющего стержня 11 от -хоромысла 9.
Расцепление захватных рычагов 29 с топливной сборкой возможно только при условии, что ее вес не .воздействует на захватные рычаги. В этом случае пружина 17, разжимаясь, перемещает ползун 7 вверх (управляющий стержень 11 при этом отведен от.коромысла 9) , который через зубчатый блок 13 поднимает трубу 18. Тяги 32 вначале вдвигают захватные рычаги 29 в пазы 27, а затем разворачивают Г-образные рычаги 22 в исходное положение (см,фиг. 2 и 3). Формула изобретения 1.Захват манипулятора, содержащий центральный стержень, закрепленный в шпинделе манипулятора, поворотные рычаги, установленные на осях, расположенных на центральном стержне, и захва,тные рычаги с приводом их перемещения, отличаю щийся тем, что, с целью расшире ния технологических возможностей за хвата, он снабжен расположенным в шпинделе управляющим стержнем, в поворотных рычагах выполнены пазы п захватнь1е рычаги, а привод перемеще ния захватных рычагов выполнен в ви де охватывающей центральный стерже трубы, верхним концом кинематически связанной с .управляющим стержнем, а нижним концом шарнирно связанной с захБатными рычагами, 2.Захват поп.1, отличающийся тем, что поворотные рыча, ги выполнены Г-образными, причем длинное плечо рычага в поперечном сечении имеет полукруглый профиль.
10
J а в коротком плече рычага по его оси выполнен трапециедальный паз, 3.Захват по пп- 1 и 2, о т л ичающийся тем, что пазы под захватные рычаги расположены симметрично трапециедальному пазу. 4.Захват по п.1, отличающийся тем, что в нижней части центрального стержня установлен палец, концы которого выступают за пределы центрального стержня. 5.Захват по п.2, отличающийся тем, что на длинном плече Г-образного рычага выполнен фигурный паз, профиль которого соответствует профилю нижней части центрального стержня. 6.Захват поп.З, отличайщ и и с я тем, что в пазах под захватные рычаги выполнены криволинейные поверхности, соответствующие профилю поверхности этих захватных рычагов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 498815, кл. В 66 С 1/56, 1973,
