Фиг.З
Изобретение относится к буровой технике, а именно к агрегатам для бурения скважин различного назначения.
Цель изобретения - повышение произво- дительности и надежности работы бурового агрегата.
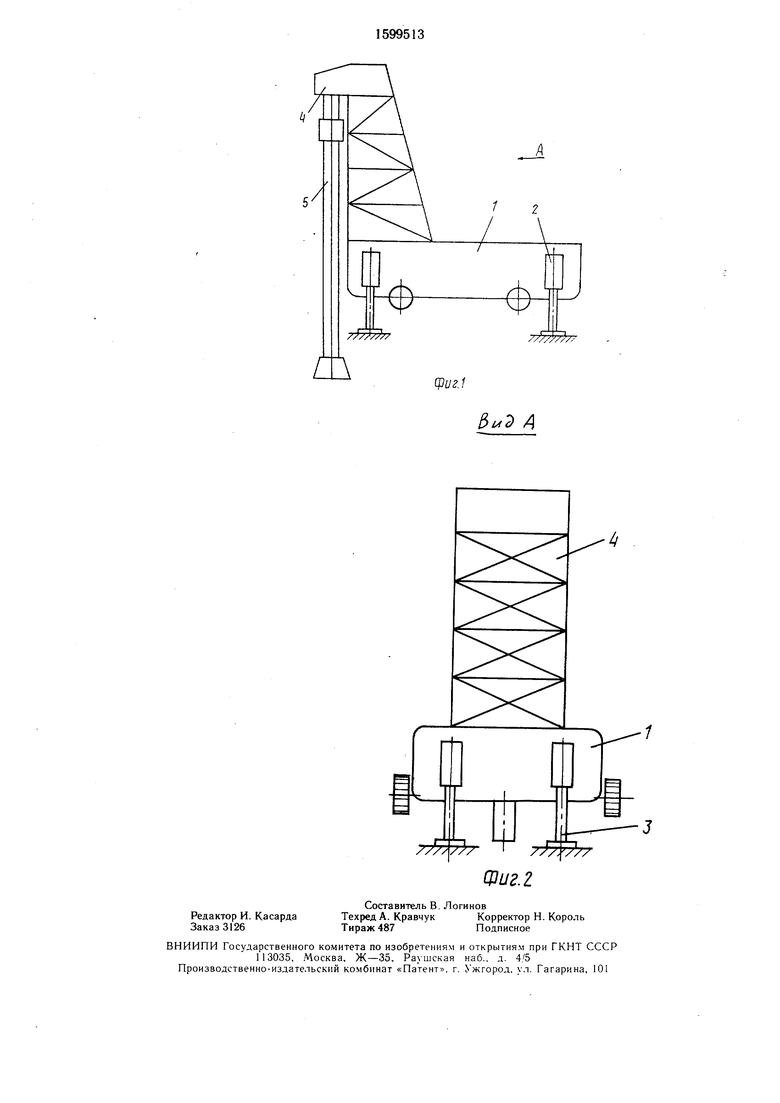
На фиг. 1 изображен буровой агрегат, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - механизм горизонтирвания платформы агрегата.
Буровой агрегат состоит из платформы с ходовой частью 1, установленной во время бурения на опорные гидродомкраты 2 и 3, и мачты 4 с буровым инструментом 5 (вращателем, буровым ставом, долотом и т.д.). ig Гидродомкраты 2 расположены вдоль продольной стороны платформы, а гидродомкраты 3 - вдоль поперечной стороны.
Для автоматического поддержания во время процесса бурения вертикального попо одной продольной оси платформы. При этом сигналы на выходе датчиков 6 и 7: +Уб - сигнал датчика 6; О - сигнал датчика 7.
Управляющие сигналы на выходе блока 9 равны
V, ,
где Vio и V и - напряжения управления на входе гидроаппаратуры управления, соответственно гидроаппаратуры 10 и 11;
воздействие осуществляется только на гидродомкраты 2 продольной стороны платформы, по которой произошло отклонение.
В случае, когда отклонение платформы происходит и по продольной и по поперечной сторонам, сигналы на выходе датчиков
ложения мачты применен механизм гори- 20 б и 7, например, равны по абсолютной вели- зонтирования платформы. Последний имеетчине и противоположны по знаку, т.е. 7
(фиг. 3) датчики 6 и 7 контроля горизонтального положения платформы, которые установлены на платформе 1. Их выходы соединены -с блоком 8 определения наклона jg платформы. Выход блока 8 подключен к весовому входу блока 9 селекции сигнала управления гидроаппаратурой 10 и 11.
К управляющему входу блока 9 селекции сигнала управления подключен выход вычитания блока 12, по входам которого подключены выходы датчиков 6 и 7. Блок 9 селекции сигнала управления может быть выполнен в виде двух компараторов с управляющими и весовыми входами. Причем выход блока 8 соединен одновременно с двумя весовыми входами компараторов, а 35 выход вычитателя 12 соединен одновременно с двумя управляющими входами компараторов блока 9.
Буровой агрегат работает следующим образом.
-Уб.
В этом случае управляющие сигналы на выходе блока 9 равны
V,(V6XV7); (V6XV7).
Сигналы, подаваемые на входы гидроаппаратуры управления гидродомкратами, действуют в направлении уменьшения кре- 30 на платформы; их действие прекращается при равенстве нулю сигналов на выходах датчиков 6 и 7, что соответствует горизонтальному положению буровой платформы.
Формула изобретения
Буровой агрегат, включающий платформу с опорными гидродомкратами, мачту с буровым инструментом, смонтированную на платформе, и механизм горизонтирования платформы с датчиками контроля ее гоВ процессе работы бурового агрегата ризонтального положения и с гидроаппа- вследствие вибрации бурового инструментаратурой управления положением платформы,
отличающийся тем, что, с целью повыще- ния производительности и надежности работы бурового агрегата, механизм горизон5 возможно проседание грунта под гидродомкратами, что приводит к нарушению горизонтального положения платформы 1.
При наклоне платформы на выходе датчи- 5 тирования включает блок вычитания, блок ков 6 и 7 появляются сигналы, поступаю-определения наклона платформы и блок
щие на входы 8 определения сигналаселекции сигнала управления гидроаппанаклона и вычитателя 12. Блок 8 определе-ратурой, причем выходы датчиков соединения сигнала наклона предназначен для болеены с входами блока определения наклона
крутого нарастания выходного сигнала в слу-платформы и блока вычитания, выходы посчае наличия сигналов отклонения на двух go ледних соединены соответственно с весовым и управляющим входами блока селекции сигнала управления гидроаппаратурой, выходы которого соединены с входами гидроаппаратуры управления, при этом контроль горизонтального положения плат- 55 формы осуществляется при помощи двух датчиков для раздельного контроля наклона платформы вдоль ее продольной и попедатчиках 6 и 7 и выполнен в виде умножителя.
Блок 9 селекции сигнала управления реализует следующий алгоритм управления гидродомкратами.
В случае появления сигнала толькй на одном датчике, например, на выходе датчика 6, что соответствует наклону платформы только
речной осей.
по одной продольной оси платформы. При этом сигналы на выходе датчиков 6 и 7: +Уб - сигнал датчика 6; О - сигнал датчика 7.
Управляющие сигналы на выходе блока 9 равны
V, ,
б и 7, например, равны по абсолютной вели- чине и противоположны по знаку, т.е. 7
-Уб.
В этом случае управляющие сигналы на выходе блока 9 равны
V,(V6XV7); (V6XV7).
Сигналы, подаваемые на входы гидроаппаратуры управления гидродомкратами, действуют в направлении уменьшения кре- на платформы; их действие прекращается при равенстве нулю сигналов на выходах датчиков 6 и 7, что соответствует горизонтальному положению буровой платформы.
Формула изобретения
Буровой агрегат, включающий платформу с опорными гидродомкратами, мачту с буровым инструментом, смонтированную на платформе, и механизм горизонтирования платформы с датчиками контроля ее горизонтального положения и с гидроаппа- ратурой управления положением платформы,
отличающийся тем, что, с целью повыще- ния производительности и надежности работы бурового агрегата, механизм горизон тирования включает блок вычитания, блок определения наклона платформы и блок
ледних соеди вым и управл ции сигнала рой, выходы гидроаппарат контроль гор формы осущ датчиков для на платформ
речной осей.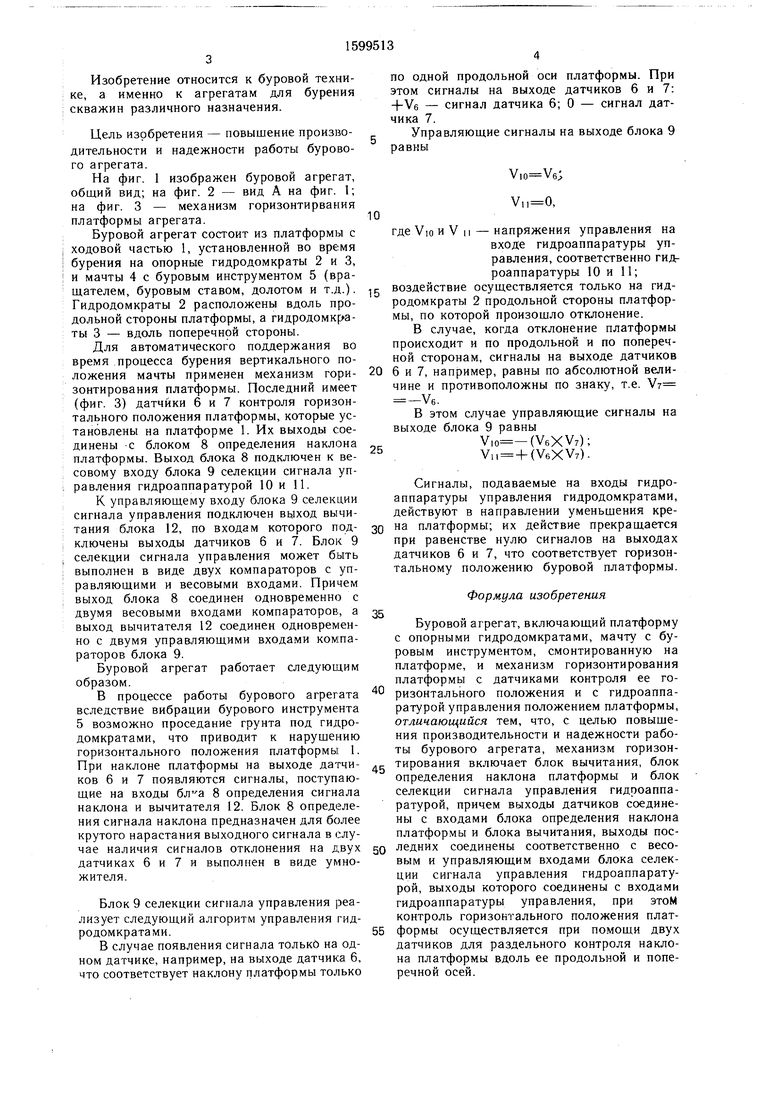
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ГОРИЗОНТИРОВАНИЯ НЕСУЩЕЙ ПЛАТФОРМЫ С БУРОВЫМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2196893C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| Буровой станок | 1989 |
|
SU1641971A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
| МОБИЛЬНАЯ ВЫШКА ПРЕИМУЩЕСТВЕННО ДЛЯ АНТЕННЫХ СИСТЕМ | 2011 |
|
RU2469445C1 |
| АГРЕГАТ РЕМОНТНО-БУРОВОЙ АР32/40 | 2007 |
|
RU2380512C2 |
| СПОСОБ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2367762C1 |
| Устройство для бурения и расширения скважин | 1981 |
|
SU1104229A1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2496710C2 |
Изобретение относится к буровой технике и предназначено для бурения скважин различного назначения. Цель изобретения - повышение производительности и надежности работы бурового агрегата. Буровой агрегат содержит платформу (П) с ходовой частью 1 и опорными гидродомкратами (ГД), мачту с буровым инструментом и механизм горизонтирования П. Последний содержит датчики 6 и 7 для раздельного контроля патрона П вдоль ее продольной и поперечной осей, блок (Б) 8 определения наклона П, Б 12 вычитания и Б 9 селекции сигнала управления гидроаппаратурой 10 и 11. При этом один ГД расположен вдоль продольной, а другой ГД - вдоль поперечной сторон П. При нарушении горизонтального положения П на выходе датчиков 6 и 7 появляются сигналы, поступающие на входы Б 8 и 12. Выходные сигналы Б 8 и 12 поступают на вход Б 9 селекции сигнала управления ГД. Сигналы управления действуют в направлении уменьшения крена П. Их величина становится равной нулю при горизонтальном положении П. 3 ил.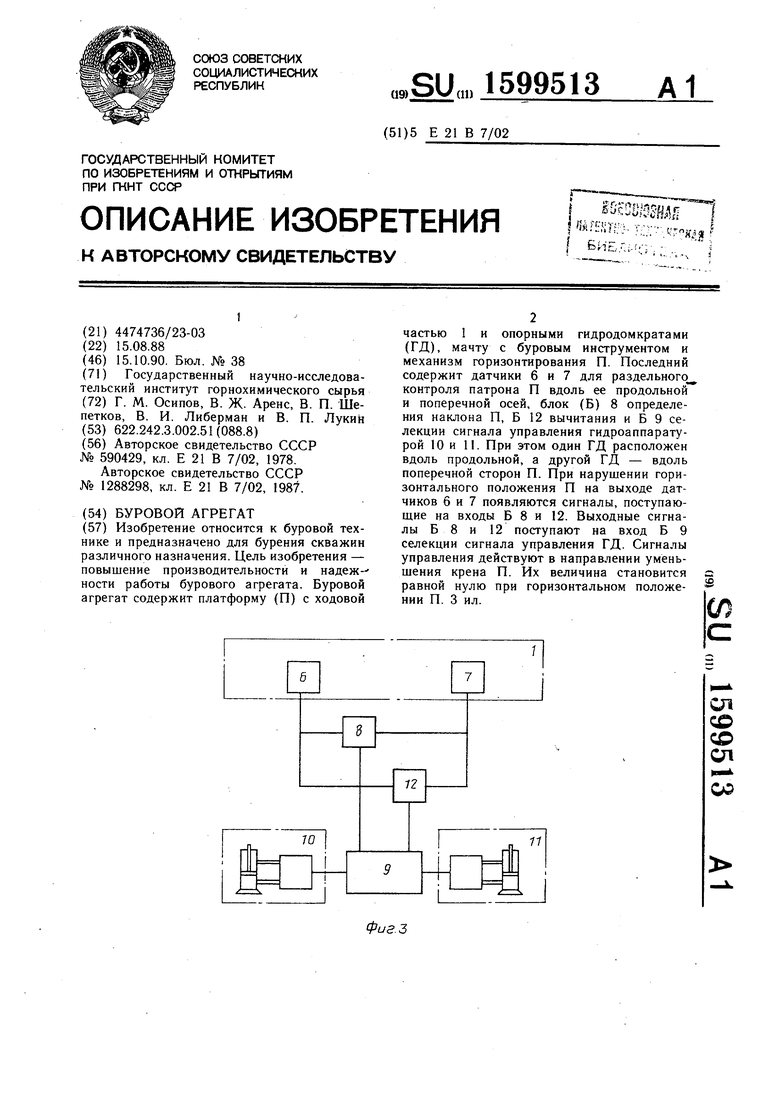
:/
Составитель В. Логинов
Техред А. КравчукКорректор Н. Король
Тираж 487Подписное
/2
А
Фиг. г
| Буровой станок | 1976 |
|
SU590429A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство автоматического управления буровой машиной | 1985 |
|
SU1288298A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
